

4.3.5. Дифференцирующие звенья
Дифференцирующие звенья реагируют на скорость изменения входного воздействия, и поэтому в их дифференциальных уравнениях в правой части содержатся производные от входной переменной.
Идеальное дифференцирующее звено. Уравнение динамики звена, его операторное уравнение и передаточная функция имеют вид:
![]() (4.40)
(4.40)
![]() (4.41)
(4.41)
![]() .
(4.42)
.
(4.42)
Переходная характеристика звена представляет собой импульс с бесконечной амплитудой и бесконечно малой шириной (рис. 4.9,а) и записывается уравнением
![]() .
(4.43)
.
(4.43)
Действительно, идеальных дифференцирующих звеньев в природе нет, так как любое устройство обладает некоторой инерционностью и потерями, но некоторые технические устройства при определенных допущениях могут представляться таким звеном (см. пример 4.5).
Реальное дифференцирующее звено без статизма. Учет инерционности дает следующее уравнение динамики
![]() .
(4.44)
.
(4.44)
Передаточная функция и переходная характеристика звена запишутся следующим образом
![]() ,
(4.45)
,
(4.45)
![]() .
(4.46)
.
(4.46)
График переходной характеристики звена показан на рис. 4.9,б.
Реальное дифференцирующее звено со статизмом. Уравнение звена
![]() .
(4.47)
.
(4.47)
Передаточная функция и переходная характеристика звена запишутся так
![]() ,
(4.48)
,
(4.48)
![]() .
(4.49)
.
(4.49)
График переходной характеристики звена показан на рис. 4.9,в.

Рис. 4.9. Переходные характеристики дифференцирующих звеньев:
а) идеальное, б) реальное без статизма, в) реальное со статизмом
Пример
4.5. Близким к идеальному дифференцирующему
звену можно считать тахогенератор
постоянного тока (рис. 4.10,а), если входом
считать угол поворота ротора
![]() ,
а выходом его напряжение
,
а выходом его напряжение
![]() .
.
Действительно,
при постоянном потоке возбуждения
э.д.с. будет пропорциональна частоте
вращения
![]() и так как
,
то для режима холостого хода получим
и так как
,
то для режима холостого хода получим
![]() .
.
Пример
4.6. Реальным
звеном без статизма является С-R
контур
(рис. 4.10,б),
если принять
,
![]() .
Из уравнения баланса напряжений
.
Из уравнения баланса напряжений
![]()
после однократного дифференцирования и простых преобразований получим
![]() ,
,
где Т=RC - постоянная времени.
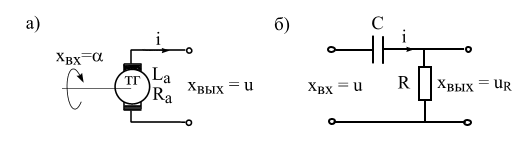
Рис. 4.10. Примеры дифференцирующих звеньев
4.3.6. Запаздывающее звено
Запаздывающим называется звено в котором выходное воздействие повторяет входное воздействие без искажений, но с некоторым постоянным запаздыванием во времени на величину . Эти условия определяют уравнение звена
![]() .
(4.50)
.
(4.50)
Применяя к последнему уравнению теорему запаздывания, можем записать
![]()
или,
обозначив
![]() ,
получим
,
получим
![]() .
.
Примерами запаздывающих звеньев являются транспортер, трубопровод гидравлической системы, линия электропередачи, двигатель, начинающий разгоняться через некоторое время после включения, когда его момент превысит значение пускового момента нагрузки.