

1.Определение понятия электропривод.Структурная схема электропривода эп.
ЭЛЕКТРОПРИВОДОМ (ЭП) НАЗЫВАЕТСЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИ¬СТЕМА, СОСТОЯЩАЯ ИЗ ЭЛЕКТРОДВИГАТЕЛЬНОГО, ПРЕОБРАЗОВАТЕЛЬНОГО, ПЕРЕДАТОЧНОГО И УПРАВЛЯЮЩЕГО УСТРОЙСТВ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ РАБОЧИХ ОРГАНОВ МАШИН И УПРАВЛЕНИЯ ЭТИМ ДВИЖЕНИЕМ (ПО ГОСТ 16593-79).
ЭЛЕКТРОПРИВОДЫ ПОДРАЗДЕЛЯЮТСЯ НА ГРУППОВЫЕ, ИНДИВИДУ¬АЛЬНЫЕ И ВЗАИМОСВЯЗАННЫЕ.
В ГРУППОВОМ ПРИВОДЕ ОДИН ЭЛЕКТРОДВИГАТЕЛЬ ПРИВОДИТ В ДВИ¬ЖЕНИЕ С ПОМОЩЬЮ РАЗВЕТВЛЕННОЙ ПЕРЕДАЧИ ГРУППУ МЕХАНИЗМОВ ИЛИ РАБОЧИХ ОРГАНОВ ОДНОГО МЕХАНИЗМА. КИНЕМАТИЧЕСКАЯ СХЕМА ТАКОГО ПРИВОДА ГРОМОЗДКАЯ, А САМ ПРИВОД НЕЭКОНОМИЧЕН, ПОЭТО¬МУ НАХОДИТ ОГРАНИЧЕННОЕ ПРИМЕНЕНИЕ.
В ИНДИВИДУАЛЬНОМ ПРИВОДЕ ЭЛЕКТРОДВИГАТЕЛЬ ПРИВОДИТ В ДВИ¬ЖЕНИЕ ТОЛЬКО ОДИН РАБОЧИЙ ОРГАН. КИНЕМАТИЧЕСКАЯ СХЕМА МЕХА¬НИЗМА С ТАКИМ ПРИВОДОМ СУЩЕСТВЕННО УПРОЩАЕТСЯ, ПОВЫШАЕТСЯ ЭКОНОМИЧНОСТЬ И СНИЖАЕТСЯ МЕТАЛЛОЕМКОСТЬ МЕХАНИЗМА. ЭЛЕК¬ТРОДВИГАТЕЛЬ МОЖЕТ ВСТРАИВАТЬСЯ НЕПОСРЕДСТВЕННО В МЕХАНИЗМ.
ВЗАИМОСВЯЗАННЫЙ ПРИВОД ОБЕСПЕЧИВАЕТ РАБОТУ ОДНОГО МЕХА¬НИЗМА С ПОМОЩЬЮ НЕСКОЛЬКИХ ЭЛЕКТРОДВИГАТЕЛЕЙ.
СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОПРИВОДА ПРИВЕДЕНА НА РИС.1.
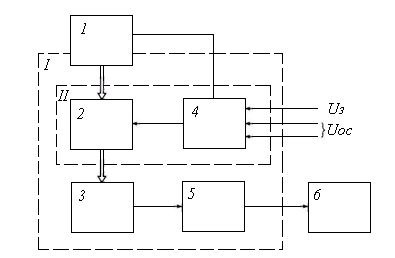
ОСНОВНОЙ ЭЛЕМЕНТ ЭЛЕКТРОПРИВОДА — ЭЛЕКТРОДВИГАТЕЛЬ (ЭД), КОТОРЫЙ ПРЕОБРАЗУЕТ ЭЛЕКТРИЧЕСКУЮ ЭНЕРГИЮ В МЕХАНИЧЕСКУЮ. ДЛЯ ПОЛУЧЕНИЯ ЭЛЕКТРОЭНЕРГИИ ТРЕБУЕМЫХ ПАРАМЕТРОВ МЕЖДУ ДВИГАТЕЛЕМ И ИСТОЧНИКОМ ЭНЕРГИИ ВКЛЮЧАЮТ СИЛОВОЙ ПРЕОБРА¬ЗОВАТЕЛЬ.
УПРАВЛЕНИЕ ПРЕОБРАЗОВАТЕЛЕМ ОСУЩЕСТВЛЯЕТСЯ ОТ БЛОКА УПРАВ¬ЛЕНИЯ, НА ВХОД КОТОРОГО ПОСТУПАЮТ ЗАДАЮЩИЙ СИГНАЛ UЗ И СИГ¬НАЛЫ UОС ОБРАТНОЙ СВЯЗИ (ОС), СОДЕРЖАЩИЕ ИНФОРМАЦИЮ О ХА¬РАКТЕРЕ ДВИЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ, РАБОТЕ ОТДЕЛЬНЫХ УЗЛОВ, АВАРИЙНЫХ РЕЖИМАХ. ПРЕОБРАЗОВАТЕЛЬ ВМЕСТЕ С БЛОКОМ УПРАВЛЕНИЯ ОБРАЗУЮТ СИСТЕМУ УПРАВЛЕНИЯ.
ЖИРНЫМИ СТРЕЛКАМИ НА РИС.1 ПОКАЗАНЫ СИЛОВЫЕ КАНАЛЫ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ЭНЕРГИИ, А ТОНКИМИ - КАНАЛЫ ПЕРЕДАЧИ СИГНАЛОВ УПРАВЛЕНИЯ.
2. Механические и электромеханические характеристики эд.
МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ РАБОЧЕЙ МАШИНЫ НАЗЫВАЕТСЯ ЗАВИСИМОСТЬ: М = F (Ω), ГДЕ М - МОМЕНТ СОПРОТИВЛЕНИЯ РАБОЧЕЙ МАШИНЫ, Н•М; Ω - УГЛОВАЯ СКОРОСТЬ, РАД/С; Ω=ΠN/30; Π - ЧАСТОТА ВРАЩЕНИЯ, ОБ/МИН.
БОЛЬШИНСТВО МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МАШИН ПОЗВОЛЯЕТ ОПИСАТЬ СЛЕДУЮЩАЯ ЭМПИРИЧЕСКАЯ ФОРМУЛА: М = М0 + (МС.НОМ - М0)(Ω/ΩНОМ)Х, ГДЕ М0 - НАЧАЛЬНЫЙ МОМЕНТ СОПРОТИВЛЕНИЯ ПРИ Ω = 0; Ω - ТЕКУЩЕЕ ЗНАЧЕНИЕ УГЛОВОЙ СКОРОСТИ, СООТВЕТСТВУЮЩЕЕ ТЕКУЩЕМУ ЗНАЧЕНИЮ МОМЕНТА М; МС.НОМ - СТАТИЧЕСКИЙ МОМЕНТ СОПРОТИВЛЕНИЯ ПРИ ΩНОМ.
ПРИ Х = 0 ПОЛУЧАЕТСЯ НЕ ЗАВИСЯЩАЯ ОТ СКОРОСТИ МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА, ДЛЯ КОТОРОЙ М = МС.НОМ (ПРЯМАЯ 1 НА РИС. 1). ТАКАЯ ХАРАКТЕРИСТИКА У ПОДЪЕМНЫХ КРАНОВ, ЛЕБЕДОК. К ЭТОЙ ГРУППЕ МОГУТ БЫТЬ ОТНЕСЕНЫ МЕХАНИЗМЫ, У КОТОРЫХ ОСНОВНОЕ СОПРОТИВЛЕНИЕ СОЗДАЮТ СИЛЫ ТРЕНИЯ (НАВОЗОУБОРОЧНЫЕ ТРАНСПОРТЕРЫ, КОРМОРАЗДАТЧИКИ, ШНЕКИ, КОНВЕЙЕРЫ, БАРАБАНЫ СУШИЛОК, ТРИЕРЫ). ПРИ Х=1 ПОЛУЧАЕТСЯ ЛИНЕЙНО ВОЗРАСТАЮЩАЯ ХАРАКТЕРИСТИКА (ЛИНИЯ 2 НА РИС.1). ЕЮ ОБЛАДАЮТ МНОГИЕ МАШИНЫ, У КОТОРЫХ ОСНОВНЫЕ СОПРОТИВЛЕНИЯ СОЗДАЮТСЯ СИЛАМИ ТРЕНИЯ СОВМЕСТНО С АЭРОДИНАМИЧЕСКИМИ (МОЛОТИЛКИ, ДРОБИЛКИ КОРМОВ, ЛЕСОПИЛЬНЫЕ РАМЫ, ЗЕРНООЧИСТИТЕЛЬНЫЕ МАШИНЫ). ИНОГДА ТАКАЯ ХАРАКТЕРИСТИКА НАЗЫВАЕТСЯ ГЕНЕРАТОРНОЙ, ТАК КАК ОНА ПРИСУЩА ГЕНЕРАТОРАМ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ ПРИ ПОСТОЯННОЙ НАГРУЗКЕ.
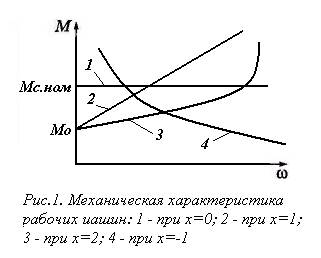
ЕСЛИ Х=2, ТО МОМЕНТ СОПРОТИВЛЕНИЯ ПРОПОРЦИОНАЛЕН КВАДРАТУ УГЛОВОЙ СКОРОСТИ (КРИВАЯ 3 НА РИС.1). ТАКАЯ ХАРАКТЕРИСТИКА НАЗЫВАЕТСЯ ВЕНТИЛЯТОРНОЙ. ТАК ИЗМЕНЯЕТСЯ МОМЕНТ СОПРОТИВЛЕНИЯ ВЕНТИЛЯТОРОВ, КОМПРЕССОРОВ, ЦЕНТРОБЕЖНЫХ НАСОСОВ, СЕПАРАТОРОВ, ПНЕВМАТИЧЕСКИХ ТРАНСПОРТЕРОВ И ДРУГИХ МЕХАНИЗМОВ, ПРИНЦИП РАБОТЫ КОТОРЫХ ОСНОВАН НА ЗАКОНАХ АЭРО- И ГИДРОДИНАМИКИ. ЕСЛИ Х=-1, ТО ПОЛУЧАЕТСЯ НЕЛИНЕЙНО СПАДАЮЩАЯ ХАРАКТЕРИСТИКА (КРИВАЯ 4 НА РИС.1), ДЛЯ КОТОРОЙ МОМЕНТ СОПРОТИВЛЕНИЯ ИЗМЕНЯЕТСЯ ОБРАТНО ПРОПОРЦИОНАЛЬНО СКОРОСТИ, А МОЩНОСТЬ ОСТАЕТСЯ ПОСТОЯННОЙ (ТАКОЙ ХАРАКТЕРИСТИКОЙ ОБЛАДАЮТ МЕТАЛЛОРЕЖУЩИЕ СТАНКИ, У КОТОРЫХ С УВЕЛИЧЕНИЕМ ПОДАЧИ СКОРОСТЬ ВРАЩЕНИЯ ДЕТАЛЕЙ УМЕНЬШАЕТСЯ)