

Санкт-Петербургский Государственный Политехнический университет
Институт информационных технологий и управления
Кафедра «Информационные управляющие системы»
Курсовой проект
“Моделирование процесса параметрической идентификации динамического объекта”
По дисциплине: математические модели
Вариант №7.
Выполнил:
студент группы 23504/21
Груздев К. С.
Преподаватель:
Леонтьева Т. В.
Санкт-Петербург
2013 год
Исходные
данные:







Часть 1. Преобразование формулы и решение ее с помощью Метода Эйлера

Перейдём в вещественную форму:





Обозначим:



Получим систему уравнений в канонической форме:



Далее решаем систему методом Эйлера


А также, на каждом шаге подставив полученные значения, рассчитываем

Выберем шаг h=0.5, выполним необходимые вычисления и построим график функции.
Полученный график представлен на рис.1. По графику видно, что функция
y(t)-> к числу чуть больше 0. А выходит она из точки ~ -1500. Узнаем точные значения этих точек. Для этого вычислим пределы:
 = 30
= 30
 = -1500
= -1500
Некоторые значения y представлена в таблице 1 “ Зависимость значения функции от времени”.
Наилучший период наблюдения t=1...300, шаг h=0.5.
Взято 300 точек, т.к. уже на этом периоде наблюдения видно как график функции сходится к положительному числу около 0. График функции искажается при шаге больше 0.5 (при шаге больше 0,8 - расходится). А при меньшем шаге сходимость получим за большее число шагов. Поэтому выбран шаг h=0.5.
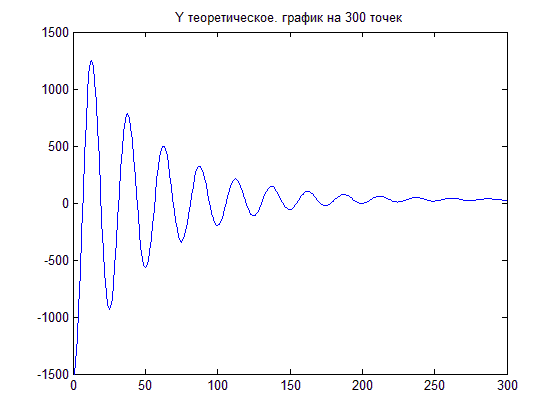
(рис.1)
Таблица 1
“Зависимость значения функции от времени”
t |
y(t) |
1 |
-1500 |
11 |
1130,33569982263 |
21 |
-407,472269924090 |
31 |
-131,811172218857 |
41 |
546,368398013440 |
51 |
-554,815355895296 |
61 |
465,038634809155 |
71 |
-156,677691301819 |
81 |
-15,5099285734393 |
91 |
218,653161918972 |
101 |
-192,944828877209 |
111 |
201,440561416127 |
121 |
-48,6973993327229 |
131 |
18,9739612829796 |
141 |
98,5444137678508 |
151 |
-54,7630972652742 |
161 |
97,3519023534570 |
171 |
-2,84302221765938 |
181 |
28,2615453956948 |
191 |
54,7510635292838 |
201 |
-2,13806225774806 |
211 |
56,3810973500383 |
221 |
16,4104765802804 |
231 |
30,2954912892119 |
241 |
38,8749721864901 |
251 |
17,8493005972232 |
261 |
40,3035993332771 |
271 |
24,4184897222613 |
281 |
30,4841608516322 |
291 |
33,1566814566145 |
Часть 2. Моделирование метода оптимизации. Метод покоординатного спуска
Описание метода поиска
Метод
предназначен для нахождения экстремума
(минимума) функции
 ,
,
но
в нашем случае:
 .
.
Задается начальная точка
 ,
отличная от точки минимума. Задаются
точность (E)
и шаг (h).
,
отличная от точки минимума. Задаются
точность (E)
и шаг (h).
Далее выбираем координату (направление), по которой будем двигаться по функции:

а все остальные координаты фиксируем. И ищем минимальное значение функции как функцию одной переменной (Х1)

В случае если новое значение функции больше предыдущего, то меняем шаг на противоположный (h = -h).
Когда находим значение координаты, при котором значение функции минимально, то выбираем другую координату, по которой будем двигаться по функции:

а все остальные координаты снова фиксируем.
Выбор остановки задан 4 условиями:


Число обращений (итераций)
k(f) > kmax
В данном случае я использовал 2 и 4 условия, т. к. 3 условие не подходит из-за того, что шаг постоянный, а 1 условие – затрачивает больше ресурсов.