

1.3. Принципы автоматического управления
Несмотря на большое разнообразие технических процессов и объектов, в которых используется автоматическое управление, организация управления основывается на небольшом числе общих принципов это:
управление по отклонению,
управление по возмущению,
комбинированное управление,
управление с использованием алгоритмов адаптации.
Принцип управления, который закладывается в автоматическую систему, является определяющим фактором ее будущей архитектуры, ее технических и эксплуатационных свойств. Выбор принципа управления это, в первую очередь, выбор вида информации, на основе которой будет осуществляться управление системой.
Принцип управления по отклонению. В автоматических системах, построенных по этому принципу, управление основано на информации об отклонении управляемой величины от задания. Для передачи этой информации в устройство управления в системе создаются обратные связи. По величине отклонений управляющее устройство формирует управляющую реакцию.
Управление по отклонению обеспечивает универсальность управления, потому что управляющее воздействие не зависит от причин вызвавших рассогласование, будь они внешние или внутренние. Благодаря этому свойству данный принцип управления нашел очень широкое применение: он позволяет управлять неустойчивыми объектами, обеспечивать требуемые законы регулирования и точность.
Основным недостатком данного принципа является пониженное быстродействие системы, потому что система реагирует не на причину возмущения, а на результат его действия.
П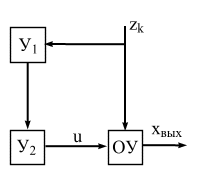 ринцип
управления по возмущению.
Управление
по возмущению осуществляется по величине
измеренного возмущения, действующего
на объект. Для реализации такого
управления не нужны обратные связи и
управляющие сигналы передаются по
разомкнутым цепям.
ринцип
управления по возмущению.
Управление
по возмущению осуществляется по величине
измеренного возмущения, действующего
на объект. Для реализации такого
управления не нужны обратные связи и
управляющие сигналы передаются по
разомкнутым цепям.
Н
Рис. 1.5![]() ,
и результат измерения передается в
устройство
,
и результат измерения передается в
устройство
![]() ,
в котором вырабатывается управляющее
воздействие
,
в котором вырабатывается управляющее
воздействие
Основным недостатком такого управления является избирательность системы на виды возмущения, но зато мгновенная реакция системы на возмущение существенно повышает ее быстродействие.
Принцип комбинированного управления. Современные автоматические системы высокой точности и быстродействия обычно строятся на основе первых двух принципов, сочетая в себе достоинства каждого из них. Поэтому в таких системах наряду с контурами обратных связей имеются цепи компенсации основных возмущающих воздействий (или цепи компенсации ошибок).
Принцип адаптации. Рассмотренные принципы управления долгое время были единственными. Однако успешное развитие кибернетики позволило применить в автоматических системах новый принцип управления, называемый принципом адаптации (приспособления). Особенностью систем, построенных на этом принципе, является наличие в них устройств анализа и самонастройки параметров, самонастройка происходит по текущей информации об условиях работы системы.