93. Інтерфейс wi Max.
Технологія безпровідного зв’язку Wi Max – це комерційна назва стандарту IEEE 802.16a, заявленого в січні 2003р.
Третя версія стандарту IEEE 802.16a використовує «нищий» діапазон частот від 2 до 11 Г Гц, збільшена дальність зв’язку до 50 км. Зв’язок здійснюється і не в межах прямої видимості але знижена швидкість передачі до 75 Мбіт/с.
Інтерфейс Wi Max розроблявся для організації роботи безпровідних мереж, що охоплюють великі міста, регіони (стандарт MAN).
По етр-рі ці інтерфейси дуже подібні на стандарт мережі стільникового зв’язку. Для Wi Max також необхідні базові станції.
Т. ч. інтерфейси Wi Max і Wi Fi взаємно доповнюють один одного: Wi Fi – в локальних мережах всередині приміщень або на невеликих відкритих площадках, а Wi Max – для організацій більш глобального зв’язку в регіоні, місті.
По нових проектах споживач в приміщені працює по Wi Fi, а вийшовши – автоматично переходить на протокол Wi Max.
Сьогоднішня ера знаменує кардинальним оновленням інтерфейсів. Фірма Intel майже всі порти (COM, LPT, PS/2) і паралельні інтерфейси (ISA, PC, IDE – ATA) замінює на швидкісні послідовні. Вже є системні плати лише з інтерфейсами USB, а скоро – лише Serial ATA або PCI Express. А зв’язок із зовнішніми пристроями, а тим більше локальними і портативними мережами, буде виключно безпровідним.
94. Синхронний та асинхронний sr-тригери.
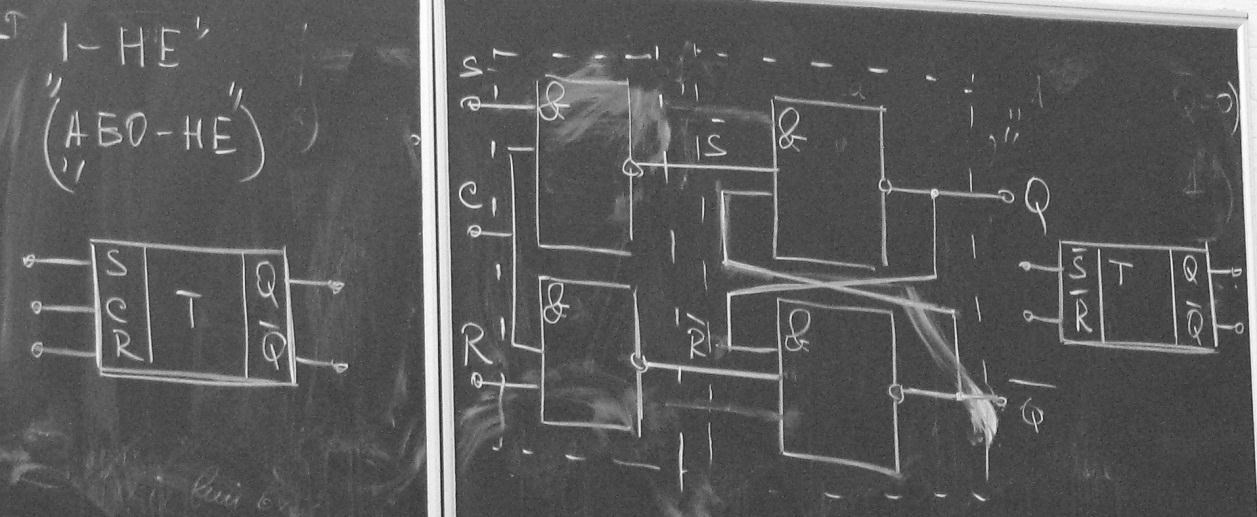
Асинхронний SR-тригер складається з двох комірок типу «І-НЕ»(«АБО-НЕ») замкнутих у кільце і є по суті елементарною коміркою без додаткового логічного пристрою.
Переключення SR-тритера відбувається сигналом 0, що подаються на входи S і R.
Синхронний SR-тригер містить ще й логічний пристрій з двох комірок «І-НЕ».
Переключення цього сигналу в ____, що подається на входи ____, але лише при наявності синхросигналу на вхід ЦЕ.
JK-тригер. Виконується по двохступінчастій структурі, що складається з двох синхронних SRтригерів і двох логічних схем «І-НЕ». Для цієї схеми S1=JQ і R1=KQ. Якщо J рівне одиниці і K рівне нулю, то при J рівне нулю S1 рівне одиниці. І після закінчення першого тактового імпульсу на вході C тригер встановлюється в стан Q=1.
Якщо J=1 і K=0,то при Q=1 обидва вхідних сигнали тригера першої ступені S1 і R1 будуть рівні нулю. І відповідно весь двохступеневий тригер не буде змінювати свого стану при приході синхроімпульса на вхід ЦЕ. Таким чином при J=1 і K=0 вихід тригера QN=1. Якщо QMN1 0 або 1 подібним чином по відношенню до стану Q0діє сигнал K 0 при J 0. Якщо ж J K 1то отримаємо S1 1 і R1 1. При Q0або S1 0 ____ при Q1. В наслідок цього при J K 1 тригер переключиться в протилежний стан при відповідному фронту сигналу на вході C .
95. Асинхронний сумуючий лічильник.
Асинхронний сумуючий лічильник виконують на тригерах довільного типу. Переважно використовують JK або D-тригери в лічильному режимі.
Найпростіший чотирьох розрядний лічильник на D-тригерах скадаєтсья із з’єднаних послідовно чотирьох лічильних тригерів таким чином щоб вихід кожного тригера з’єднаний з входом наступного. При надходженні лічильних імпульсів на вхід C тригери будуть змінювати свій стан. Для преведення лічильника у початковий стан використовуються сигнал скидання R, що поступає одночасно на всі входи R тригерів.
– схема асинхронного сумуючого лічильника.
Для побудови асинхронного реверсивного лічильника, який може функціонувати в режимі віднімання достатньо замінити виходи _____. В цьому випадку при надходження імпульсу скидання R на всіх виходах лічильника встановляться одиничні рівні. А при надходженні лічильників на вхід ЦЕ1 тригери лічильника будуть змінювати свої стани.
Для побудови асинхронного реверсивного лічильника можна за допомогою логічної схеми забезпечити подачу сигналів з інверсного виходу Q при сумуванні або з прямого виходу Q при відніманні від попереднього тригера на лічильний вхід наступного тригера.
96. JK-тригери.
Має 2 інформаційні входи: J і K. Подібно
до SR-тригера це входи, установки тритера
в стан 1 або 0. 
97. D-тригер.

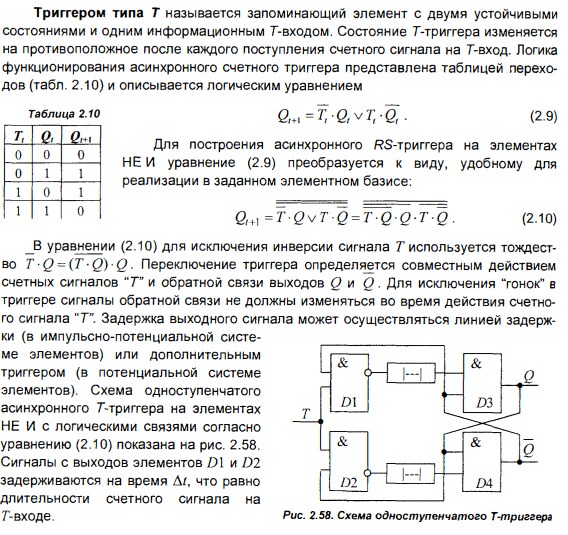
98.T-тригер.