

2.3 Механические характеристики двигателей последовательного возбуждения
Двигатели последовательного возбуждения широко применяются в приводах транспортных механизмов (тяговых механизмов), а также в приводах механизмов, которые отличаются сложным запуском и малыми моментами нагрузки в рабочем режиме.
2.3.1 Механические характеристики дпт пв в двигательном режиме
В общем случае уравнения механических характеристик ДПТ ПВ имеют тот же вид что и у ДПТ с НВ:
![]() , (24)
, (24)
![]() (25)
(25)
Однако учитывается то, что в таких
двигателях якорная обмотка соединена
с обмоткой возбуждения последовательно,
магнитный поток возбуждения перестанет
быть независимой переменной, а становится
функцией, ток якоря
![]() ,
следовательно, зависит от нагрузки на
валу двигателя. Приходится учитывать
также нелинейный характер зависимости
магнитного потока от тока. Кривую
намагничивания (рис.34) можно разбить на
2 участка.
,
следовательно, зависит от нагрузки на
валу двигателя. Приходится учитывать
также нелинейный характер зависимости
магнитного потока от тока. Кривую
намагничивания (рис.34) можно разбить на
2 участка.
1. В области малых нагрузок
![]() :
:
![]() .
.
2. При
![]() :
:
![]() .
.
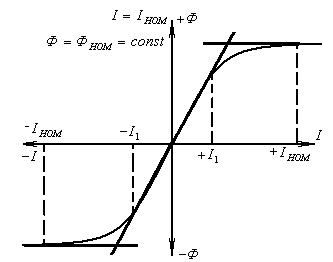
Рис.34 Кривая намагничивания
Очевидно, что в областях нагрузок, в
которых ток
![]() ,
т.е. ток близок к номинальному, уравнения
(24) и (25) можно считать абсолютно
справедливыми.
,
т.е. ток близок к номинальному, уравнения
(24) и (25) можно считать абсолютно
справедливыми.
Запишем уравнения скоростной и механической характеристик в области малых нагрузок на валу двигателя последовательного возбуждения.
![]() ,
,
![]() , (26)
, (26)
![]() ,
,
![]() (27)
(27)
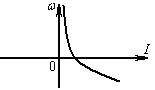
Рис.35а Скоростная характеристика ДПТ ПВ
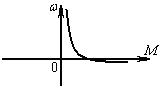
Рис.35б Механическая характеристика ДПТ ПВ
Характеристики не имеют выраженной
скорости ХХ
,
т.е. не пересекают ось ординат. Значит,
режим холостого хода отсутствует, т.к.
при токе
![]() ,
магнитный поток также
,
магнитный поток также
![]() ,
и из уравнений (26) и (27) видно, что скорость
,
и из уравнений (26) и (27) видно, что скорость
![]() .
Следовательно, при очень малых нагрузках
двигатели последовательного возбуждения
работать не могут (резко набирают
скорость, что неконтролируемо), т.е.
двигатель «идёт в разнос».
.
Следовательно, при очень малых нагрузках
двигатели последовательного возбуждения
работать не могут (резко набирают
скорость, что неконтролируемо), т.е.
двигатель «идёт в разнос».
Также, двигатели в области малых скоростей развивают большой электромагнитной момент. Большие моменты на «ползущих скоростях» - явление в ряде случаев весьма полезное.
2.3.2 Пусковой режим двигателя последовательного возбуждения
Двигатели последовательного возбуждения
(ДПВ) обладают большими значениями
начальных моментов (большими даже, чем
у двигателя независимого возбуждения).
Основная задача при пуске сводится к
ограничению пусковых токов. Чтобы
построить механические характеристики
при пуске необходимо вывести их уравнения.
При этом необходимо отметить, что, имея
нелинейный характер зависимости момента
от
тока
,
применение для анализа зависимости
![]() неудобно,
и поэтому их анализируют при помощи
скоростных характеристик:
неудобно,
и поэтому их анализируют при помощи
скоростных характеристик:
- естественной,
![]() ;
;
- искусственной, при изменении напряжения,
![]() ,
,
![]() ;
;
- искусственной, при введении добавочного сопротивления, ,
![]() .
.
Чтобы построить реостатные характеристики используют, уравнение:
![]()
Семейства пусковых характеристик представлены на рис. 36, 37.
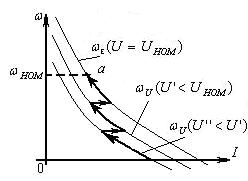
Рис.36 Семейство пусковых характеристик ДПТ ПВ при пониженном напряжении
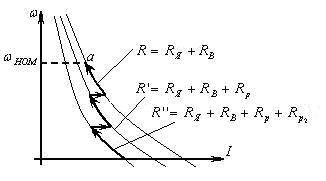
Рис.37 Семейство реостатных пусковых характеристик ДПТ ПВ
2.3.3 Тормозные режимы дпв. Механические характеристики дпв в тормозном режиме
Механические характеристики ДПВ не пересекают оси ординат, а, следовательно, не могут располагаться во 2-ом квадранте координатной плоскости, поэтому рекуперативное торможение для ДПВ является невозможным. Кроме того, учитывая, что обмотки якоря и ОВ соединены между собой последовательно, то изменить соотношение направлений тока якоря и магнитного потока возбуждения становится невозможным. Следовательно, торможение противовключением реализовать в ДПВ, также невозможно. Поэтому единственный возможный способ торможения - динамическое торможение.
С этой целью зажимы двигателя отключают от питающей сети и замыкают на тормозное сопротивление . Однако характер процессов, протекающих при динамическом торможении в ДПВ, существенно отличается от процессов протекающих в ДПТ с НВ.
Возникновение тормозного момента является процессом самовозбуждения. Смысл этого режима в том, что при отключении двигателя от питающей сети в обмотке возбуждения остаётся небольшой остаточный магнитный поток, который наводит в якорной обмотке ЭДС. Под действием этого ЭДС в замкнутой цепи протекает ток , согласованный по направлению с остаточным магнитным потоком. Этот ток усиливает магнитный поток, в результате повышается ЭДС, следовательно, возрастают ток и магнитный поток. При некотором значении потока процесс становится установившимся.
Чтобы процесс самовозбуждения при динамическом торможении был возможен в установившемся режиме, необходимо сопротивление подбирать так, чтобы:
![]() ,
,
где
![]() - критическое сопротивление.
- критическое сопротивление.
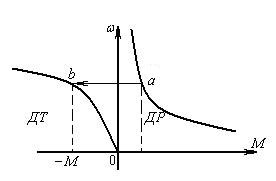
Рис.38 Механическая характеристика ДПВ при динамическом торможении
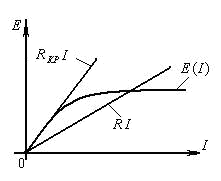
Рис.39 Характеристика выбора
Если
подобрать так, чтобы
![]() ,
то функции
,
то функции
![]() и
и
![]() не
будут иметь общих точек, следовательно,
процесс самовозбуждения не может быть
установившимся, и при таких условиях
динамическое торможения станет
невозможным.
не
будут иметь общих точек, следовательно,
процесс самовозбуждения не может быть
установившимся, и при таких условиях
динамическое торможения станет
невозможным.
Динамическая модель ЭП с ДПВ в области нагрузок на валу близких к номинальному, представляется так же, как и модель ДПТ с НВ.