

4 Механизм передвижения крана
4.1 Выбор схемы механизма передвижения
Механизм передвижения крана выбираем с раздельными приводами, кинематическая схема которого представлена на рисунок 6. Электродвигатель, соединенный муфтой с редуктором, передает движения на ведущие колеса. Вал приводного колеса соединен с тихоходным валом редуктора промежуточным валом и зубчатыми муфтами. На полумуфте быстроходного вала редуктора установлен тормоз.
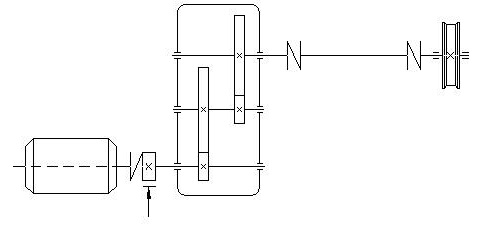
Рисунок 6 – Кинематическая схема механизма передвижения крана
По графику (рисунок 7) общий вес крана (грузоподъемностью 50000 Н, пролетом 30 м при ПВ=25%) приближенно составит Gк=300000 Н. Предварительно принимаем диаметр ходовых колес Dк=500 мм (прил. LIX, LVI [1]). Колеса стальные (материал – сталь 65Г, твердость поверхности катания HB 320…350) двухребордные с цилиндрическим ободом, ширина поверхности катания b=100 мм (ГОСТ 3569-74). Рельс типа КР со скругленной головкой. Диаметром цапфы вала d=100 мм. Колеса установлены на роликовых подшипниках, f=0,015. Коэффициент kр=1,5 (табл. 28 [2]). Коэффициент трения качения =0,06 см (табл. 27 [2]).
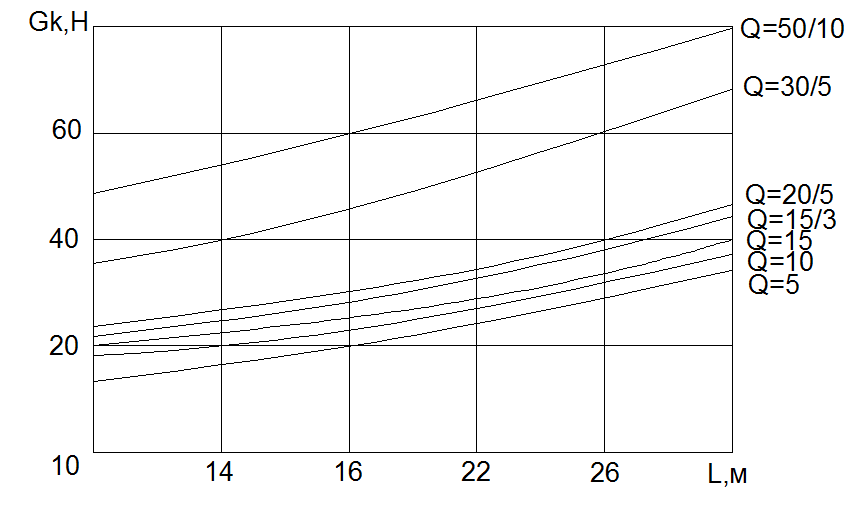
Рисунок 7 – Общий вес крана в зависимости от грузоподъемности Q и длины пролета L
Сопротивление
передвижению м оста
с краном с номинальным грузом, приведенное
к ободу ходового колеса
,
Н, определяют по формуле
оста
с краном с номинальным грузом, приведенное
к ободу ходового колеса
,
Н, определяют по формуле
 ,
(57)
,
(57)
 Н
Н
4.1.1 Расчет мощности двигателя и выбор редуктора
Максимальное
ускорение моста
 ,
м/c2,
для обеспечения запаса сцепления kсц=1,2
при пуске незагруженного крана ускорение
его должно быть не более
,
м/c2,
для обеспечения запаса сцепления kсц=1,2
при пуске незагруженного крана ускорение
его должно быть не более
 ,
(58)
,
(58)
где nпр- число приводных колес;
nк- общее число колес моста.
 м/c2
м/c2
Наиболее неблагоприятный случай разгона незагруженного крана будет тогда, когда тележка находится в крайнем положении моста со стороны кабины (опора B). При таком положении тележки менее загруженными являются ходовые колеса левой опоры A (рис. 48). При пуске приводов не должно происходить пробуксовки приводных колес опоры А по рельсам.
Нагрузки на ходовые колеса опор А и В:
 ;
(59)
;
(59)
 ,
(60)
,
(60)
где Gм- вес моста;
Gт- вес тележки;
Gк- вес кабины с электрооборудованием.
 Н
Н
 Н
Н
Для
предварительного выбора двигателя
определяем сопротивление передвижению
загруженного крана
 ,
Н, определяют по формуле
,
Н, определяют по формуле
 ,
(61)
,
(61)
где a- среднее ускорение крана при пуске, принимаем a=0,2 м/с2 (таблица 29 [1])
 Н
Н
Мощность электродвигателя , кВт, определяем с учетом инерционных нагрузок по формуле
 ,
(62)
,
(62)
 кВт
кВт
Мощность одного двигателя раздельного привода , кВт, определяют по формуле
 ,
,
 (63)
(63)
 кВт
кВт
По
каталогу (прил. XXXIV
[1]) выбираем электродвигатель с фазовым
ротором типа MTF
111-6 мощностью N=4,1
кВт (при ПВ-25%), n=870
мин-1
(=
91,06 рад/с), Мп.max=87
Н·м, Ми=42,9
Н·м,
 ,Jр=0,0496
Н·м·с2.
,Jр=0,0496
Н·м·с2.
Частота вращения колеса , мин-1 определяют по формуле
 ,
(64)
,
(64)
 мин-1
мин-1
Расчетное
передаточное число редуктора
 ,
определяют по формуле
,
определяют по формуле
 ,
(65)
,
(65)
Расчетная
мощность редуктора
 ,
кВт, определяют по формуле
,
кВт, определяют по формуле
 ,
(66)
,
(66)
 кВт
кВт
 кВт
кВт
По каталогу (прил. XLI…XLVI [1]) выбираем редукторы типа Ц2-250-24,9-2Ц и Ц2-250-24,9-5Ц.
При выбранном редукторе:
Фактическая частота вращения колеса , мин-1, определяют по формуле
, (67)
 мин-1
мин-1
Фактическая
скорость передвижения крана
 ,
м/с, с номинальным грузом определяют по
формуле
,
м/с, с номинальным грузом определяют по
формуле
 ,
(68)
,
(68)
 м/с
м/с
Время пуска , с, при максимальном ускорении определяют по формуле
 ,
(69)
,
(69)
 с
с