

Задача с2
Плоска рама, що складається з двох тіл, закріплених в точках А, В до нерухомого тіла і з’єднаних в точці С циліндричним шарніром або ковзною муфтою (на схемах рис. С2 умовно показано циліндричний шарнір). Рама навантажена парою сил з моментом М, силами , і розподіленим навантаженням. Визначити реакції опор і зусилля в з’єднанні. Дані наведені в таблиці С2.
Опори, в залежності від конфігурації системи, слід повернути в площині таким чином, щоб збігались дільниці стрижня на схемах опор (див. додаток А) і рами (див. рис. С2).
Момент пари вважається додатним, якщо він намагається повертати раму проти руху годинникової стрілки. Якщо в таблиці стоїть знак мінус, то момент пари направлений за рухом годинникової стрілки.
Вказівка. Задача С2 – на рівновагу системи тіл, на які діє плоска система сил. При її розв’язанні можна спочатку розглянути рівновагу всієї системи в цілому, а потім рівновагу одного з тіл системи, показавши його окремо. Можна розчленити систему на окремі тіла і розглянути рівновагу кожного тіла, враховуючи при цьому третій закон механіки (рівність дії і протидії).
Увага! Систему на окремі тіла можна розчленити тільки по з’єднанні (шарніру або ковзній муфті).
Реакції опор і зусилля в з’єднаннях приведені в додатку А.
Рис.
С2.1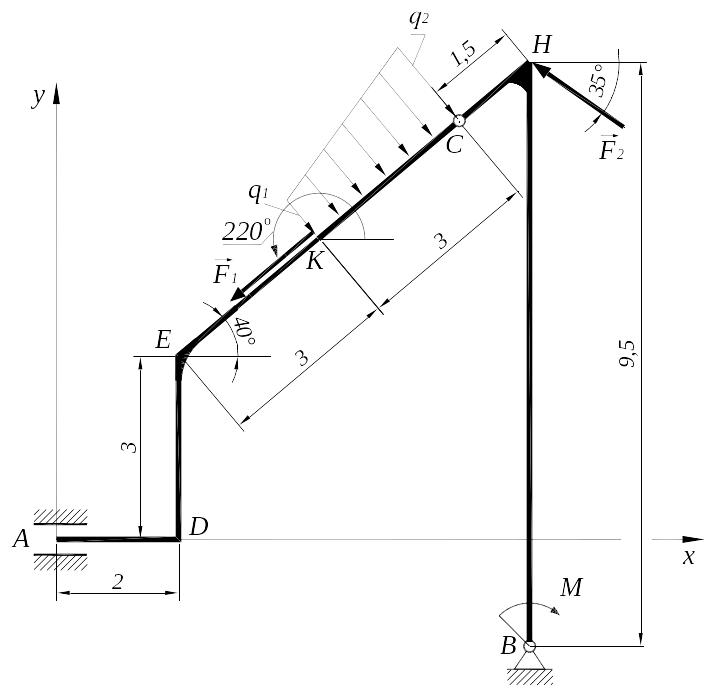
![]() і стрижень
і стрижень
![]() )
з’єднаних в точці
)
з’єднаних в точці
![]() циліндричним шарніром. В точці А
рама закріплена напівзащемленою опорою,
в точці В – шарнірно нерухомою
опорою. На раму в точці К діє сила
циліндричним шарніром. В точці А
рама закріплена напівзащемленою опорою,
в точці В – шарнірно нерухомою
опорою. На раму в точці К діє сила
![]() кН,
кН,
![]() ,
в точці Н – сила
,
в точці Н – сила
![]() кН,
кН,
![]() на дільниці СК – розподілене
навантаження інтенсивністю
на дільниці СК – розподілене
навантаження інтенсивністю
![]() кН/м,
кН/м,
![]() кН/м,
на дільниці ВН діє пара сил з моментом
кН/м,
на дільниці ВН діє пара сил з моментом
![]() кН·м
(напрямленим за рухом годинникової
стрілки). Визначити реакції опор А,
В і зусилля в з’єднанні С.
кН·м
(напрямленим за рухом годинникової
стрілки). Визначити реакції опор А,
В і зусилля в з’єднанні С.
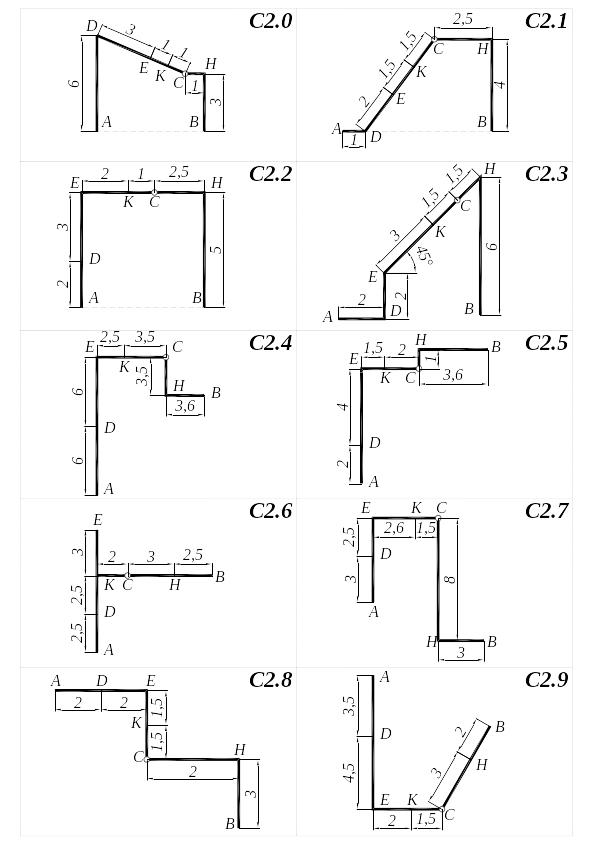
Рис. С2
Таблиця С2
№ рядка |
Типи опор в точках |
Тип з’єднання в точці С |
Сила
|
Сила
|
Розподілене навантаження |
Пара сил з моментом, М |
||||||||
А |
В |
точка при-кладання |
|
модуль сили, кН |
точка при-кладання |
|
модуль сили , кН |
дільни-ця |
модуль q, кН/м |
Тип |
точка при-кладання |
величина кН·м |
||
1 |
|
|
шарнір |
С |
45 |
7 |
D |
10 |
3 |
KE |
4 |
|
D |
-10 |
2 |
|
|
ковзна муфта |
C |
60 |
8 |
Е |
20 |
5 |
HB |
6 |
|
Е |
11 |
3 |
|
|
шарнір |
Е |
90 |
9 |
К |
30 |
7 |
DE |
q1=4 q2=6 |
|
H |
12 |
4 |
|
|
ковзна муфта |
К |
120 |
10 |
Н |
40 |
9 |
AD |
5 |
|
С |
-13 |
5 |
|
|
шарнір |
Н |
135 |
11 |
D |
50 |
11 |
EK |
8 |
|
Н |
-15 |
Продовження таблиці С2
№ рядка |
Типи опор в точках |
Тип з’єднання в точці С |
Сила
|
Сила
|
Розподілене навантаження |
Пара сил з моментом, М |
||||||||
А |
В |
точка при-кладання |
|
модуль сили, кН |
точка при-кладання |
|
модуль сили , кН |
дільни-ця |
модуль q, кН/м |
Тип |
точка при-кладання |
величина кН·м |
||
6 |
|
|
ковзна муфта |
D |
150 |
5 |
Е |
60 |
13 |
НC |
q1=5 q2=7 |
|
C |
9 |
7 |
|
|
шарнір |
D |
180 |
4 |
К |
70 |
15 |
АD |
7 |
|
D |
-8 |
8 |
|
|
ковзна муфта |
Е |
210 |
3 |
Н |
80 |
17 |
DЕ |
10 |
|
Е |
7 |
9 |
|
|
шарнір |
К |
225 |
12 |
D |
45 |
16 |
DE |
q1=6 q2=10 |
|
С |
-6 |
0 |
|
|
ковзна муфта |
Н |
240 |
6 |
Е |
90 |
14 |
СК |
9 |
|
С |
4 |
Розв’язання.
1. Розглядаємо окремо рівновагу тіл і . Розчленимо систему по шарніру С.
2. Вибираємо систему координат .
3.
Показуємо активні (задані) сили, що діють
на стрижень
і стрижень
.
Попередньо розкладаємо їх на складові
![]() і
і
![]() ,
модулі яких дорівнюють
,
модулі яких дорівнюють
![]() кН,
кН,
![]() кН,
кН,
![]() кН,
кН,
![]() кН.
кН.
Розподілене навантаження замінюємо рівнодійними. Для полегшення обчислень розбиваємо трапецію на прямокутник і трикутник. Модулі рівнодійних для них дорівнюють відповідно
![]() кН,
кН,
![]() кН.
кН.
Розкладаємо
сили
і
![]() на складові, проекції яких дорівнюють
на складові, проекції яких дорівнюють
![]() кН,
кН,
![]() кН,
кН,
![]() кН,
кН,
![]() кН.
кН.
4.
Відкидаємо в’язі і замінюємо їх реакціями
(рис. С2.2, С2.3). В точці
А
![]() і
і
![]() ,
в точці В
,
в точці В
![]() і
і
![]() ,
в шарнірі С
,
в шарнірі С
![]() ,
,
![]() .
.
5. На раму діє довільна плоска система сил. Для кожного стрижня можна скласти три рівняння рівноваги, а загальна кількість невідомих – шість. Отже система статично визначна.
6. Складаємо рівняння рівноваги:
Стрижень (рис. С2.2). Використаємо першу форму рівнянь рівноваги:
![]() ,
(1)
,
(1)
![]() ,
(2)
,
(2)
![]() .
(3)
.
(3)
Рис.
С2.2 Рис.
С2.3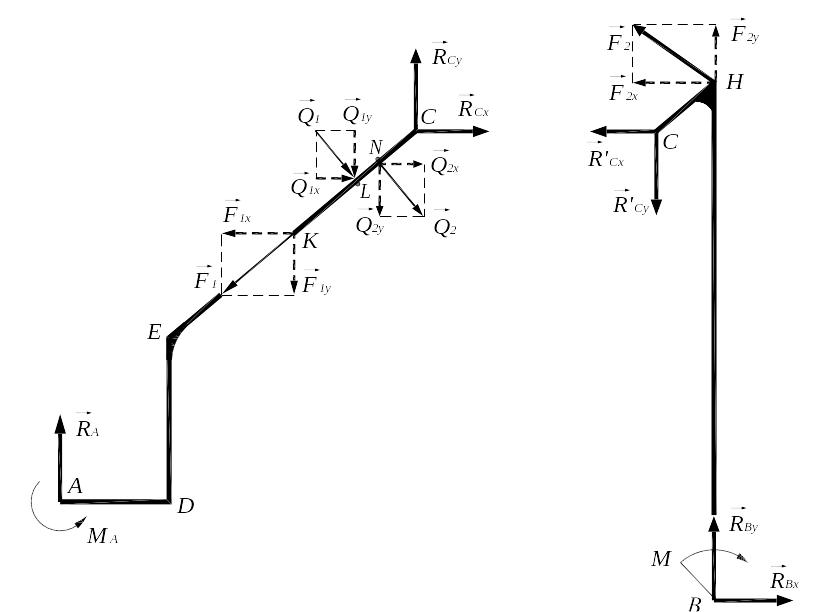
![]() ,
,
![]() ,
,
![]() .
.
Підставимо числові значення і отримаємо
![]() ,
,
![]() ,
(4)
,
(4)
![]() (5)
(5)
Стрижень
СНВ (рис. С2.3). Використаємо першу
форму рівнянь рівноваги. При цьому
врахуємо, що згідно з третім законом
механіки
![]() .
Маємо
.
Маємо
![]() ,
(6)
,
(6)
![]() ,
(7)
,
(7)
![]() (8)
(8)
З
рівнянь (6) (8),
поклавши
![]() ,
,
![]() ,
отримаємо
,
отримаємо
![]() ,
,
![]() ,
,
![]() .
.
Підставимо числові значення. Маємо
![]() ,
,
![]() ,
(9)
,
(9)
![]() (10)
(10)
Підставивши
значення
![]() в рівняння (10),
в рівняння (10),
![]() – в (9),
– в (9),
![]() – в (4), а
– в (4), а
![]() – в (5), отримаємо
– в (5), отримаємо
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Рис. С2.4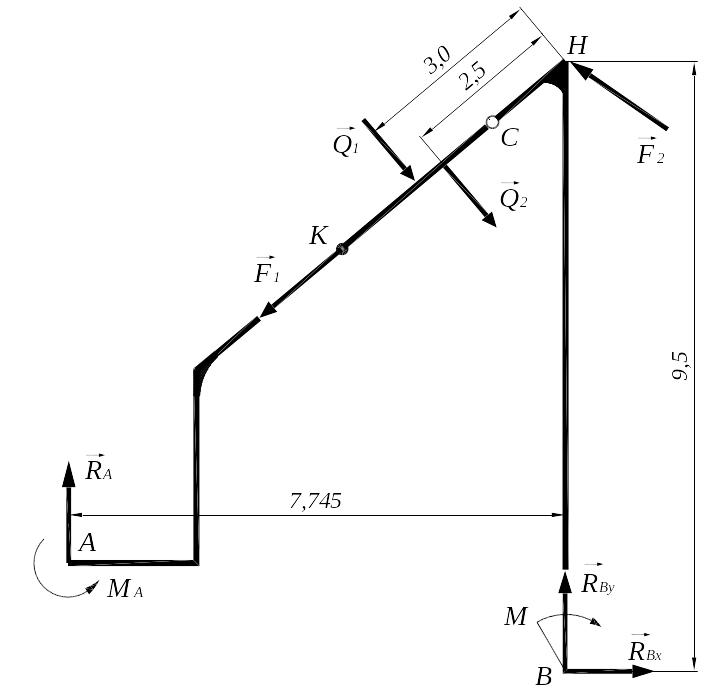
![]()
Оскільки у даному випадку легко обчислювати моменти всіх сил відносно точки С, то сили не розкладаємо на складові. Маємо

Відносна похибка
![]() .
.
Реакції визначені вірно.
8. Аналіз отриманих результатів.
Знак
“мінус” означає, що реакції
![]() і
і
![]() напрямлені в сторону, протилежну
показаній на рис. С2.3.
напрямлені в сторону, протилежну
показаній на рис. С2.3.
Визначимо рівнодійні зусилля в шарнірі С і в опорі В:
![]() кН,
кН,
![]() кН.
кН.
Відповідь:
![]() кН·м;
кН·м;
![]() кН;
кН;
![]() кН;
кН;
![]() кН.
кН.
Розглянемо один з варіантів використання прикладного математичного пакета серії Mathcad. Для розв’язку задачі скористаємось операторами Given та Find.
1. Задаємо вихідні дані та обнуляємо значення шуканих реакцій. Розмірності сил задано в кН, моменту – в кНм, величина кута – в рад.
F![]() 1x:=9.96 F2x:=7.37 Q1:=9 Q1x:=5.78 Q2x:=2.89 M:=8.5
1x:=9.96 F2x:=7.37 Q1:=9 Q1x:=5.78 Q2x:=2.89 M:=8.5
F1y:=8.36 F2y:=5.16 Q2:=4.5 Q1y:=6.89 Q2y:=3.45
RA:=0 MA:=0 RCx:=0 RCy:=0 RBx:=0 RBy:=0
RC:=0 RB:=0
2. Записуємо систему рівнянь рівноваги.
Given
Q2 + Q11.5 + MA – RA(2 + 6cos()) = 0
– F1x + Q1x + Q2x + RCx = 0
RA – F1y – Q1y – Q2y + RCy = 0
F2x1.5sin (a)+ F2y1.5cos(a) – M + RBy1.5×cos(a) + RBx×(9.5 – 1.5×cos(a)) = 0
– RCx –F2x + RBx = 0
– RCy + F2y + RBy = 0
3. Розв’язок системи рівнянь –
D:=Find(RA, MA, RCx, RCy, RBx, RBy)

4. Перевірка правильності визначення опорних реакцій.
Q21 + Q11.5 + D01 – D00(2 + 6×cos()) + F2x1.5sin() + F2y1.5cos() –
– M + D051.5×cos(a) + D04×(9.5 – 1.5×sin(a)) = – 1.279 10-13
5. Визначимо рівнодійні реакцій в шарнірі С та в опорі В –
![]()
![]()
Величини опорних реакцій, отриманих за допомогою Mathcad, збігаються з результатами аналітичного розв’язку.