

2.4 Дпт смешанного возбуждения
Этот вид двигателя совмещает свойства двигателей НВ и ПВ, а именно, скорость идеального ХХ у них определяется составляющей магнитного потока, созданная независимой ОВ. Но при этом характеристики остаются существенно нелинейными и обладают важнейшим свойством: большими значениями момента при малых скоростях. Следовательно, главный технический мотив их применения: максимально полное использование мощности двигателя при предельно простом выполнении самого ЭП, т.е. отсутствие сложных преобразователей, сложных систем управления и т.д. Но в последнее время, из-за развития и удешевления преобразовательной техники, использование ЭП с двигателем параллельного возбуждения и самовозбуждения постепенно вытесняется приводами с ДНВ, и ещё в большей степени с двигателями переменного тока.
2.5 Ад. Механические характеристики ад при различных режимах работы
Чтобы получить уравнения механических характеристик АД, используем упрощенную схему замещения АД.
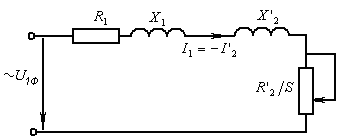
Рис.40 Приведенная Г-образная схема замещения АД
В этой схеме замещения реальные электромагнитные связи между статором и ротором заменены электрическими (гальваническими). Кроме того, в этой схеме замещения параметры обмотки ротора приведены к параметрам фазы статорной обмотки, а также в схеме замещения учитывается механическая нагрузка на валу двигателя.
![]() - напряжение, приложенное к фазе статорной
обмотки;
- напряжение, приложенное к фазе статорной
обмотки;
![]() - ток фазы статорной обмотки;
- ток фазы статорной обмотки;
![]() - приведенный ток в обмотке ротора, без
учёта влияния ветви намагничивания;
- приведенный ток в обмотке ротора, без
учёта влияния ветви намагничивания;
![]() - активное сопротивление фазы обмотки
статора;
- активное сопротивление фазы обмотки
статора;
![]() - индуктивное сопротивление статора;
- индуктивное сопротивление статора;
![]() - приведенное индуктивное сопротивление
ротора;
- приведенное индуктивное сопротивление
ротора;
![]() - приведенное активное сопротивление
ротора с учётом механической нагрузки
на его валу;
- приведенное активное сопротивление
ротора с учётом механической нагрузки
на его валу;
![]() - скольжение,
- скольжение,
![]() ;
;
![]() - скорость ВМП,
- скорость ВМП,
![]() ,
,
- число пар полюсов.
Будем считать потери двигателя равными нулю, следовательно:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
 . (28)
. (28)
Уравнение (28) описывает зависимость электромагнитного момента двигателя от напряжения , приложенного к статору, угловой скорости ВМП , нагрузки двигателя (в этом выражении она представлена скольжением ), которая в свою очередь определяет скорость ротора.
Если в (28) подставим значения скольжения
от
-1 до +1 и подставим те же значения
в уравнение (29), то получим уравнения
характеристик зависимости момента от
скольжения (![]() ),
а также скорости
вала двигателя, от вращающего момента
(
).
),
а также скорости
вала двигателя, от вращающего момента
(
).
![]() (29)
(29)

Рис.41 Механическая характеристика АД -
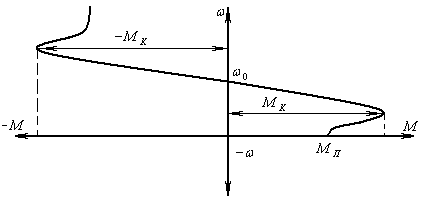
Рис.42 Механическая характеристика АД -
Обе характеристики имеют ярко выраженные
точки экстремума. При этом область
![]() описывает двигательный режим работы
(
описывает двигательный режим работы
(![]() ),
а область характеристик
),
а область характеристик
![]() описывает генераторный режим при котором
.
При этом значения критический момент
описывает генераторный режим при котором
.
При этом значения критический момент
![]() в генераторном режиме больше, чем
значения
в
двигательном режиме. Определим точки
экстремума, для этого продифференцируем
уравнение (28), приравняем 1-ую производную
к 0 и решим относительно
.
в генераторном режиме больше, чем
значения
в
двигательном режиме. Определим точки
экстремума, для этого продифференцируем
уравнение (28), приравняем 1-ую производную
к 0 и решим относительно
.
Найденное значение скольжения - критическое:
![]() (30)
(30)
Поставив (30) в (28), решим его относительно момента , которое будет равно , то получим:
![]() (31)
(31)
В уравнениях (30), (31) знак «+» указывает на двигательный режим, «-»- на генераторный режим.
Следовательно, критический момент
в
генераторном режиме по модулю больше,
чем в двигательном режиме. Кроме того,
для анализа механических характеристик
в двигательном режиме, необходимо
определить значение момента, развиваемого
двигателем при скольжении
![]() ,
т.е. при неподвижном роторе (пускового
момента):
,
т.е. при неподвижном роторе (пускового
момента):
 (32)
(32)
Механические характеристики, построенные в соответствии с уравнениями (28) - (32) - механические характеристики в параметрических координатах.
Если они построены при номинальных
![]() ,
,
![]() и при отсутствии добавочных сопротивлений
в цепи ротора, то такие характеристики
называют естественными, в противном
случае искусственными.
и при отсутствии добавочных сопротивлений
в цепи ротора, то такие характеристики
называют естественными, в противном
случае искусственными.
Построим семейства искусственных характеристик в двигательном режиме при изменении одного из трех параметров (далее рассмотрим только в двигательном режиме).
1.
![]() -
реостатные характеристики.
-
реостатные характеристики.
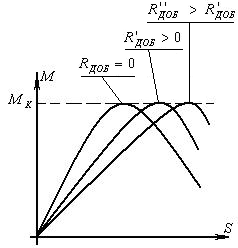
Рис.43а Семейство реостатных характеристик
в двигательном режиме АД -
![]()
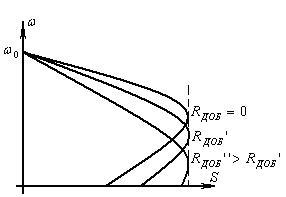
Рис.43б Семейство реостатных характеристик
в двигательном режиме АД -
![]()
При увеличении добавочного сопротивления
![]() ,
вводимого в цепь ротора, критический
момент
не
меняется, а пусковой момент
,
вводимого в цепь ротора, критический
момент
не
меняется, а пусковой момент
![]() растёт (чем выше активное сопротивление
ротора, тем больше
).
Вследствие чего увеличивается линейный
наклон механических характеристик,
которые называются реостатными. Т.е.
чем больше сопротивление
,
тем меньше жёсткость, следовательно,
больше наклон механических характеристик.
растёт (чем выше активное сопротивление
ротора, тем больше
).
Вследствие чего увеличивается линейный
наклон механических характеристик,
которые называются реостатными. Т.е.
чем больше сопротивление
,
тем меньше жёсткость, следовательно,
больше наклон механических характеристик.
2.
![]() (можно
только понизить напряжение).
(можно
только понизить напряжение).
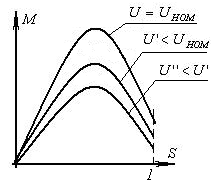
Рис.44а Семейство характеристик в двигательном режиме АД при понижении напряжения -
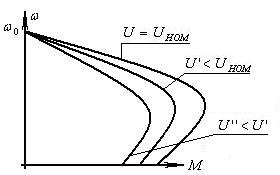
Рис.44б Семейство характеристик в
двигательном режиме АД при понижении
напряжения -
![]()
При снижении напряжения:
а) уменьшается критический момент
![]() ,
снижается перегрузочная способность
двигателя;
,
снижается перегрузочная способность
двигателя;
б) уменьшается пусковой момент
![]() ,
т.е. снижается вероятность успешного
запуска двигателя;
,
т.е. снижается вероятность успешного
запуска двигателя;
в) снижается жесткость характеристик в рабочей части.
3.
![]()
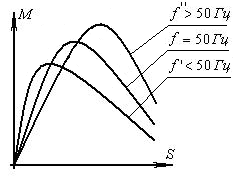
Рис.45а Семейство характеристик в двигательном режиме АД при изменении частоты -
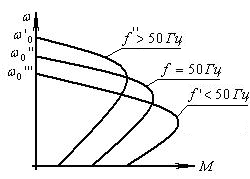
Рис.45б Семейство характеристик в двигательном режиме АД при изменении частоты -
При увеличении частоты
![]() уменьшаются критический
уменьшаются критический
![]() и пусковой
моменты, скорость
увеличивается, а при уменьшении -
наоборот.
и пусковой
моменты, скорость
увеличивается, а при уменьшении -
наоборот.
Представленное семейство механических характеристик было построено на основании уравнений (28)-(32). Эти расчёты требуют сложных и громоздких промежуточных вычислений, в которых определяют, в частности, активное и индуктивное сопротивление обмоток статора и ротора. Эти расчёты при решении некоторых инженерных задач могут быть неоправданны, поэтому используют метод построения механических характеристик с применением формулы Клосса, который позволяет использовать для этой цели паспортные данные двигателя.