

Лекція №2 кінематика багатоланкових маніпуляторів Загальна схема маніпулятора.
Виконавчим пристроєм робота є маніпулятор, забезпечений на вільному кінці захватним пристроєм або яким-небудь інструментом. Ланки маніпулятора з'єднуються один з одним за допомогою кінематичних пар п'ятого порядку (по класифікації в теорії механізмів і машин), обертальних і поступальних. Кожна кінематична пара приводиться в дію від керованого приводу. Всі ці приводи з'єднані єдиною системою управління робота для здійснення координованого руху всіх ланок маніпулятора відповідно до програми виконання технологічного процесу.
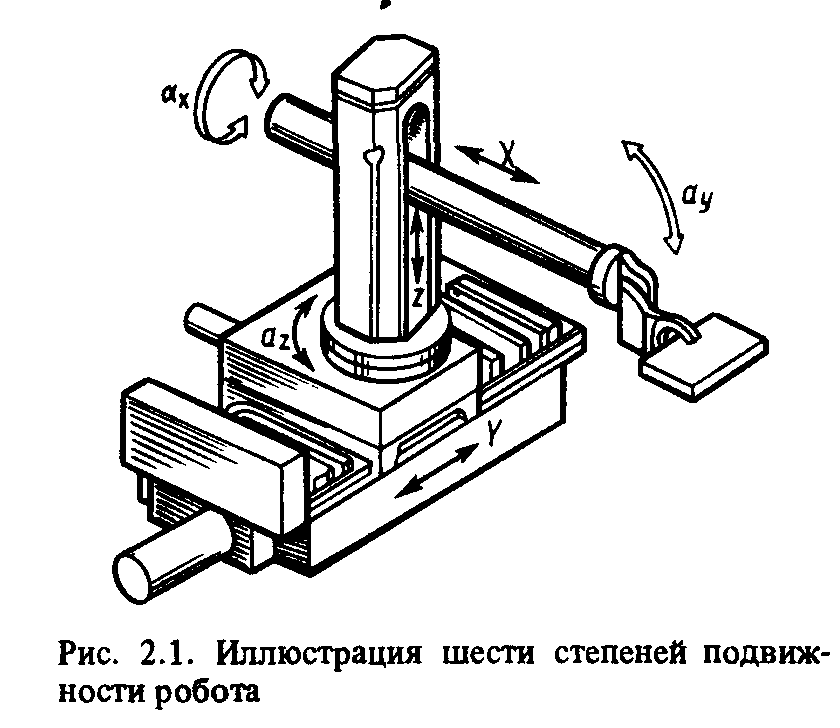
Для повного здійснення просторового руху необхідно мати в маніпуляторі шість ступенів рухливості (мал. 2.1), з них три потрібні для приведення кінця маніпулятора в необхідну точку простору (вони іменуються транспортними або переносними ступенями рухливості), ще три - для отримання необхідної кутової орієнтації захватного пристрою або інструменту (вони називаються орієнтуючими ступенями рухливості). При цьому реалізується універсальний маніпулятор, здатний проводити будь-які переміщення усередині своєї робочої зони.


У багатьох випадках такої універсальності за умов вживання не вимагається, і тоді створюються маніпулятори з трьома, чотирма або п'ятьма ступенями рухливості. В деяких випадках необхідно мати надмірні ступені рухливості понад шість. При цьому одне і те ж положення і орієнтація на кінці маніпулятора можуть бути досягнуті при різній загальній конфігурації ланок (див., наприклад, мал. 2.2 у разі руху в одній площині). Це необхідне для обходу яких-небудь перешкод, що є в робочій зоні маніпулятора.
Кінематичні компоновки маніпуляторів.
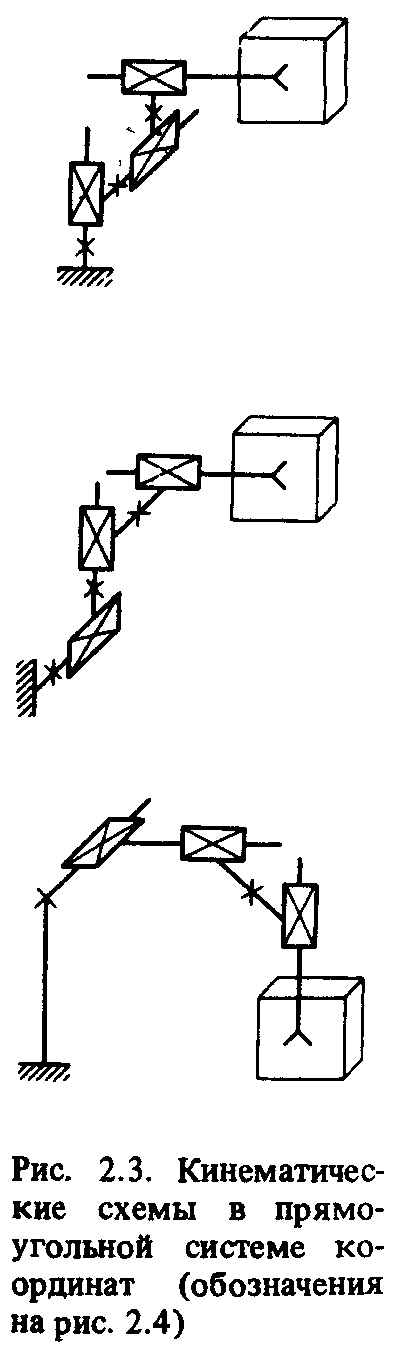
Існує велика різноманітність кінематичних схем маніпуляторів промислових роботів. Вони пов'язані з різними системами координат. На мал. 2.3-2.6 показані компоновки трьох перших ступенів рухливості маніпулятора (переносних), що визначають три просторові координати точок робочої зони. Зображені в зменшеному масштабі і зразкові контури робочої зони в різних системах координат. Саме цими переносними ступенями рухливості в різних системах координат визначаються форма і розміри робочої зони робота. Що додаються потім орієнтуючі ступені рухливості мало на це впливають.
Прямокутна система координат реалізується трьома поступальними кінематичними парами (мал. 2.3), циліндрова система - двома поступальними і однієї обертальної (мал. 2.4), сферична - двома обертальними і однієї поступальної (мал. 2.5), кутова система (іноді її називають ангулярной) - трьома обертальними (мал. 2.6). Вибір тієї або іншої системи визначається сукупністю багатьох конструктивних і експлуатаційних чинників. Це пов'язано і з компоновкою двигунів різного типу. На перших порах частіше уживалися циліндрова і сферична системи. Останніми роками все більш широке вживання мають кутові системи координат.
Набув поширення в кінематичній компоновці маніпулятора промислового робота механізм, званий пантографом (мал. 2.7)
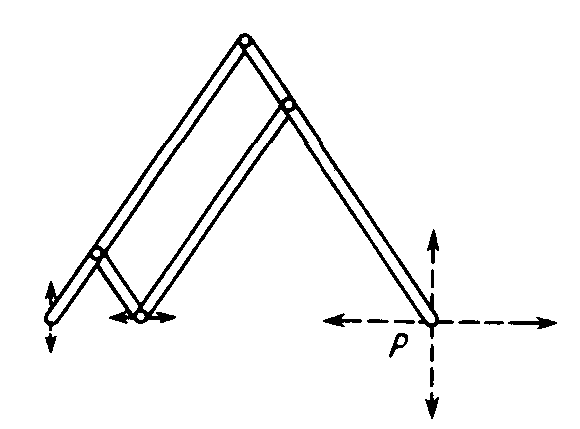

Мал. 2.7. Схема пантографа