

3.3. Методика расчета кинематики бесступенчатого привода подач станков с чпу
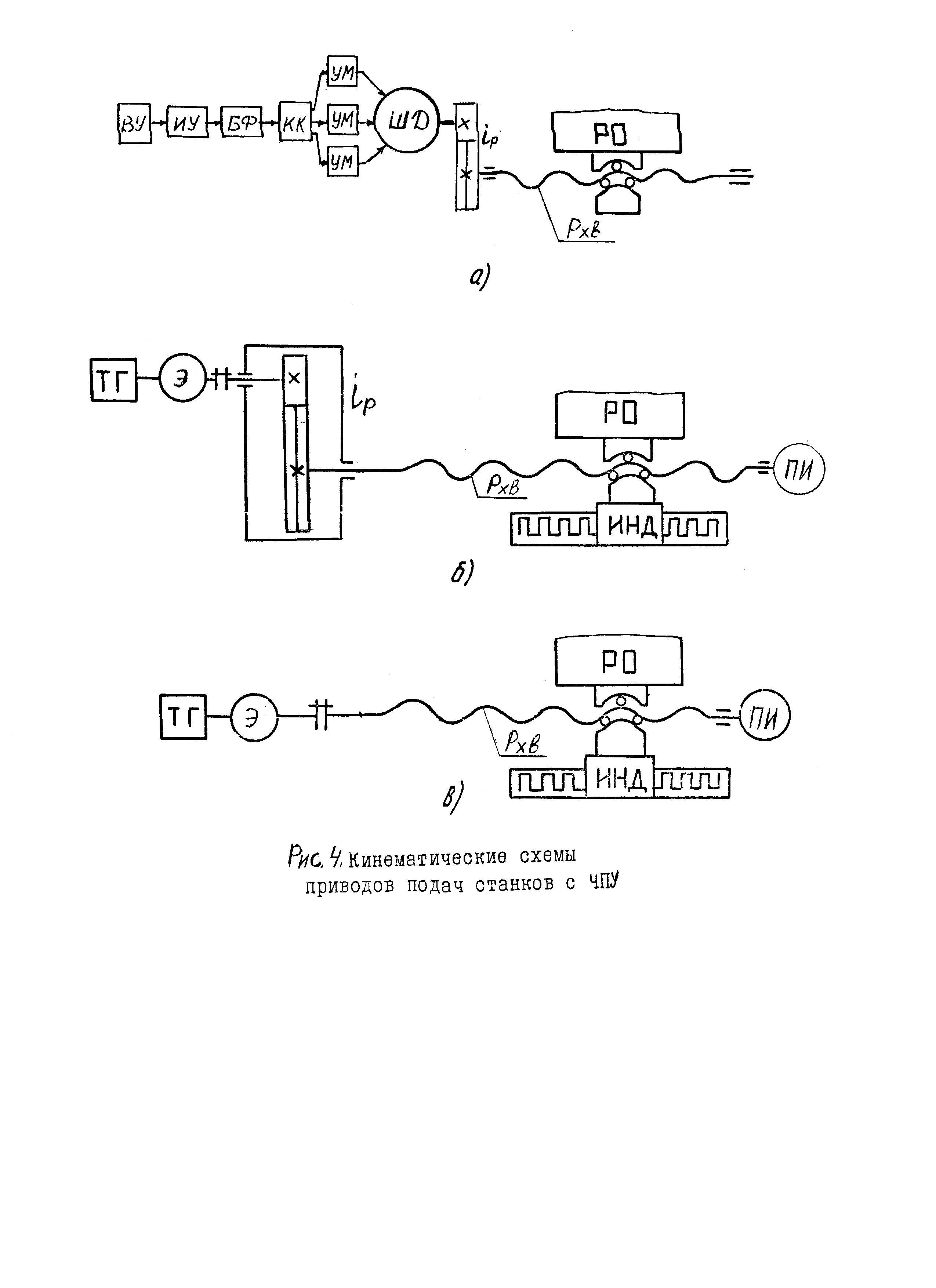
В существующих станках используются приводы от шагового электродвигателя (рис.4а), следящие приводы от высокомоментного двигателя (ПБВ) и вентильного электродвигателя переменного тока (рис.4б, 4в).
В приводе подач от шагового электродвигателя (ШД) преобразователь измерительный (ПИ) отсутствует (рис. 4а). Точность позиционирования определяется погрешностями отработки ШД командных импульсов, а также зазорами и упругими деформациями кинематической цепи от двигателя до рабочего органа (РО – стола, суппорта). Шаговые приводы применяются в маломощных токарных и фрезерных станках. На рис. 4а приведена функциональная блок-схема управления шаговым электродвигателем ШД.
Из вычислительного устройства программный сигнал поступает в импульсный усилитель (ИУ), где усиливается и поступает в блок формирования (БФ), где формируется в прямоугольные импульсы. Далее сигнал поступает в кольцевой коммутатор (КК), который поочерёдно коммутирует статорные обмотки ШД сигналами, усиленными в усилителях мощности (УМ).
Более высокую точность обеспечивают высокомоментные и вентильные электроприводы переменного тока. Тахогенератор (ТГ), установленный на валу электродвигателя, является датчиком (ПИ) обратной связи по скорости.
Датчиком (положения) обратной связи по пути является круговой датчик типа вращающегося трансформатора (редусин) и (или) линейный датчик индуктосин (ИНД).
3.3.1. Методика расчета кинематики привода с шаговым электродвигателем
1) Определяется цена импульса.
Шаговый привод на каждый программный
импульс отрабатывает перемещение
![]() :
:
![]() ;
мм, (13)
;
мм, (13)
где Vs – скорость подачи (Vsmin или Vsmax) мм/мин,
f - частота импульсов, поступающих на обмотку ШД (Гц).
2) Определяется передаточное отношение между ШД и винтом подачи.
Уравнение кинематического баланса цепи привода имеет вид:
1имп .
![]() (14)
(14)
где u – угол поворота якоря ШД на один импульс (1.50),
![]() - передаточное отношение между ШД и
винтом подачи (зубчатая пара колес),
- передаточное отношение между ШД и
винтом подачи (зубчатая пара колес),
Рхв – шаг винта подачи (2.5 мм.; 5 мм.).
Шагом винта подачи задаются из конструктивных соображений.
Определяется неизвестное из уравнения:
![]() (15)
(15)
По полученному подбираются числа зубьев зубчатых колес.
3.3.2. Методика расчета кинематики привода подач с вентильным
электродвигателем
1) Определяются предельные подачи Usmin и Usmax из режимов резания с учетом данных современных станков.
2) Определяется мощность привода подач:
![]() (16)
(16)
где Р – мощность привода подач, кВт;
Q – тяговая сила, Н;
Vs – скорость подачи с тяговой силой Q, мм/мин.
Для суппортов токарных станков с комбинированными направляющими
Q
=
![]() .
.
Для суппортов и столов с прямоугольными направляющими:
Q
=
![]() ,
,
где Рх, Ру, Рz – составляющие силы резания, Н;
G – сила от веса перемещаемого узла, Н;
![]() - приведенный коэффициент трения для
направляющих:
- приведенный коэффициент трения для
направляющих:
скольжения =0.10–0.18; качения =0.003-0.005.
К – коэффициент, учитывающий опрокидывающий момент, К = 1.15 - 1.4.
3) Выбирается электропривод по каталогу электроприводов.
4) Выбирается шаг ходового винта из стандартного ряда – 5 мм, 10 мм, 20 мм.
5) Вычисляется передаточное отношение редуктора из уравнения кинематического баланса:
![]() (17)
(17)
Откуда
![]() (18)
(18)
где
![]() - минимальная частота вращения вала
электродвигателя.
- минимальная частота вращения вала
электродвигателя.
При
![]() применяется кинематическая схема (рис
4в).
применяется кинематическая схема (рис
4в).
6) Вычисляется максимальная подача
![]() ,
обеспечиваемая данным приводом:
,
обеспечиваемая данным приводом:
![]() (19)
(19)
7) Сравнивается
с заданной
![]() .
Если
<
,
то корректируют
или
.
Если
<
,
то корректируют
или
![]() или выбирают другой электропривод.
или выбирают другой электропривод.
8) Определяют числа зубьев зубчатых колес редуктора.
9) Приступают к разработке чертежей проекта. Начинать рекомендуется с листа продольного разреза (см. приложения ).