

5.4. Методы построения переходных процессов
Для определения числовых значений переходного процесса необходимо иметь его кривую, которую можно получить тремя способами: экспериментально, при помощи моделирования и расчетным путем. Ниже дается обзор некоторых расчетных методов построения переходных процессов. Это методы, основанные на решении дифференциальных уравнений, и частотный метод.
Методы решения дифференциального уравнения системы. Эти методы разделяют на точные и приближенные. К точным методам относятся классический и операторный. Различные численные и графические методы решения дифференциальных уравнений являются приближенными.
Классический метод. При решении дифференциального уравнения этим методом возникают трудности, связанные с определением корней характеристического уравнения и с решением системы алгебраических уравнений для определения постоянных интегрирования из начальных условий. Эти трудности существенно увеличиваются с возрастанием порядка дифференциального уравнения. Кроме того, решение дифференциального уравнения значительно усложняется, когда встречаются не нулевые начальные условия, или правая часть уравнения содержит производные. По этим причинам классический метод в автоматике находит ограниченное применение.
Операторный
метод.
Решение дифференциального уравнения
операторным методом сводится к отысканию
оригинала функции по ее известному
изображению путем обратного
преобразования Лапласа. Так, если мы
хотим найти переходную функцию
![]() ,
то необходимо знать ее изображение
,
то необходимо знать ее изображение
![]() и тогда
и тогда
![]()
В свою очередь изображение легко находится при помощи передаточной функции замкнутой системы по известной формуле
![]()
Для отыскания оригинала существует несколько способов. Можно использовать таблицы изображений, которыми удобно пользоваться при определении переходных функций типовых звеньев, так как в таблицах приведены сравнительно простые выражения для изображений. Однако изображение для автоматических систем обычно является сложной функцией аргумента р. В этом случае для нахождения оригинала лучше подходит теорема разложения.
Операторный метод решения дифференциального уравнения по сравнению с классическим обладает тем преимуществом, что в нем остается только одна трудная операция — определение корней алгебраического уравнения. Вторая трудная операция, связанная с определением постоянных интегрирования, отпадает, так как начальные условия учитываются автоматически при составлении передаточной функции системы. Поэтому операторный метод является более удобным, и его часто применяют для решения практических задач автоматического регулирования.
Частотный метод построения переходного процесса. Построение кривой переходного процесса по известным частотным характеристикам системы имеет большое практическое значение, так как не связано с громоздкими вычислениями. Кроме того, частотные характеристики можно снять экспериментально.
Этот метод построения переходного процесса основывается на количественной связи между временными и частотными характеристиками, отражаемой преобразованием (интегралом) Фурье
![]()
где Х(j) — изображение Фурье функции х (t) и определяется по формуле
![]() .
.
Согласно
этих формул переходная функция
(или
![]() для
единичного входного воздействия) может
быть определена так
для
единичного входного воздействия) может
быть определена так
![]() .
(5.42)
.
(5.42)
Но так как вести расчеты по этой формуле неудобно, из-за наличия комплексных функций под знаком интеграла, то, учитывая известные соотношения
![]()
![]()
переходный процесс при единичном внешнем воздействии получают по формуле
![]() ,
(5.43)
,
(5.43)
либо по формуле
![]() ,
(5.44)
,
(5.44)
где Р() и Q() — соответственно вещественная и мнимая частотные характеристики замкнутой системы.
Т
Рис. 5.5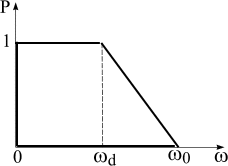
Суть метода состоит в следующем. График Р() разбивают на типовые трапеции и для каждой трапеции на основании заранее составленных таблиц h-функций, рассчитанных при помощи формулы (5.43), строят свой график переходной функции. Искомую переходную функцию находят путем алгебраического суммирования ординат отдельных составляющих.
Таблицы
h-функций
составлены для единичной трапеции,
которая характеризуется коэффициентом
наклона![]() (рис. 5.5).
Такая таблица позволяет для заданного
значения
(рис. 5.5).
Такая таблица позволяет для заданного
значения
![]() построить график переходной характеристики
h()
в функции относительного времени
построить график переходной характеристики
h()
в функции относительного времени
![]() ,
где
,
где
![]() текущее время переходного процесса.
Если высота трапеции не равна единице,
то график
h()
соответственно изменит свой масштаб
по оси ординат.
текущее время переходного процесса.
Если высота трапеции не равна единице,
то график
h()
соответственно изменит свой масштаб
по оси ординат.
Построение переходной функции h(t) производится в следующей последовательности:
Одним из известных методов определяют значения и строят график вещественной частотной характеристики Р() замкнутой системы (рис. 5.6,а}.
График Р() разбивают на типовые трапеции /, //, ///, для каждой из которых определяют ее параметры
 ,
,
 и 0i
(рис. 5.5,б).
и 0i
(рис. 5.5,б).Для каждой из этих трапеций при помощи таблицы h-функций строят график
 ,
пересчитывая относительное время в
натуральное по формуле
,
пересчитывая относительное время в
натуральное по формуле
 .
.Искомую переходную функцию находят путем алгебраического суммирования ординат переходных функций, соответствующих каждой трапеции.

Рис. 5.6
Как показывает практика использования этого метода, его точность вполне достаточна для инженерных расчетов и в значительной степени зависит от точности аппроксимации графика Р(ω) трапециями.