

2.3.3. Построение регулятора перемещения при средних перемещениях
При отработке
средних перемещений скорость вращения
двигателя не выходит на установившуюся.
Это происходит потому, что заданный
путь меньше пути разгона до установившейся
скорости, поэтому двигатель разгоняется
до какой-то скорости
![]() ,
меньше
,
меньше![]() ,
а затем тормозится до нуля.
,
а затем тормозится до нуля.
Из сказанного
ранее, возникает необходимость изменять
коэффициент усиления
![]() ,
с тем, чтобы система отрабатывала их с
минимальным временем, то есть с заданным
допустимым ускорением. Для реализации
этого необходимо выполнить регулятор
положения с нелинейной характеристикой.
,
с тем, чтобы система отрабатывала их с
минимальным временем, то есть с заданным
допустимым ускорением. Для реализации
этого необходимо выполнить регулятор
положения с нелинейной характеристикой.
Представляется целесообразным установить взаимосвязь между величиной задания на скорость (выход регулятора положения) при средних перемещениях в функции напряжения рассогласования:

Зависимость
выходного напряжения от входного
регулятора положения представляет
собой параболу. Из уравнения найдем
зависимость коэффициента усиления
регулятора положения от величины
рассогласования
![]()
![]() ,
,
Зависимость
коэффициента усиления нелинейного
регулятора положения в функции
![]() в зоне средних перемещений представляет
собой гиперболическую зависимость.
в зоне средних перемещений представляет
собой гиперболическую зависимость.
2.3.4. Построение регулятора положения при больших перемещениях
В режиме больших
перемещений в системе регулирования
имеют место два ограничения: выход
регулятора положения и выход регулятора
скорости. Поскольку выход регулятора
скорости является заданием на ток, то,
ограничивая эту величину, тем самым
ограничиваем ток якоря при отработке
больших перемещений. Ограничение выхода
регулятора положения ограничивает
заданную установившуюся скорость при
отработке больших перемещений.
Следовательно, в этом режиме двигатель
будет разгоняться, и тормозиться при
постоянном заданном ускорении
![]() ,
а его скорость не превышает
,
а его скорость не превышает
![]() .
.
Регулятор положения находится в режиме ограничения на уровне
![]() .
.
Коэффициент усиления регулятора положения при больших перемещениях рассчитывается по формуле
![]() .
.
Напряжение рассогласования при больших перемещениях
 .
.
Рассчитанное
![]() соответствует оптимальному торможению,
при котором система отрабатывает
заданное перемещение с
соответствует оптимальному торможению,
при котором система отрабатывает
заданное перемещение с
![]() за минимальное время с постоянным
ускорением.
за минимальное время с постоянным
ускорением.
2.3.6. Нелинейный регулятор положения
Учитывая возможный
диапазон изменения коэффициентов
регулятора положения, задаются начальные
значения
![]() с возможностью последующей их корректировки
в процессе настройки системы регулирования
с возможностью последующей их корректировки
в процессе настройки системы регулирования
![]() ;
;
![]() ;
;
![]() .
.
Определим напряжение рассогласования, при котором линейный участок характеристики переходит в параболическую её часть:
![]() ;
;

Определим напряжение рассогласования, при котором регулятор положения заходит в насыщение:
![]() ,
,
![]()
Результаты расчета
характеристики регулятора положения
приведены в таблице 2.1 (в силу симметричности
характеристики расчет проведен только
для положительных значениях
).
На рисунке 2.10 приведена зависимость
![]() .
.
,
Таблица 2.1 - Характеристики регулятора положения
-
, В
0
1,5
1,8
2
2,3
2,7
3
3,4
3,74
 ,
В
,
В0
6,22
6,82
7,15
7,85
8,35
8,8
9,4
10

--
4,14
3,78
3,58
3,23
3,09
2,93
2,7
2,57
![]()
![]()
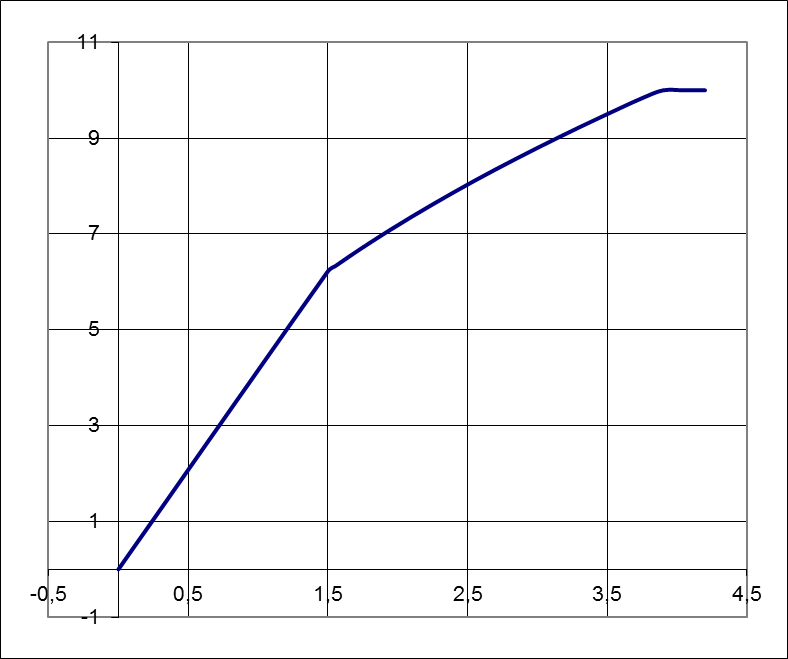
Рисунок. 2.19 - Характеристики регулятора положения