

1 .Структурний аналіз механізму
Визначити степінь рухомості механізму за формулою Чебишева
![]()
де
![]() -
кількість рухомих ланок механізму;
-
кількість рухомих ланок механізму;
![]() -
кількість кінематичних пар 5-го класу;
-
кількість кінематичних пар 5-го класу;
![]() -
кількість кінематичних пар 4-го класу.
-
кількість кінематичних пар 4-го класу.
Визначити клас механізму. Клас механізму визначається за найвищим класом групи Ассура , що входить до складу механізму . Тому заданий механізм слід розкласти на групи Ассура .
2.Кінематичний аналіз механізму
Накреслити кінематичну схему механізму у вибраному масштабі довжин
 це спочатку у крайніх положеннях
(тонкими лініями), а потім у положенні,
яке матиме механізм , якщо кривошип
повернеться на заданий кут
це спочатку у крайніх положеннях
(тонкими лініями), а потім у положенні,
яке матиме механізм , якщо кривошип
повернеться на заданий кут
 у напрямі
від
одного з крайніх положень ( зображується
жирними лініями ) .
у напрямі
від
одного з крайніх положень ( зображується
жирними лініями ) .Побудувати план швидкостей для заданого кутом положення механізму у вибраному масштабі швидкостей .
Визначити величину та напрями швидкостей всіх заданих на кінематичній схемі механізму точок.
Визначити величину і напрям кутових швидкостей всіх ланок механізму
Побудувати план прискорень, задавшись масштабом прискорень
Визначити величину і напрям прискорень всіх точок механізму.
Визначити величину і напрям кутових прискорень всіх ланок механізму.
Таблиця 7. Данні до завдання 7
Параметри |
Варіант |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
|
0,02 |
0,025 |
0,03 |
0,035 |
0,04 |
0,045 |
0,04 |
0,03 |
0,045 |
0,045 |
|
0,065 |
0,13 |
0,16 |
0,15 |
0,2 |
0,21 |
0,18 |
0,18 |
0,15 |
0,155 |
|
0,08 |
0,09 |
0,1 |
0,08 |
0,1 |
0,11 |
0,1 |
0,12 |
0,12 |
0,09 |
|
0,006 |
0,01 |
0,02 |
0,015 |
0,03 |
0,02 |
0,015 |
0,02 |
0,02 |
0,025 |
|
0,01 |
0,014 |
0,015 |
0,016 |
0,02 |
0,015 |
0,018 |
0,02 |
0,017 |
0,02 |
|
0,06 |
0,12 |
0,13 |
0,12 |
0,2 |
0,2 |
0,17 |
0,17 |
0,15 |
0,14 |
|
300 |
280 |
260 |
240 |
220 |
200 |
180 |
160 |
140 |
120 |
|
30 |
45 |
60 |
75 |
330 |
120 |
150 |
300 |
210 |
240 |
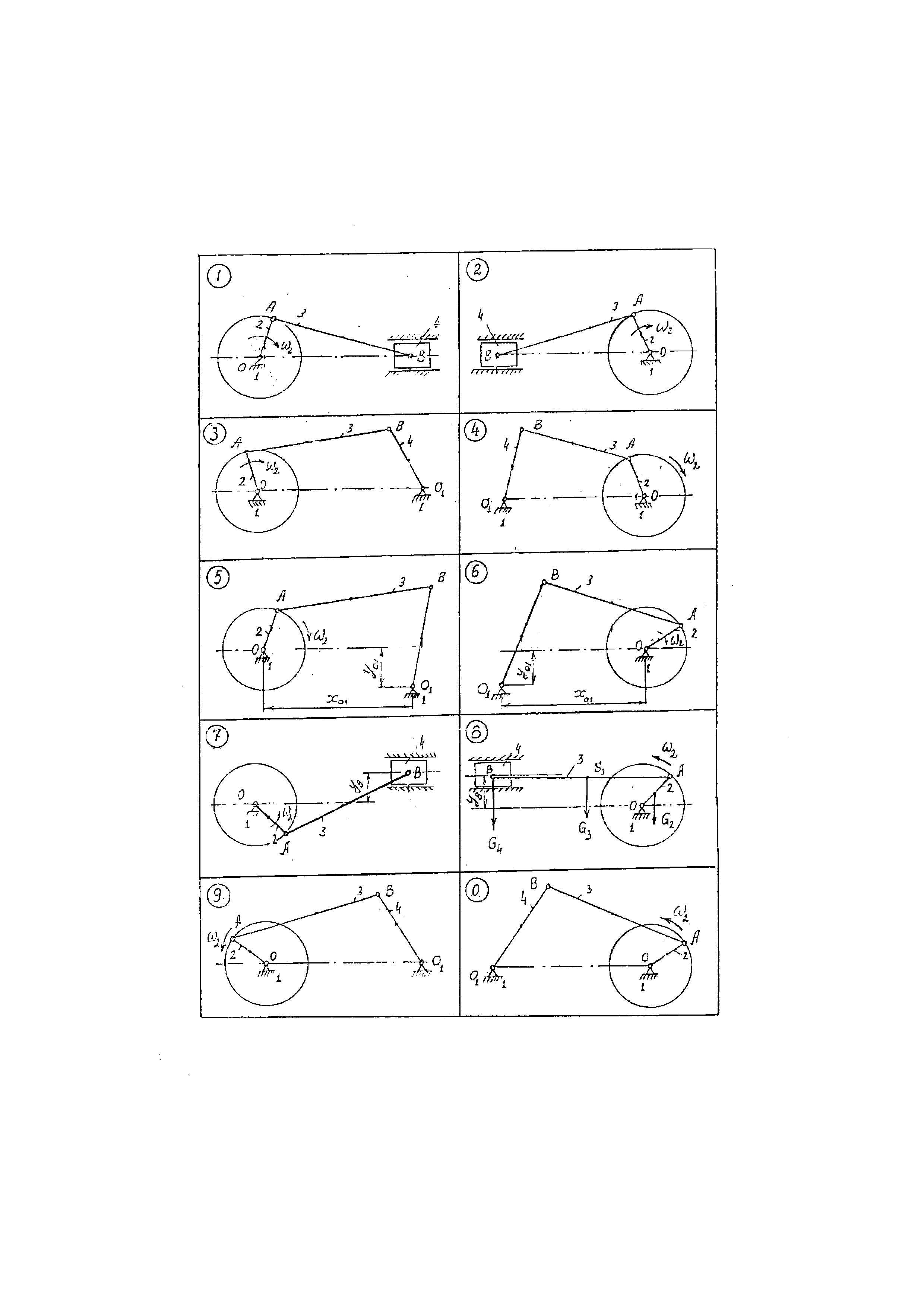
Рис.7
Для шарнірного четирехзвенника виконати:
1) структурний аналіз;
2) кінематичний аналіз:
Для заданого положення механізму побудувати
а) план швидкостей
б) план прискорень
Дано:
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Число
обертів кривошипа
![]()
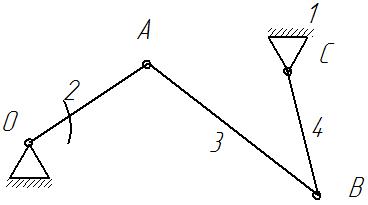
Виконуємо структурний аналіз плоского механізму - шарнірного четирехзвенника. Ведучою ланкою прийняти кривошип 2
1
Рис. 7.1
а) б)
1
Рис. 7.2
Для плоских механізмів використовуємо формулу Чебишева П.Л.
До складу механізму входять три рухливих ланки і чотири пари V класу: О (1,2), А (2,3), В (3,4) і С (4,1)
Ступінь рухливості дорівнює
![]()
Отже, у механізмі має бути одна ведуча ланка (кривошип 2), яка разом із стояком 1 утворює механізм 1 класу (рис. 7,2, а). Ланки 3 і 4 (рис. 7,2, б) утворюють структурну групу ІІ класу, ІІ порядку, 1 виду. Це механізм ІІ класу, тому що найвищий клас структурної групи, яка входить до його складу, другий. Послідовність побудови механізму можна виразити формулою побудови
![]()
У цій формулі римськими цифрами позначений клас механізму (І) або клас групи (ІІ), а арабськими цифрами - номери рухомих ланок, які входять до їх складу.
2) Виконуємо кінематичний аналіз
Приймаються
масштаб довжин
![]() м/мм і визначаємо довжини ланок механізму:
м/мм і визначаємо довжини ланок механізму:
![]() мм,
мм,
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
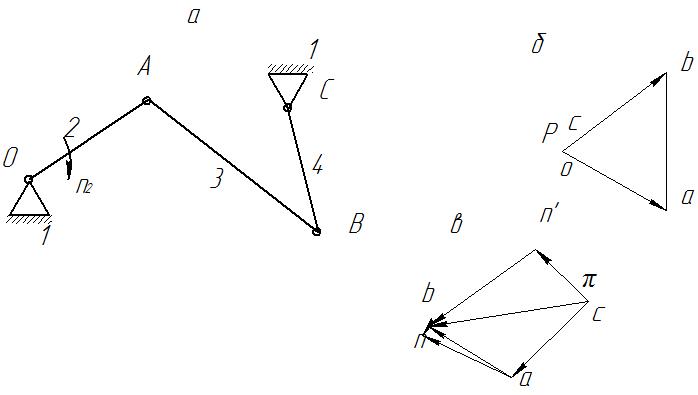
Рис. 7.3
Будуємо план швидкостей по векторним рівнянням
![]()
![]()
Кутова
швидкість кривошипа
![]()
Обираємо
масштаб плану швидкостей, прийнявши
довжину
![]() ,
тобто план будуємо в масштабі кривошипа
,
тобто план будуємо в масштабі кривошипа
![]()
План швидкостей представлений на рис. 7.3б
Будуємо
план прискорень (те ж в масштабі кривошипа,
тобто
![]() )
)
Прискорення
точки
![]()
Векторні рівняння, за якими будуємо план прискорень:
![]()
![]()


Відрізки
на плані прискорень, відповідні
прискоренням

План швидкостей представлений на рис. 7.3 в
ДЛЯ КРИВОШИПНО-ПОВЗУННОГО МЕХАНІЗМУ ВИКОНАТИ:
1) структурний аналіз;
2) кінематичний аналіз:
а) побудувати план швидкостей для заданого положення механізму
б) побудувати план прискорень для заданого положення механізму
Дано:
![]() ;
;
![]() .
.
Кутова
швидкість кривошипа АВ постійна і
дорівнює
![]() .
Положення механізму визначається кутом
.
Положення механізму визначається кутом
![]()
1) Виконуємо структурний аналіз плоского кривошипно - повзунного механізму.
Для плоских механізмів використовуємо формулу Чебишева П.Л.
Рис. 7.3
У
кривошипно - повзунному механізмі три
рухливі ланки (![]() ):
кривошип АВ, шатун АВ, повзун С.
):
кривошип АВ, шатун АВ, повзун С.
Ці ланки
утворюють чотири пари V класу, причому
пари А (4,1), В (1,2), С (2,3) - обертові і С (3,4)
- поступальні. Тоді ступінь рухливості
механізму дорівнює
![]()
Отже в цьому механізмі має бать одне провідне ланка.
Ведуча ланка і стояк, які утворюють пару V класу, називає механізмом І класу (рис.7.4, а)
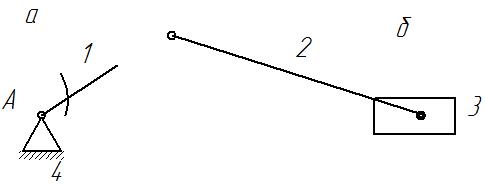
Рис. 7.4
Ланки 2 і 3 утворюють структурну групу ІІ класу, ІІ порядку, 2 види. В цілому це механізм ІІ класу, тому що найвищий клас структурної групи, яка входить до його складу, - другий
Послідовність побудови механізму можна виразити формулою
![]()
У цій формулі римськими цифрами позначений клас механізму (І) і клас групи (II), а арабськими цифрами - номери рухомих ланок, які входять до його складу.
2) Виконуємо кінематичний аналіз
Приймаємо
масштаб креслення
![]() м/мм та будуємо схему механізму (рис.
7.5,а).
м/мм та будуємо схему механізму (рис.
7.5,а).
Довжини
відрізків на кресленні будуть:
![]() мм,
мм,
![]() мм.
мм.
Рис. 7.5
Будуємо
план швидкостей механізму в масштабі
кривошипу, тоді його масштаб
![]() Побудову
виконуємо згідно формулам
Побудову
виконуємо згідно формулам
![]()
На цьому
плані відрізок
![]() ,
що зображує швидкість
,
що зображує швидкість
![]() точки В, буде дорівнювати
точки В, буде дорівнювати
![]() (рис.7.5,б)
(рис.7.5,б)
Будуємо
план прискорень (те ж в масштабі кривошипа,
тобто
![]() )
)
Побудову виконуємо згідно з рівностями :
![]()
На цьому
плані відрізок
![]() ,
що зображує вектор нормального прискорення
точки В, буде дорівнювати
,
що зображує вектор нормального прискорення
точки В, буде дорівнювати
![]() .
Відрізок
.
Відрізок
![]() ,
що зображує на плані нормальне прискорення
,
що зображує на плані нормальне прискорення
![]() точки С у обертальному русі ланки ВС
відносно точки В, надається із рівності
точки С у обертальному русі ланки ВС
відносно точки В, надається із рівності
![]()
Де
![]() мм-відрізок,
що зображує швидкість точки С в обертанні
ланки ВС відносно точки В.
мм-відрізок,
що зображує швидкість точки С в обертанні
ланки ВС відносно точки В.