

2.2.5 Энергетические режимы в эп с дпт с нв
С помощью статической механической
характеристики для любой точки в
плоскости координат
и
можно
однозначно определить энергетический
режим ЭП, а именно, направление потоков
энергии и соответствующие им значения
электрической и механической мощности.
При этом будем считать, что напряжение
в цепи якоря равно номинальному
![]() ,
магнитный поток равен номинальному
,
магнитный поток равен номинальному
![]() ,
и в цепь якоря введено добавочное
сопротивление
,
и в цепь якоря введено добавочное
сопротивление
![]() (
(![]() ).
Примем, что момент является переменной
величиной, который будем изменять с
помощью некоторого активного механического
устройства, находящегося на валу ЭД и
скорость
будет принимать значения, соответствующие
этому моменту.
).
Примем, что момент является переменной
величиной, который будем изменять с
помощью некоторого активного механического
устройства, находящегося на валу ЭД и
скорость
будет принимать значения, соответствующие
этому моменту.
Запишем уравнения основных функций:
![]() ;
;
![]()
![]() .
.
Построим при этих условиях статическую механическую характеристику:
![]()
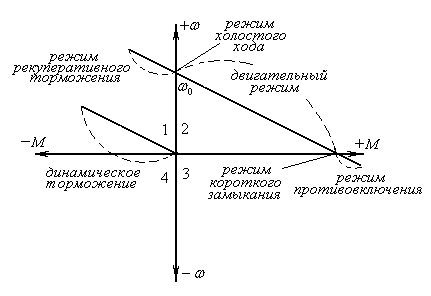
Рис.27 Энергетические режимы ДПТ с НВ
Согласно рис.27 можно выделить 6 режимов:
1) ХХ – режим холостого хода;
2) ДР - двигательный режим;
3) КЗ – режим короткого замыкания;
4) РП - режим противовключения;
5) РТ - рекуперативное торможение;
6) ДТ - динамическое торможение.
Для каждого режима рассмотрим направление тока , момента на валу двигателя, потоков энергии: механической, электрической, энергии рассеивания, и уравнение энергетического баланса.
1. Режим хх.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
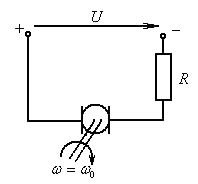
Рис.28 Режим холостого хода
В этом режиме потоки энергии отсутствуют,
т.к. механическая и электрическая энергии
равны нулю. Из сети двигатель энергии
не потребляет электроэнергии
![]() ,
т.к.
,
т.к.
![]() ,
механическая мощность
,
механическая мощность
![]() ,
т.к.
.
,
т.к.
.
2. Двигательный режим. Если увеличить нагрузку, то следует увеличение момента на валу двигателя, что приводит к уменьшению скорости вращения вала. Механическая характеристика из точки ХХ переместится в 1-ый квадрант.
![]() ,
,
![]() ,
,
![]() .
.
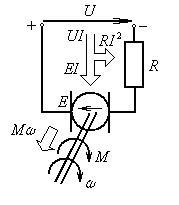
Рис. 29 Двигательный режим
Направление скорости вращения
и электромагнитного момента будут
совпадать, и поток энергии будет направлен
от двигателя к механизму. Ток в цепи
якоря будет противоположным ЭДС, и будет
совпадать с направлением напряжения
.
Следовательно, электрическая энергия
![]() будет направлена от источника питания
к двигателю. При этом, в цепи якоря часть
электрической энергии будет рассеиваться
в виде тепла
будет направлена от источника питания
к двигателю. При этом, в цепи якоря часть
электрической энергии будет рассеиваться
в виде тепла
![]()
Уравнение энергетического баланса:
![]() .
.
3. Режим короткого замыкания. Если
продолжать увеличивать момент
на валу двигателя, то скорость
будет снижаться, и при значении момента,
равном критическому
![]() ,
она станет равным нулю:
.
,
она станет равным нулю:
.
При , .
![]() ,
т.к.
.
,
т.к.
.
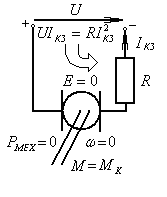
Рис.30 Режим короткого замыкания
Необходимо отметить, что этот режим при некоторых условиях, а именно при достаточно больших значениях и малых значениях цепи якоря может оказаться неприемлимым для двигателя:
![]() ;
;
![]() .
.
Потребляемая двигателем из сети энергия вся рассеивается в виде тепла в двигателе. Направление электрической мощности: от источника питания к двигателю.
Уравнение энергетического баланса:
![]() .
.
4. Режим противовключения
Нетрудно убедиться, что режим КЗ является энергетически не эффективным. Энергетически ещё более не эффективным является режим, который мы получаем при ещё большем увеличении нагрузки на валу двигателя.
Если продолжать увеличивать момент
на
валу
![]() ,
то вал начнёт вращаться в обратном
направлении, т.е. двигатель реверсируется.
При этом ЭДС становится отрицательным
,
то вал начнёт вращаться в обратном
направлении, т.е. двигатель реверсируется.
При этом ЭДС становится отрицательным
![]() ,
и ток
в цепи якоря:
,
и ток
в цепи якоря:
![]()
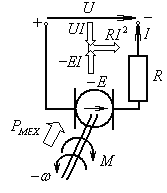
Рис. 31 Режим противовключения
Механическая мощность
![]() ,
где
,
где
![]() ,
т.е. направлена от механизма к двигателю.
,
т.е. направлена от механизма к двигателю.
Электрическая мощность
![]() направлена от питающей сети к двигателю.
направлена от питающей сети к двигателю.
Уравнение баланса мощностей:
![]() ,
т.е. в режиме противовключения и
электрическая мощность, потребляемая
двигателем из сети и механическая
мощность, направленная от механизма к
двигателю, рассеивается в виде тепла в
двигателе.
,
т.е. в режиме противовключения и
электрическая мощность, потребляемая
двигателем из сети и механическая
мощность, направленная от механизма к
двигателю, рассеивается в виде тепла в
двигателе.
5. Рекуперативный режим характеризуется
тем, что при изменении направления
момента, действующего на двигатель,
скорость
становится
![]() .
ЭДС знака не меняет:
.
ЭДС знака не меняет:
![]() Тогда ток в цепи якоря:
Тогда ток в цепи якоря:
![]() изменит своё направление, т.е. будет
отрицательным. Отрицательным становится
и электрическая мощность:
изменит своё направление, т.е. будет
отрицательным. Отрицательным становится
и электрическая мощность:
![]() .
Кинетическая энергия
.
Кинетическая энергия
![]() преобразуется в электрическую, которая
направлена к источнику питания:
преобразуется в электрическую, которая
направлена к источнику питания:
![]() .
.
Небольшая часть энергии рассеивается
в виде тепла в двигателе, т.о. уравнение
энергетического баланса:
![]() .
.
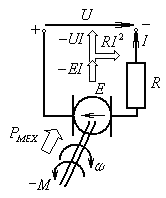
Рис. 32 Рекуперативный режим
Т.о. рекуперативный режим отличается тем, что он является генераторным со стороны механизма (механическая энергия направлена от механизма к двигателю), так и со стороны питающей сети (электрическая энергия направлена от двигателя к сети), следовательно, наиболее энергетически эффективен - экономичен.
6. Динамическое торможение реализуется
следующим образом: якорная обмотка
отключается от питающей сети (![]() ),
и замыкается на тормозное сопротивление
),
и замыкается на тормозное сопротивление![]() ,
сопротивление обмотки якоря становится:
,
сопротивление обмотки якоря становится:
![]()
Ток в якорной цепи:
![]() .
.
Момент
![]()
![]() -
изменяет своё направление и по отношению
к направлению скорости становится
тормозным.
-
изменяет своё направление и по отношению
к направлению скорости становится
тормозным.
Поток электрической энергии и соответственно электрическая мощность:
![]() .
.
Механическая энергия
![]() при динамическом торможении направлена
от механизма к двигателю.
при динамическом торможении направлена
от механизма к двигателю.
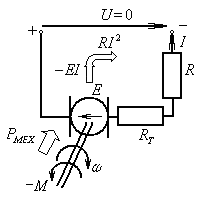
Рис.33 Динамическое торможение
Уравнение баланса мощностей:
![]()
Механичная энергия, потребляемая двигателем от механизма преобразуется в электромагнитную, которая в свою очередь рассеивается в виде тепла в двигателе.
Таким образом, если расставить все рассматриваемые режимы в порядке их энергетической эффективности, то эта последовательность будет иметь вид (от худшего к лучшему):
1. Режим противовключения.
2. Режим КЗ
3. Режим динамического торможения.
4. Двигательный режим.
5. Режим ХХ
6. Рекуперативный режим.