

3.3. Примеры статических и астатических систем
Как уже отмечалось, статизм автоматических систем определяется их внутренней структурой, поэтому попробуем разобраться в причинах, вызывающих эти свойства, и сделаем это на примерах систем стабилизации. В качестве объектов регулирования в этих системах использованы машины постоянного тока независимого возбуждения.
3.3.1. Автоматические системы стабилизации напряжения
1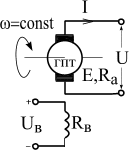 .
Объект регулирования (рис.3.2).
Объектом
регулирования является генератор
постоянного тока, для которого справедливо
уравнение
.
Объект регулирования (рис.3.2).
Объектом
регулирования является генератор
постоянного тока, для которого справедливо
уравнение
![]() ,
,
где
![]() –
активное сопротивление цепи якоря.
Зависимость
–
активное сопротивление цепи якоря.
Зависимость
![]() называется внешней характеристикой
генератора и
является
одной из его статических характеристик.
Согласно (3.4) статизм этой характеристики
больше нуля
называется внешней характеристикой
генератора и
является
одной из его статических характеристик.
Согласно (3.4) статизм этой характеристики
больше нуля
![]() .
Рис.3.2
.
Рис.3.2
Это означает, что по внешней характеристике генератор относится к устройствам статического типа.
2.
Система стабилизации напряжения
«статическая» (рис.3.3).
Система
имеет управляющее устройство, состоящее
из источника регулируемого эталонного
напряжения
![]() ,
усилителя, измерительного устройства
в виде потенциометра R и цепи обратной
отрицательной связи.
,
усилителя, измерительного устройства
в виде потенциометра R и цепи обратной
отрицательной связи.
Когда
под действием какого либо фактора
изменяется выходное напряжение U,
изменяется и величина ошибки регулирования
![]() .
Пусть, например, произошло уменьшение
U, тогда при отрицательной ОС рассогласование
(ошибка) увеличится, и в системе
произойдут следующие изменения:
увеличится ток возбуждения
.
Пусть, например, произошло уменьшение
U, тогда при отрицательной ОС рассогласование
(ошибка) увеличится, и в системе
произойдут следующие изменения:
увеличится ток возбуждения
![]() ,
следовательно, увеличится э.д.с. якоря,
и увеличится напряжение на зажимах
генератора.
,
следовательно, увеличится э.д.с. якоря,
и увеличится напряжение на зажимах
генератора.
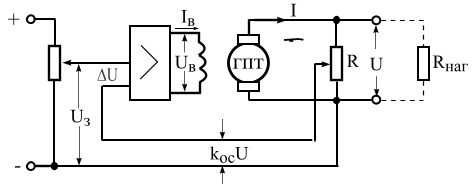
Рис. 3.3
Количественную оценку процесса регулирования сделаем с помощью математической модели системы, которая представляется следующей группой уравнений:
уравнение замыкания системы
![]() (3.5)
(3.5)
уравнение
усилителя с коэффициентом усиления
![]()
![]() (3.6)
(3.6)
уравнение
цепи обмотки возбуждения с сопротивлением
![]()
![]() (3.7)
(3.7)
уравнение э.д.с. генератора
![]() (3.8)
(3.8)
уравнение цепи якоря генератора
![]() (3.9)
(3.9)
Совместное решение уравнений (3.5 -3.9) дает все возможные статические характеристики автоматической системы, некоторые из которых рассмотрим ниже.
Статическая
ошибка регулирования
![]() .
Для получения
этой характеристики за независимую
переменную примем I,
за зависимую переменную примем
.
Для получения
этой характеристики за независимую
переменную примем I,
за зависимую переменную примем
![]() ,
после исключения остальных переменных
получим
,
после исключения остальных переменных
получим
![]() .
.
Ошибка регулирования в установившемся режиме системы определится уравнением
![]() (3.10)
(3.10)
где
![]() –
коэффициент усиления разомкнутой
системы. Это уравнение показывает, что
увеличением коэффициента усиления k
ошибку регулирования можно сделать
сколь угодно малой, но ее полное
исчезновение принципиально невозможно.
Этот вывод можно сделать и из принципа
действия системы: действительно,
напряжение на обмотке возбуждения
генератора не может существовать без
сигнала рассогласования на входе
усилителя, то есть в этой системе ошибка
регулирования является фактором,
обеспечивающим ее работоспособность.
–
коэффициент усиления разомкнутой
системы. Это уравнение показывает, что
увеличением коэффициента усиления k
ошибку регулирования можно сделать
сколь угодно малой, но ее полное
исчезновение принципиально невозможно.
Этот вывод можно сделать и из принципа
действия системы: действительно,
напряжение на обмотке возбуждения
генератора не может существовать без
сигнала рассогласования на входе
усилителя, то есть в этой системе ошибка
регулирования является фактором,
обеспечивающим ее работоспособность.
Статическая
внешняя характеристика системы
![]() .
Решение системы уравнений относительно
переменных U и I дает уравнение
.
Решение системы уравнений относительно
переменных U и I дает уравнение
![]() (3.11)
(3.11)
где
![]() –
напряжение системы в режиме холостого
хода,
–
напряжение системы в режиме холостого
хода,
![]() ,
,
![]() .
.
Статизм системы. Этот параметр системы определяется согласно (3.3) с использованием внешней характеристики (3.11)
![]() (3.12)
(3.12)
Статизм
внешней характеристики системы.
Подставляя в (3.4) значения напряжения
системы по (3.11) при холостом ходе
![]() и при номинальной нагрузке
и при номинальной нагрузке
![]() ,
получим
,
получим
![]() .
(3.13)
.
(3.13)
3.
Система стабилизации напряжения
«астатическая» (рис.3.4).
Принципиальным
отличием данной системы от предыдущей
является использование в цепи управления
исполнительного двигателя ИД, который
и создает астатизм. Когда в системе
рассогласования нет
![]() и напряжение на исполнительном двигателе
равно нулю, движок потенциометра П
неподвижен. Но при любом изменении
напряжения генератора появляется
рассогласование
,
которое заставляет исполнительный
двигатель ИД вращаться. При правильном
включении цепи обратной связи (это
должна быть отрицательная ОС) движок
потенциометра будет перемещаться в
сторону, уменьшающую рассогласование.
Вращение двигателя прекратится при
исчезновении напряжения на его якоре,
то есть при
и напряжение на исполнительном двигателе
равно нулю, движок потенциометра П
неподвижен. Но при любом изменении
напряжения генератора появляется
рассогласование
,
которое заставляет исполнительный
двигатель ИД вращаться. При правильном
включении цепи обратной связи (это
должна быть отрицательная ОС) движок
потенциометра будет перемещаться в
сторону, уменьшающую рассогласование.
Вращение двигателя прекратится при
исчезновении напряжения на его якоре,
то есть при
![]()

Рис.3.4