

Лекция № 3 Обработка данных в канале Переменные канала
Переменные являются основными атрибутами канала. Такими переменными являются входное (In), Аппаратное (А), реальное (R) и выходное (Q) значения канала.
Входное значение для канала типа Input формируется:
данными от внешних источников (УСО, контроллеров, удаленных узлов);
системными данными, значениями других каналов;
Для канала типа Output:
процедурой управления этого канала;
процедурой управления или трансляции других каналов;
метапрограммой, работающей в отдельном потоке;
оператором с помощью управляющих графических мнемосхем.
Если источником данных для канала типа Input является УСО, то канал имеет подтип АНАЛОГ и представляет собой цифровой код, эквивалентный коду, сформированному на выходе АЦП при подачи на АЦП аналогового унифицированного сигнала. Величина этого кода зависит от размерности АЦП и величины унифицированного сигнала.
ПРИМЕР:
На входе АЦП контроллера подключен унифицированный сигнал 0¸10 В. Размерность АЦП – 12 разрядов. Тогда 0 В соответствует коду In = 0, а 10 В – коду In = 4095.
Аппаратное значение у каналов типа Input с представлением FLOAT формируется из входного процедурой масштабирования, а с представлением HEX – процедурой логическая обработка.
У каналов типа Output независимо от вида представления аппаратное значение получается из реального процедурой трансляция. Для удобства аппаратные значения каналов, которые получают и передают данные из УСО формируют в величинах унифицированных сигналов (4¸20, 0¸20 mA, 0¸5,0¸10 В и т. д.).
Реальные значения формируются из аппаратных процедурами трансляция и фильтрация, для каналов Input, для каналов Output – фильтрацией.
Выходные значения определены только для каналов Output. Формируются из аппаратных для значений с представлением FLOAT процедурой масштабирования, с представлением HEX – логической обработкой.
Выходные значения для каналов, которые передают управляющие сигналы в УСО должны представлять собой цифровой код, эквивалентный выходному унифицированному сигналу в соответствии с размерностью ЦАП.
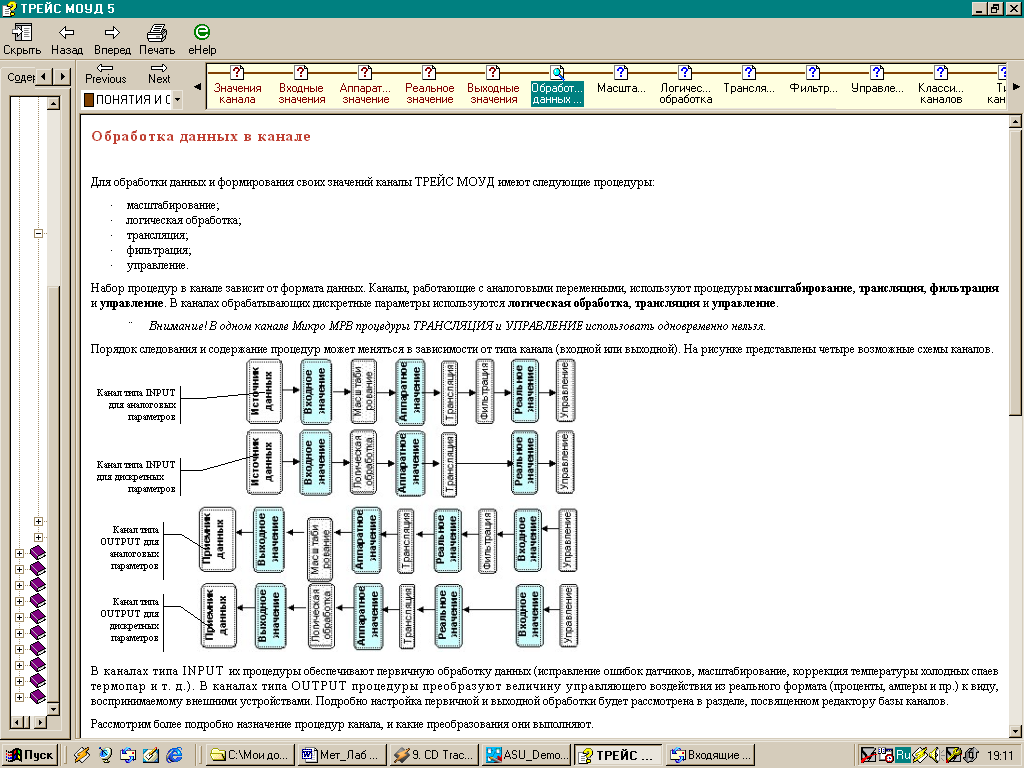
Процедуры обработки данных в канале
Для обработки данных в канале и формирования переменных каналов используются следующие процедуры для каналов с представлением FLOAT: масштабирование, трансляция фильтрация и управление. Для каналов HEX – трансляция, логическая обработка и управление.
Различают первичную и выходную обработку каналов. Первичная предназначена для исправления ошибок датчиков, масштабирования, коррекции температуры холодных спаев, фильтрации помех и т.д., выходная – для реализации требуемого управления, защиты оборудования от возможных перегрузок при резких изменениях величины управляющего воздействия. На рис. Показана последовательность процедур при первичной и выходной обработке.
Масштабирование - включает в себя 2 операции – умножение и смещение (дрейф нуля).
Для каналов типа Input входное значение сначала умножается, а затем к полученному результату добавляется величина смещения. Результатом является аппаратное значение.
A = In×K+d, (1)
где K – множитель; d – величина смещения.
Для каналов типа Output - к аппаратному значению сначала прибавляется величина смещения, а затем происходит умножение на коэффициент. Результатом является выходное значение. (Для каналов с подтипом АНАЛОГ это десятичный код, который в ЦАП УСО устанавливает соответствующие разряды равными 1).
Q = K×(A+d).
ПРИМЕР:
На вход контроллера поступает токовый сигнал в 17 mA. Размерность АЦП составляет 12 разрядов. Диапазон унифицированного сигнала 4¸20 mA. Найти величину смещения и дрейфа нуля.
Для этого надо решить простую систему линейных уравнений.
Т.к. 4 mA соответствует цифровому коду о, а 20 mA – коду 4095 (для размерности АЦП равной 12), то подставив эти значения в уравнение (1) и решив систему уравнений относительно неизвестных коэффициентов получим, что К = 0,0039, а d = 4.
Трансляция – определена для всех каналов. Для каналов Input с помощью этой процедуры аппаратное значение преобразуется в реальное, Для Output – наоборот. Процедура трансляции вызывает программу, написанную на языке функциональных блоков.
Рассмотрим пример подключения программы трансляции. Измеряемая величина показывает моментальный расход жидкости. Для расчета технико-экономических показателей необходимо определить весь объем жидкости, прошедший через трубопровод.
Получим аппаратное значение эквивалентное измеряемому расходу, настроив коэффициенты масштабирования и смещения.
Создадим программу, которая рассчитывает, которая выполняет функцию интегрирования во времени значения моментального расхода.
Установим разработанную программу в качестве процедуры трансляции.
Фильтрация – ограничение величины управления, ограничение скорости изменения, сглаживание, апертура.