

5. Схемы главных напряжений
Выделим в напряженном теле кубик со сколь угодно малыми гранями, перпендикулярными к главным направлениям. Грани кубика будут главными площадками. При уменьшении размеров-кубика он превратится в точку и напряжения на его гранях будут напряжениями в точке.
Графическое представление о наличии и знаке глгвных нормальных напряжений в точке называют схемой напряженного состояния. Понятие о схемах главных напряжений в теории обработки металлов давлением ввел С. И. Губкин.
По классификации С.И.Губкина можно указать 9 механических схем напряжений при ОМД (рис.): 29 схемы линейного напряженного состояния – схемы растяжения и сжатия (Л); 3 схемы плоского напряженного состояния (П) и 4 схемы объемного напряженного состояния (О)
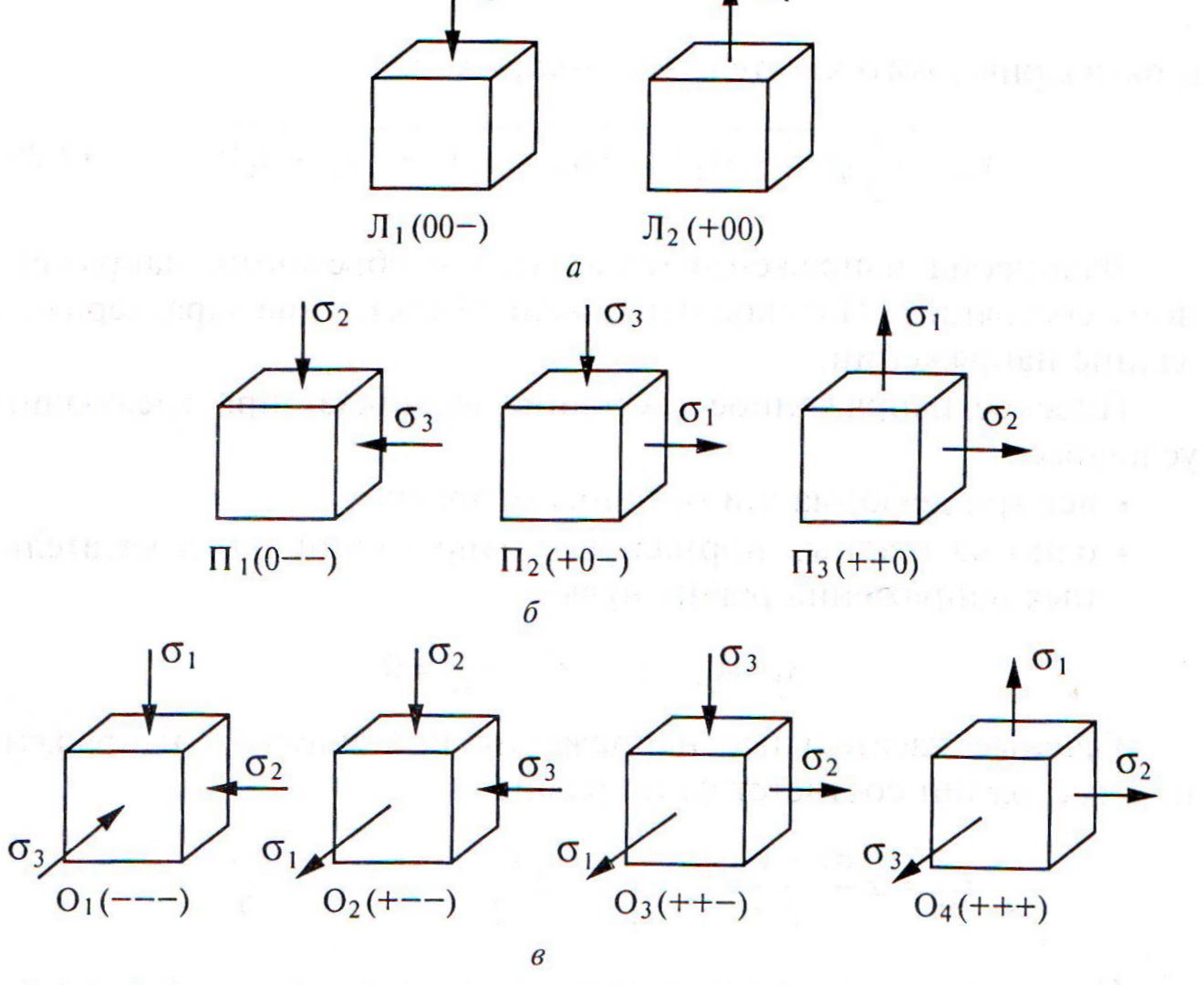
Рис.9. Механические схемы напряжений при ОМД: а – линейная, б – плоская, в – объемная.
Схемы, имеющие напряжения одного знака (минус — сжатие или плюс — растяжение), называют одноименными, а разных знаков — разноименными. Одноименные схемы: две линейные, две плоские и две объемные; разноименные схемы: одна плоская и две объемные.
 Схемы
главных напряжений можно
разложить на две — схему
шарового тензора и схему девиатора.
Схем шарового тензора может
быть только две — схема равномерного
сжатия и схема равномерного
растяжения (рис. 8
-10). Гидростатическое давление σср
как
среднее арифметическое главных напряжений
всегда меньше
максимального и больше минимального
главных напряжений:
σ1
>
σср
>
σ3
Схемы
главных напряжений можно
разложить на две — схему
шарового тензора и схему девиатора.
Схем шарового тензора может
быть только две — схема равномерного
сжатия и схема равномерного
растяжения (рис. 8
-10). Гидростатическое давление σср
как
среднее арифметическое главных напряжений
всегда меньше
максимального и больше минимального
главных напряжений:
σ1
>
σср
>
σ3
Поэтому составляющая девиатора в направлении оси / будет положительная, а в направлении оси 3 отрицательная:
![]()
Составляющая
девиатора по направлению оси 2
может
быть больше и меньше нуля; в частном
случае она может быть равна нулю,
когда![]() Следовательно, всего будет три схемы
девиатора напряжения (рис. 10):
две объемные и одна плоская.
Следовательно, всего будет три схемы
девиатора напряжения (рис. 10):
две объемные и одна плоская.
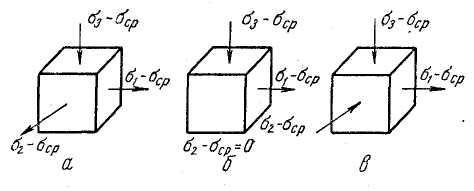
Рис.11. Схемы девиатора напряжений
Если максимальная по абсолютной величине составляющая девиатора сжимающая, то схему девиатора называют девиаторной схемой сжатия (рис. 9, а), а если растягивающая — девиа-торной схемой растяжения (рис. 9, в).
Если одна из составляющих девиатора равна нулю, схему называют девиаторной схемой сдвига (рис. 9,6). В этом случае составляющие по двум остальным осям равны по абсолютной величине, но противоположны по знаку.
6. Дифференциальное уравнение равновесия.
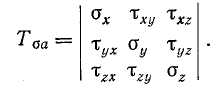
В теле, находящемся в напряженном состоянии, величина напряжений изменяется от точки к точке и является непрерывной функцией координат. Определим условия равновесия бесконечно малого параллелепипеда с ребрами dx, dy и dz, параллельными осям координат х, у, z (рис. 10), не являющимся главными. Напряженное состояние точки а с координатами х, у, z определяется напряжениями, действующими на гранях abcd, adb'c' и abd'c', и соответствующим им тензором напряжений:
Напряженное
состояние в точке а'
определяется
напряжениями,
действующими на площадках![]() .
Эти напряжения
отличаются от соответствующих напряжений
в точке
а
бесконечно малыми значениями. Интенсивность
изменения напряжений при переходе от
точки а
к
точке а'
по
какой-либо оси выражается
частной производной этого напряжения
по соответствующей
координате. Так, интенсивность
изменения
.
Эти напряжения
отличаются от соответствующих напряжений
в точке
а
бесконечно малыми значениями. Интенсивность
изменения напряжений при переходе от
точки а
к
точке а'
по
какой-либо оси выражается
частной производной этого напряжения
по соответствующей
координате. Так, интенсивность
изменения
![]() по
х
по
х
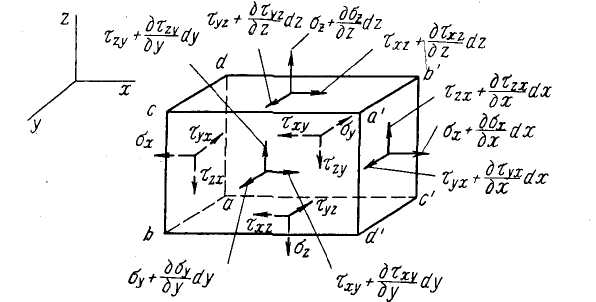
Рис. 11. Напряжения на гранях бесконечно малого параллелепипеда
После раскрытия скобок и сокращения на dxdydz получаем одно из уравнений равновесия. Проектируя силы на оси х, у и z, получаем дифференциальные уравнения равновесия, которые содержат 9 неизвестных функций.
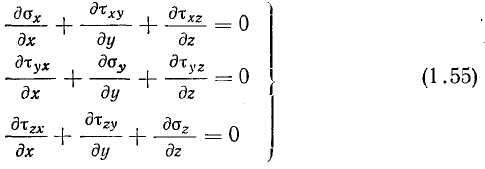
Благодаря свойству взаимности касательных напряжений, число неизвестных функций сокращается до 6 и все же задача определения напряжений является статически неопределимой. Для решения задачи вводят дополнительные уравнения, которые получают из рассмотрения физических свойств деформируемых материалов, в которых установлены зависимости между напряжениями и деформациями.
Дифференциальные уравнения равновесия являются основой при определении компонентов тензора напряжений в рассматриваемой точке пластически деформируемого тела.