

2.5.7.2 Анализ ад с кзр во вращающейся системе координат
В системе координат с вещественной осью
![]() и
мнимой осью
и
мнимой осью
![]() ,
вращающейся с относительной скоростью
,
вращающейся с относительной скоростью
![]() ,
система уравнений (58) в операторной
форме запишется в виде:
,
система уравнений (58) в операторной
форме запишется в виде:
 (61)
(61)
Для моделирования необходимо определить параметры схемы замещения асинхронной машины по паспортным данным.
1. Номинальное скольжение:
![]() , (62)
, (62)
где
![]() -
синхронная скорость (скорость вращения
магнитного поля);
-
синхронная скорость (скорость вращения
магнитного поля);
![]() -
номинальная скорость вращения.
-
номинальная скорость вращения.
2. Критическое скольжение:
![]() , (63)
, (63)
где
![]() - отношение момента короткого замыкания
(пускового) к номинальному моменту,
- отношение момента короткого замыкания
(пускового) к номинальному моменту,
![]() .
.
3. Конструктивный коэффициент:
![]() (64)
(64)
Первоначально конструктивный коэффициент
задается в диапазоне ,![]() для
предварительного расчета параметров
схемы замещения. После расчета
индуктивностей, входящих в уравнение
(64), необходимо сравнить полученное
значение с первоначально выбранным, и
уточнить расчет. Обычно за две - три
инерции удается достичь совпадения
принятого и рассчитанного конструктивного
коэффициента.
для
предварительного расчета параметров
схемы замещения. После расчета
индуктивностей, входящих в уравнение
(64), необходимо сравнить полученное
значение с первоначально выбранным, и
уточнить расчет. Обычно за две - три
инерции удается достичь совпадения
принятого и рассчитанного конструктивного
коэффициента.
4. Коэффициент вязкого трения:
![]() (65)
(65)
В уравнении (65) механические потери
![]() определяются из уравнения:
определяются из уравнения:
![]() (66)
(66)
5. Сопротивление статора:
![]() (67)
(67)
6. Сопротивление ротора:
![]() ,(68)
,(68)
где
![]() -
отношение тока короткого замыкания к
номинальному току,
-
отношение тока короткого замыкания к
номинальному току,
![]() .
.
7. Индуктивности статора и ротора:
 (69)
(69)
8. Индуктивность рассеяния статора и ротора:
![]() (70)
(70)
9. Взаимоиндукция:
![]() (71)
(71)
2.6 Синхронный электродвигатель. Механические характеристики сд в различных режимах работы. Механические характеристики сд в двигательном режиме. Угловая характеристика сд
В СД к статорной обмотке подводится 3-х
фазное симметричное напряжение. К
обмотке ротора - постоянный ток. Скорость
вращения СД при моменте на валу двигателя
в пределах от
![]() до
до
![]() является постоянной, и, при этом, не
зависит от нагрузки, поэтому до последнего
времени область применения синхронных
машин ограничивалась мощными приводами
постоянной скорости. Мера нагрузки
синхронных машин - угол между вращающимися
осями магнитного поля и ротора, угол
рассогласованная
является постоянной, и, при этом, не
зависит от нагрузки, поэтому до последнего
времени область применения синхронных
машин ограничивалась мощными приводами
постоянной скорости. Мера нагрузки
синхронных машин - угол между вращающимися
осями магнитного поля и ротора, угол
рассогласованная
![]() .
При этом между этими осями существует
упругая электромагнитная связь, которая
при возрастании нагрузки на валу
растягивается, т.е. угол между осями
возрастает, при уменьшении нагрузки
сжимается, т.е. угол между осями
уменьшается. При этом скорость вращения
обеих осей является функцией частоты
напряжения, подводимого к статору, и
числа пар полюсов машины
:
.
При этом между этими осями существует
упругая электромагнитная связь, которая
при возрастании нагрузки на валу
растягивается, т.е. угол между осями
возрастает, при уменьшении нагрузки
сжимается, т.е. угол между осями
уменьшается. При этом скорость вращения
обеих осей является функцией частоты
напряжения, подводимого к статору, и
числа пар полюсов машины
:
![]()
Если рассмотреть векторную диаграмму СМ, то угол будет образовываться фазовым смещением ЭДС, наведённой в статорной обмотке магнитным потоком возбуждения и напряжения, приложенным к фазе статорной обмотке.
Если момент нагрузки СМ в пределах
критического изменяется, предположим,
является пульсирующим, т.е. постоянно
отклоняется на
![]() ,
то угловая скорость вала двигателя
также будет изменяться относительно
некоторого среднего значения угловой
скорости.
,
то угловая скорость вала двигателя
также будет изменяться относительно
некоторого среднего значения угловой
скорости.
Если же момент на валу двигателя превысит , то ЭП начинается работать неустойчиво - двигатель «выпадает» из синхронизма. В общем виде, механическая характеристика СД в двигательном режиме может быть представлена:
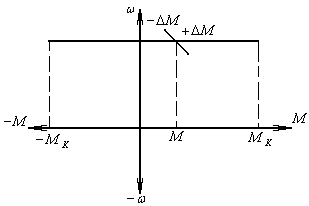
Рис.63 Механическая характеристика СД
С помощью механической характеристики
СД судить о том, в какой области привод
работает устойчиво и в какой неустойчиво,
практически невозможно. Для анализа
устойчивости необходимо знать зависимость,
которая может быть получена в результате
анализа электрической схемы замещения
одной фазы статора обмотки, а также
анализа векторной диаграммы двигателя
(![]() ).
Эта зависимость называется угловой
характеристикой СД:
).
Эта зависимость называется угловой
характеристикой СД:
![]() ,
(72)
,
(72)
где - напряжение, приложенное к фазе обмотке статора;
- ЭДС от магнитного потока возбуждения;
- индуктивное сопротивление фазы статорной обмотки;
- угловая скорость магнитного поля;
- угол между векторами напряжения и ЭДС (угол между осями магнитного поля и ротора).
СД конструируется так, чтобы номинальному
моменту
соответствовала
величина угла рассогласования
![]() .
.
![]() ,
,
![]() ,
,
![]() .
.
Перегрузочная способность:
![]() .
.
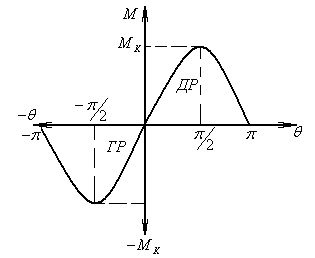
Рис.64 Угловая характеристика СД