

Расчетно-пояснительная записка содержит структурный, кинематический, кинетостатический анализ кривошипно-ползунного механизма рабочей машины и расчет параметров противовесов, обеспечивающих его неполное статическое уравновешивание.
Записка состоит из 25 листов, содержит 12 рисунков, 3 таблицы.
Библиографический список состоит из 3 наименований.
ОГЛАВЛЕНИЕ
Введение
1. Структурный анализ механизма……………………………................……6
2. Кинематический анализ механизма……………………….............….……7
2.1. Кинематический анализ методом планов…………………………….... 7
2.1.1. Разметка механизма……………………………….………........….…...7
2.1.2. Расчет скоростей……………………………………………….....……8
2.1.3. Расчет ускорений……………………………………………….....…....10
2.2. Кинематический анализ методом конических диаграмм……….……..12
3. Силовой расчет механизма…………..…………………..……………...…14
3.1. Силовой расчет методом методом планов………………….………..…14
3.1.1. Определение силы полезного сопротивления……………….…….…14
3.1.2. Силовой расчет кривошипа………….…………………………….…17
3.2. Определение уравновешивающего момента
методом рычага Н.Е. Жуковского…………………………………………..19
4. Статическое уравновешивание механизма…………………………..…..20
Заключение ……………………………………………………………….....….…21
Библиографический список............………………………………….………....…22
Введение
Цель курсового проекта по ТММ – формирование системного подхода к исследованию и проектированию механизмов, формирование навыков создания расчетных моделей механизмов и выполнения конкретных расчетов.
В данном курсовом проекте выполнен структурный, кинематический, кинетостатический расчет кривошипно-ползунного механизма рабочей машины и определены параметры противовесов, обеспечивающих его статическое уравновешивание.
В ходе кинематического анализа определены крайние положения механизма и построена его разметка для 12 положений; методом планов выполнен расчет скоростей и ускорений звеньев и точек звеньев; построены кинематические диаграммы перемещения, скорости и ускорения ползуна.
В ходе кинетостатического расчета методом планов определены реакции в кинематических парах и уравновешивающий момент. Кроме того, выполнен расчет уравновешивающего момента (уравновешивающей силы) методом рычага Н.Е. Жуковского.
С целью уменьшения переменного силового воздействия на стойку произведено статическое уравновешивание механизма. Методом замещающих масс определены параметры противовесов.
1. Структурный анализ механизма
Основная задача структурного анализа – определение подвижности механизма и его строения.
Исследуемый кривошипно-ползунный механизм (рис.1) состоит из 4-х звеньев: 0 – стойка; 1 – кривошип; 2 – шатун; 3 – ползун. Звенья образуют 4
кинематические пары пятого класса.
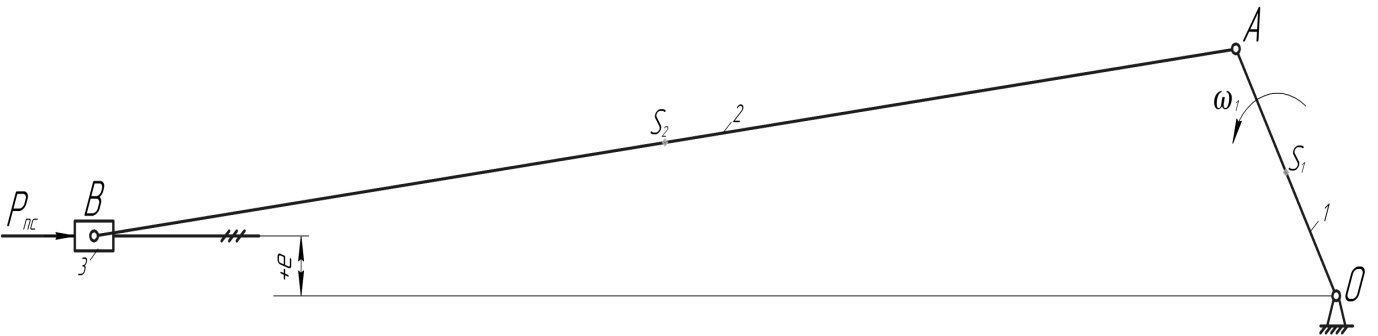
Рис. 1. Кинематическая схема механизма.
Подвижность механизмов определяется по формуле П.Л. Чебышева [1-3]:
W = 3n – 2р5 – р4,
где n – количество подвижных звеньев , р5 – количество кинематических пар пятого класса, р4 – количество пар четвертого класса.
W = 3·3 – 2·4 – 0 = 1,
На рис. 2 приведена структурная схема механизма. Механизм состоит из исходного механизма и структурной группы II класса 2 порядка.
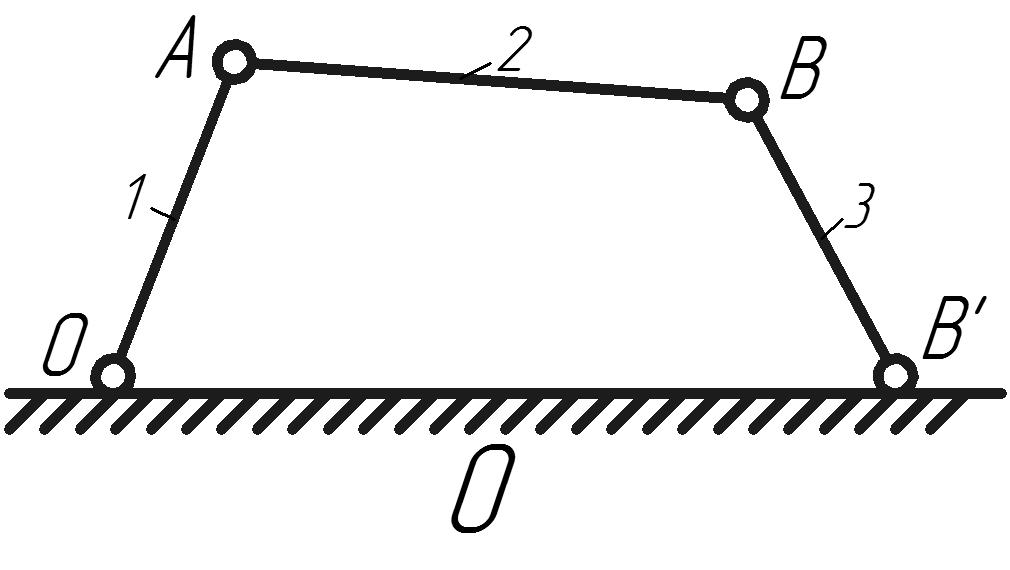
Рис. 2
Формула строения механизма:
 .
.
Исследуемый механизм является механизмом второго класса.
Формула строения механизма определяет порядок его кинематического и силового расчетов.
2. Кинематический анализ механизма
Цель кинематического анализа – изучение движения звеньев механизма.
Для ее достижения необходимо определить кинематические характеристики звеньев и точек звеньев. Задачи кинематики будем решать двумя методами – методом планов и методом диаграмм.
2.1.Кинематический анализ методом планов
2.1.1. Разметка механизма
Для определения скоростей и ускорений методом планов необходимо построить разметку механизма (рис. 3).
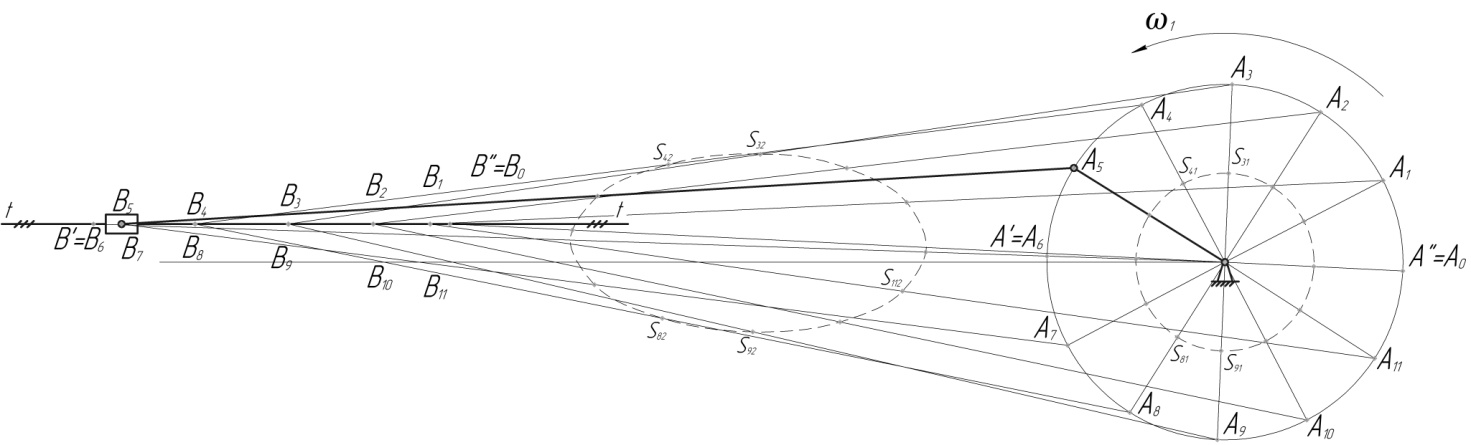
Рис. 3. План положений механизма
Разметка – ряд последовательных положений механизма, охватывающих цикл его движения. Разметка выполняется методом засечек в масштабе
В ходе разметки определяются крайние положения механизма. В этих положениях ползун меняет направление движения, т.е. VВ = 0, а кривошип и шатун вытягиваются в одну прямую или складываются. Чтобы получить крайние положения механизма, надо на траектории движения ползуна из точки О сделать засечки раствором циркуля ОА + АВ и АВ – ОА. Получим точки B' и B" соответственно.
Отрезок
B'B"
в масштабе
 изображен
ход Н ползуна. Соединим точки О
и B'.
Прямую ОB'
продолжим до пересечения с траекторией
движения точки А
(с окружностью). Получим точку А'.
В этом положении кривошип изображается
прямой ОА',
а шатун – прямой А'B'.
изображен
ход Н ползуна. Соединим точки О
и B'.
Прямую ОB'
продолжим до пересечения с траекторией
движения точки А
(с окружностью). Получим точку А'.
В этом положении кривошип изображается
прямой ОА',
а шатун – прямой А'B'.
Для определения второго крайнего положения механизма соединим точку B" с точкой О. Обозначим точку пересечения прямой ОB" с траекторией движения точки А кривошипа, как А". Отрезки ОА" и А"В" изображают кривошип и шатун во втором крайнем положении.
В положении ОА' кривошипа начинается рабочий ход механизма, а в положении ОА" рабочий ход заканчивается. В связи с этим, положения точек А' и В' примем за нулевые (точка А' совпадет с точкой А0, а точка В' – с точкой В0). Соответственно точка А" совпадает с точкой А6, а точка В" – с точкой В6. Для построения промежуточных положений механизма разделим каждый из углов, образованных кривошипом и крайних его положениях, на шесть равных частей. Получим 10 промежуточных положений кривошипа. Нумерация положений производится в направлении вращения кривошипа.
Для каждого из этих положений методом засечек определяются соответствующие положения точек В шатуна и ползуна.
В каждом положении механизма и соответствии и исходными данными определяются положения центров масс S1 кривошипа и S2 и строятся траектории их движения.