7.5.3. Аналіз зрівноваженості рядного чотирициліндрового двигуна
Зрівноваженість відцентрових сил і моментів від них була оцінена раніше в підрозд. 7.5.1.
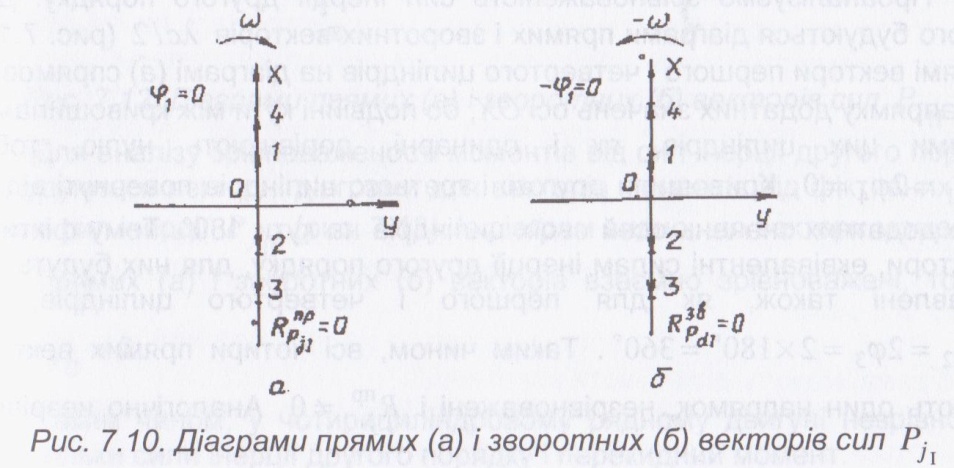
Для аналізу зрівноваженості сил інерції першого порядку будуються діаграми прямих та зворотних векторів для спрощення при φ1 =0 (рис. 7.10). Прямі вектори 1, 2, 3, 4, кожний з яких дорівнює с/2, обертається разом із своїми кривошипами (рис. 7.10, а). Зворотні вектори 7, 2, 3, 4, що також дорівнюють с/2 , обертаються з тією ж частотою в напрямку, протилежному обертанню кривошипа, а саме: при повороті кривошипа на кут <р вони повертаються на кут -φ (рис. 7.10, б). Аналіз векторних діаграм свідчить, що прямі та зворотні вектори для окремих циліндрів взаємно зрівноважуються, їх рівнодіючі
І
дорівнюють нулю при будь-якому положенні колінчастого вала. З цього витікає, що сили інерції першого порядку мас, які рухаються зворотно-поступально, у двигуні 4Р взаємно зрівноважені, тобто
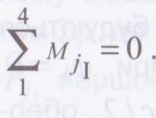
Для аналізу зрівноваженості моментів від цих сил інерції також будуються діаграми прямих і зворотних векторів (рис. 7.11), значення кожного вектора моменту на яких залежить від довжини плеча, на якому фіктивний вектор с/2 діє (рис. 7.4). Як видно з діаграм, сумарні вектори моментів RM j I від прямих (а) і зворотних (б) векторів сил інерції дорівнюють нулю, тобто вони взаємно зрівноважуються. Таким чином, моменти від сил інерції першого порядку взаємно зрівноважені, тобто
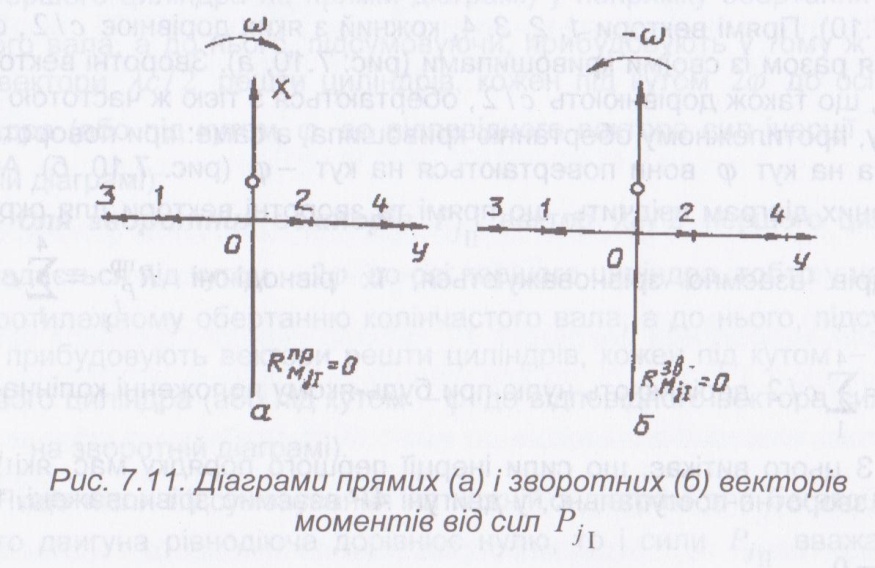
Проаналізуємо зрівноваженість сил інерції другого порядку. Для цього будуються діаграми прямих і зворотних векторів λс/2 (рис. 7.12). Прямі вектори першого і четвертого циліндрів на діаграмі (а) спрямовані у напрямку додатних значень осі ОХ, бо подвійні кути між кривошипами і осями цих циліндрів, як і одинарні, дорівнюють нулю, тобто 2φ1 - 2φ4 = 0. Кривошипи другого і третього циліндрів повернуті відносно додатних значень осей своїх циліндрів на кути 180°. Тому фіктивні вектори, еквівалентні силам інерції другого порядку, для них будуть направлені також, як для першого і четвертого циліндрів, бо 2φ2 =2φ3 =2×180° =360°. Таким чином, всі чотири прямих вектори мають один напрямок, незрівноважені і РпрjII ≠0. Аналогічно незрівноважена і має те ж значення і той же напрямок рівнодіюча зворотних векторів РзвjII. Із цього робимо висновок, що сили інерції другого порядку мас, що рухаються зворотно-поступально, у цьому двигуні незрівноважені. Залежність для їх рівнодіючої має вигляд:

![]()
а сама сила інерції змінюється під час роботи двигуна за гармонійним законом
відповідно виразу
![]()
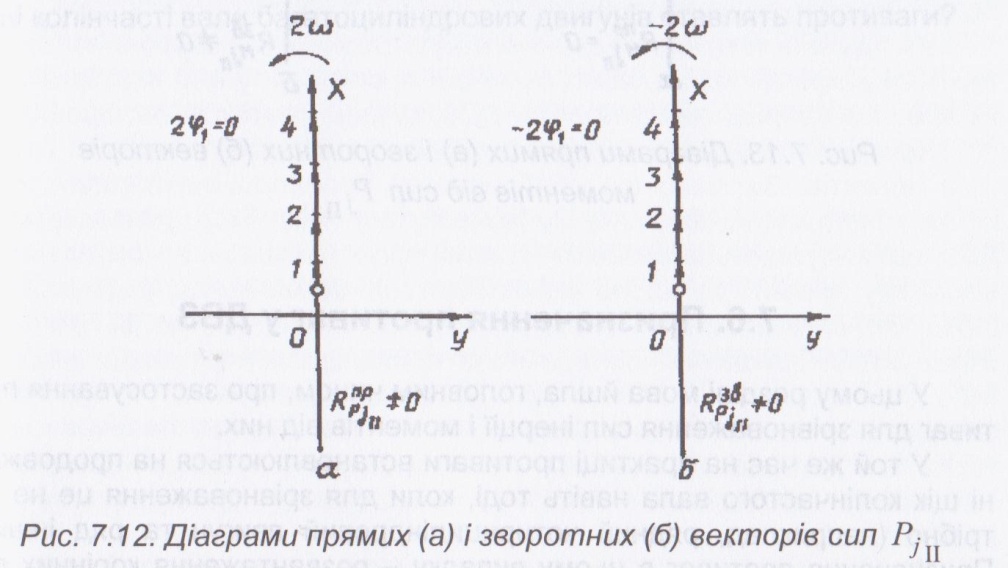
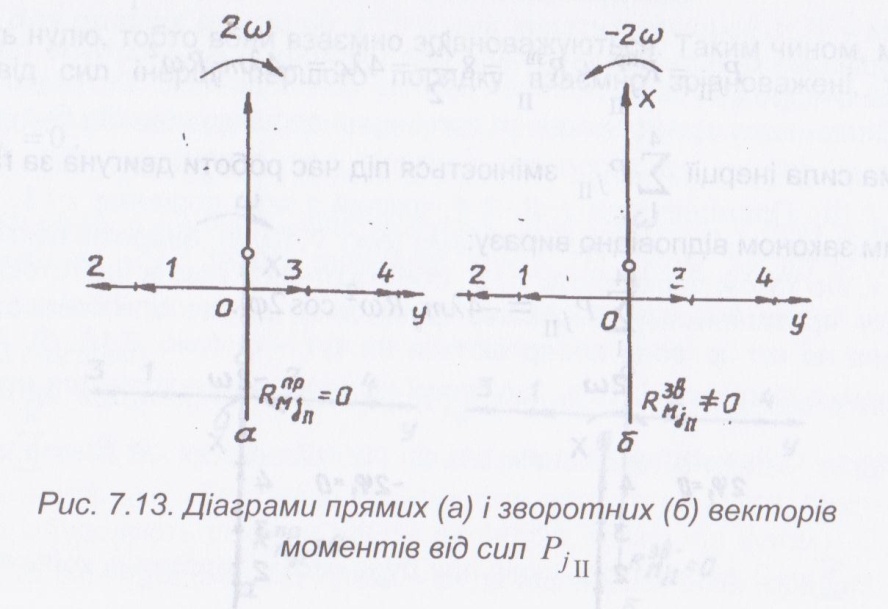
Для аналізу зрівноваженості моментів від сил інерції другого порядку будуються векторні діаграми для векторів моментів від фіктивних векторів сил інерції (рис. 7.13). Із діаграм видно, що вектори моментів для прямих (а) і зворотних (б) векторів взаємно зрівноважені, тобто
![]()
Таким чином, у чотирициліндровому рядному двигуні незрівноважені тільки сили інерції другого порядку і перекидний момент.
Порівняння аналітичного і графічного методів аналізу зрівноваженості для порівняно простих схем двигунів, як ця, мабуть, ще не дозволяє виявити істотну перевагу одного з них. За графічний метод свідчить те, що він показує де і як треба встановити противаги при необхідності зрівноваження сил інерції і моментів від них.