

Мал. 2.8. Маніпулятор з пантографом в циліндровій системі координат
Він володіє тією властивістю, що його ланки мають кутові рухи, а результуюче переміщення кінця маніпулятора відбувається в прямокутній системі координат. Зокрема, не дивлячись на кутові рухи ланок, тут легко і з малою енергетичною витратою здійснюються прямолінійні вертикальні і горизонтальні переміщення кінця маніпулятора Р. Якщо такий механізм встановити на підставі (мал. 2.8), що повертається, то маніпулятор працюватиме в циліндровій системі координат.
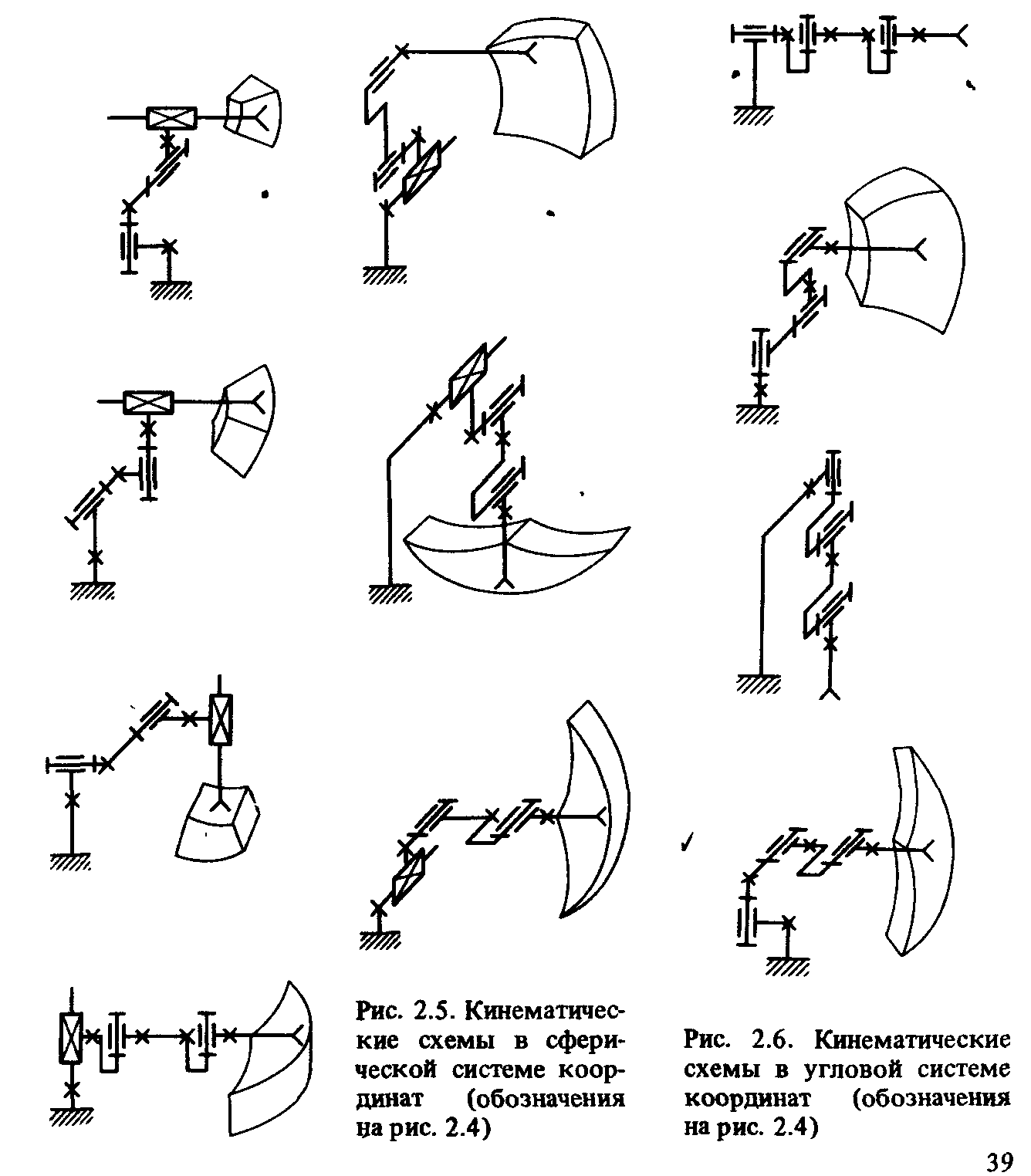
Приклад компоновки маніпулятора в сферичній системі координат переносного руху (а, s, 41) і з трьома обертальними ступенями рухливості для орієнтації захватного пристрою (0,7,0) показаний на мал. 2.9.
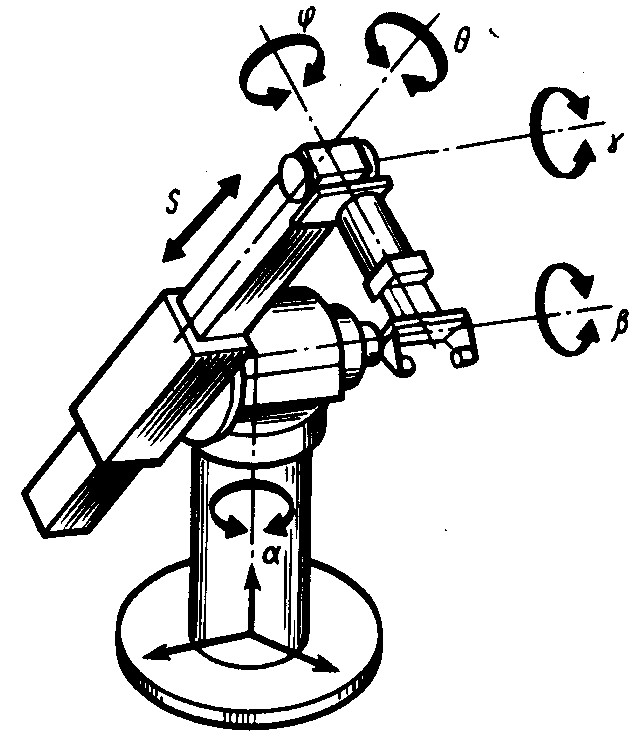

Мал. 2.9. Приклад схеми маніпулятора
Мал. 2.10. Схема маніпулятора в кутовій системі координат

Мал. 2.11. Схеми маніпуляторів в прямокутній (а) і циліндровій (б) системах координат
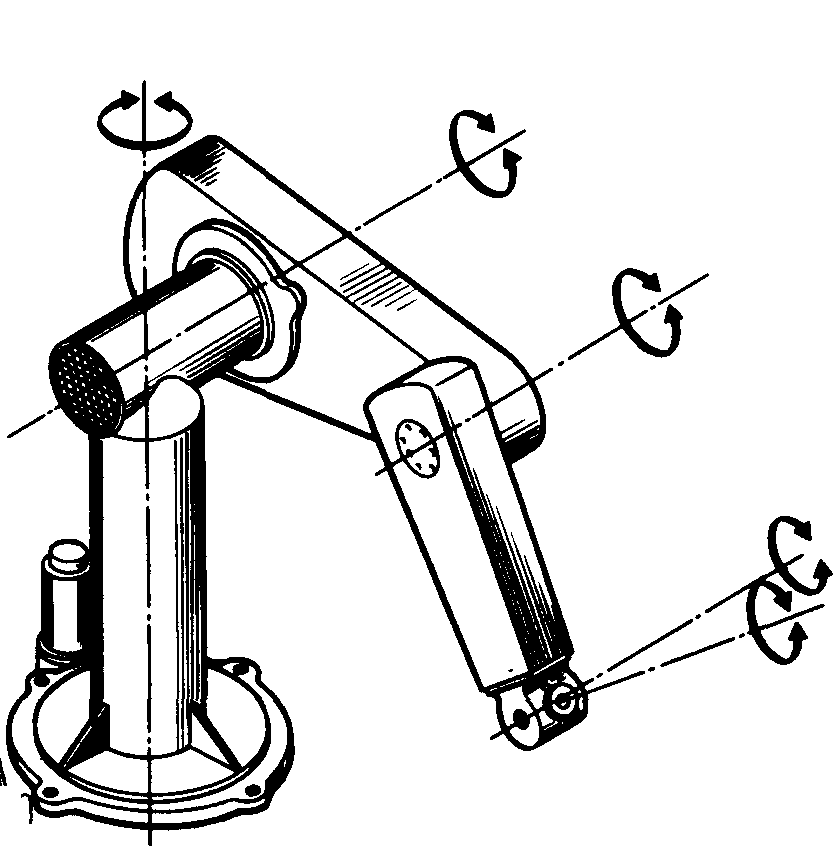
Мал. 2.12. Схема маніпулятора робота типу ПУМА
Компоновка маніпулятора в кутовій системі координат (q1 ~ q6) зображена на мал. 2.10. Спрощені ілюстрації компоновок маніпуляторів в прямокутній (а) і циліндровій (б) системах координат представлені на мал. 2.11.
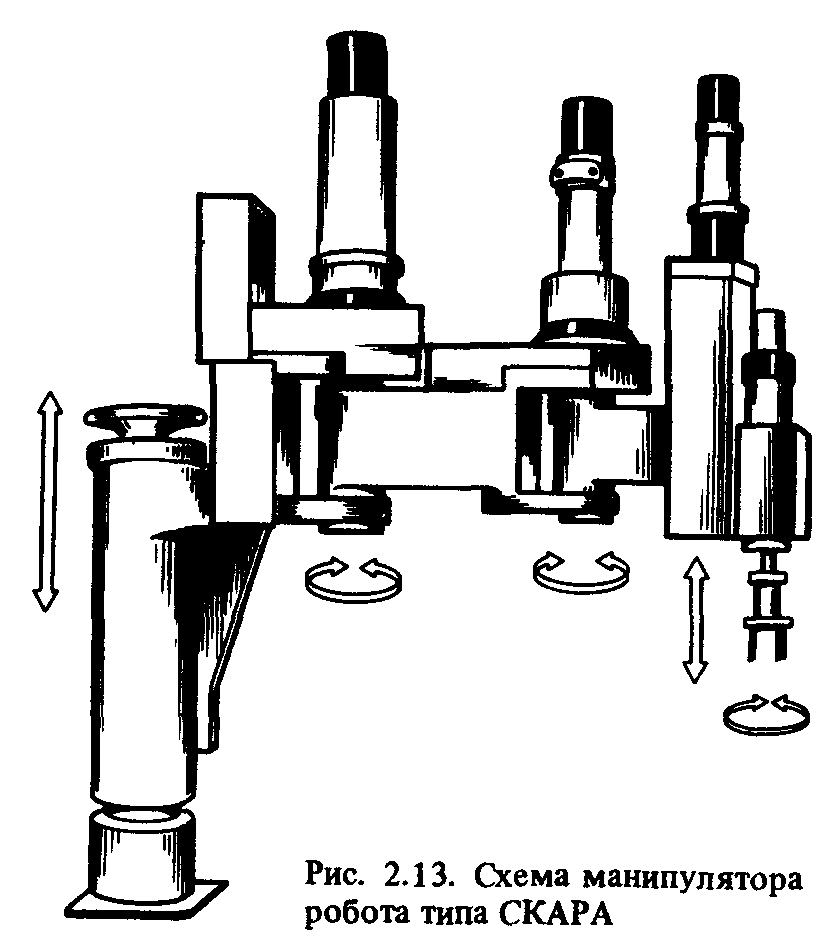
Серед кінематичних схем маніпуляторів в кутовій системі координат останніми роками особливо широке поширення набули два типи схем: ПУМА і СКАРА (СКІЛАМ). В схемі типу ПУМА відбувається рух всіх ланок руки у вертикальній площині щодо горизонтальних осей і загальний поворот всієї руки в цілому навкруги вертикальної осі (мал. 2.12). В схемі ж типа СКАРА всі ланки руки розташовані в горизонтальній площині і обертаються навкруги вертикальних осей, а остання ланка з обхватом (або інструментом) має вертикальне поступальне переміщення (мал. 2.13). При необхідності всю руку в цілому можна підняти або опустити в стійці підстави маніпулятора.
Найменування ПУМА розшифровується таким чином: програмований універсальний маніпулятор для збірки, а СКАРА - податлива селективна рука складального робота (в перекладі розшифровки на російську мову). Привласнена їй в одній з фірм фабрична марка СКІЛАМ означає "спритна рука".
Умови технологічного вживання робота диктують необхідність тієї або іншої компоновки залежно від необхідної універсальності рухів з урахуванням переналагодження на виконання різних операцій. Тут пред'являються вимоги до розмірів і конфігурації робочої зони, до швидкостей, прискоренням і до точності виконання рухів і позицій, до можливості здійснення необхідних кутових положень захватного пристрою (або інструменту) в різних точках робочої зони. Визначається число, вигляд і взаємне розташування ступенів рухливості, а також можливі технологічні зусилля на робочому органі робота.
Не останнє місце при цьому займають економічні показники, як процесу виготовлення робота, так і його експлуатації. З економічної точки зору доцільно, наприклад, використовування уніфікованих вузлів в маніпуляційному механізмі робота. З цією метою вдаються до модульної побудови конструкції, приводів і системи управління, щоб з готових уніфікованих модулів можна було компонувати різні види роботів відповідно до вимог їх технологічного вживання і вибору кожного разу найпростіших і економічних рішень.
Окрім охарактеризованих вище схем і компоновок може знадобитися ще переміщення робота в цілому, разом з його підставою, по балці в підвісному варіанті або ж по підлозі цеху. В цьому випадку окрім механізму поступальної ходи підстава робота забезпечується гнучкою конструкцією підведення до нього необхідних комунікацій, зокрема енергоживлення (мал. 2.14, а, би, в).