

Лекція №1
промислові роботи
Практика показала, що далеко не всі ручні технологічні операції можна автоматизувати традиційними технічними засобами автоматики, тому і виникла необхідність створення промислових роботів. Проте не слід представляти собі справу так, що робот створюється у вигляді копії людини-робітника.
Промисловий робот – це виробнича машина, яка не має нічого загального з людською фігурою. Форми і конструкції роботів відрізняються великою різноманітністю і пристосовані до виконання тих або інших технологічних операцій.
Основними
компонентами робота (мал. 1.1) є маніпуляційний
механізм і автоматична система управління,
що містить  як
правило, МІКРОЕОМ або комплекс
мікропроцесорів, а у ряді випадків і
сенсорні пристрої (засоби очувствления).
Маніпулятор робота складається з ланок,
сполучених рухомими кінематичними
парами (обертальними і поступальними)
. Останні рухаються за певною програмою
за допомогою керованих приводів.
як
правило, МІКРОЕОМ або комплекс
мікропроцесорів, а у ряді випадків і
сенсорні пристрої (засоби очувствления).
Маніпулятор робота складається з ланок,
сполучених рухомими кінематичними
парами (обертальними і поступальними)
. Останні рухаються за певною програмою
за допомогою керованих приводів.
Визначення поняття робот. Існують різні визначення поняття "робот". Приведемо тут два визначення.
У узагальненому значенні, маючи у вигляді не тільки промислові маніпуляційні роботи, а і інші їх класи, можна поняття робота визначити таким чином: РОБОТ — це технічний комплекс, призначений для виконання різних рухів і деяких інтелектуальних функцій людини і який володіє необхідними для цього виконавчими пристроями, управляючими і інформаційними системами, а також засобами рішення обчислювально-логічних задач.
`Інше визначення дається спеціально промисловому роботу (ГОСТ 25686-85).
Промисловий робот — це автоматична машина, стаціонарна або пересувна, складається з виконавчого пристрою у вигляді маніпулятора, що має декілька ступенів рухливості, і перепрограмованого пристрою програмного управління, для виконання у виробничому процесі рухомих і управляючих функцій.
До цього визначення ГОСТ дає примітку: перепрограммованість – властивість промислового робота замінювати управляючу програму автоматично або за допомогою людини-оператора. До того, що перепрограмував відноситься зміна послідовності і (або) значення переміщень по ступенях рухливості і управляючих функцій за допомогою засобів управління на пульті пристрою управління.
Термін "маніпулятор" той же ГОСТ визначає таким чином.
Маніпулятор — керований пристрій або машина для виконання рухомих функцій, аналогічних функціям руки людини при переміщенні об'єктів в просторі, оснащене робочим органом.
Робочий орган — складова частина виконавчого пристрою промислового робота для безпосереднього виконання технологічних операцій і (або) допоміжних переходів. Прикладами робочого органу служать зварювальні кліщі, пістолет забарвлення, складальний інструмент, захватний пристрій.
Завдяки наявності декількох ступенів рухливості і гнучкої системи управління, яка легко переналагоджується на виконання різних програм руху маніпулятора, робот є багатофункціональною машиною.
Це відповідає вимогам гнучкого пере настроювання виробництва на різні технологічні процеси. В цих цілях доцільно поєднувати роботи з таким технологічним устаткуванням, яке забезпечене числовим програмним управлінням (ЧПУ), також легко переналагоджуваним.
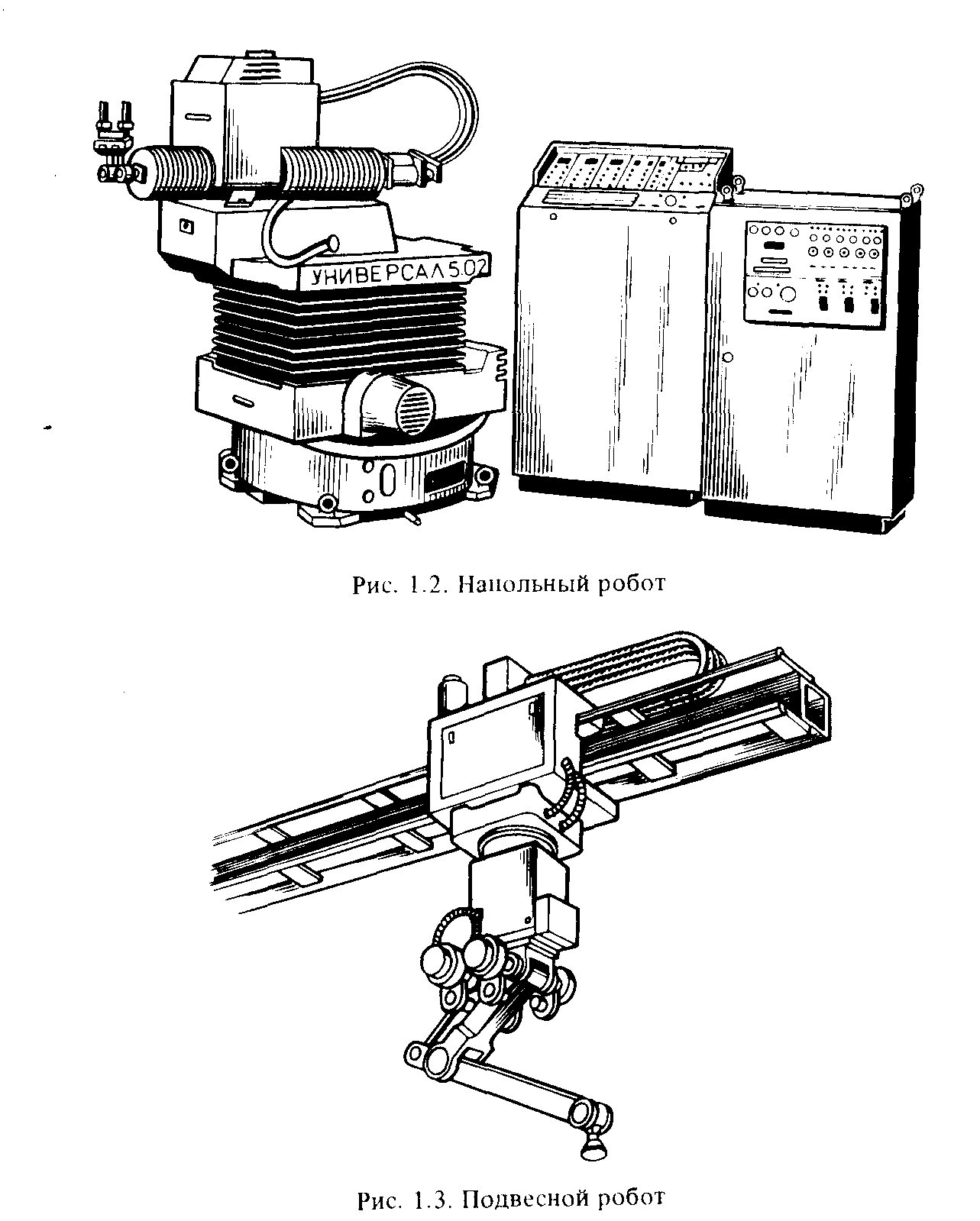
Роботи проводяться в напільному (мал. 1.2), підвісному (мал. 1.3) і портальному (мал. 1.4) виконаннях. Невеликі роботи можуть бути настільними або ж встановлюваними на об'єкті устаткування безпосередньо, наприклад, на станині токарного верстата (мал. 1.5). Для обслуговування двох або декількох верстатів робот може автоматично переміщатися за програмою, що задається.
Найбільше поширення роботи набули в машинобудівних і приладобудівних галузях. Але існує також тенденція комплексної автоматизації із застосуванням роботів в інших галузях промисловості (легкої, харчової, хімічної, будівельної, металургійної, угле-, нафто-, газо добувної і ін.) .

Класи роботів широкого призначення. Промислові роботи, про яких мовилося вище, відносяться до класу маніпуляційних роботів. Іншими класами роботів є мобільні (рухомі), і інформаційні роботи.
Мобільні робототехнічні системи відрізняються наявністю рухомого шасі з автоматично керованими приводами, вони можуть бути колісними (мал. 1.6), крокуючими (локомоционними) (мал. 1.7), колісно-крокуючими і гусеничними. Існують також плаваючі і літаючі мобільні робототехнічні системи. Часто мобільні машини несуть на собі і маніпуляційні роботи і можуть застосовуватися в нежилих апаратах під водою і в польових умовах, і в космічних польотах, а також на промислових підприємствах, в будівництві і на транспорті.
На заводах багато ручної праці потрібне при транспортуванні деталей, матеріалів і інструменту в заводському цеху між верстатами і складами. Тут об'єктом робототехніки є створення автоматичних візків (робокаров), рухомих в цеху за заданою програмою при управлінні від ЕОМ. Програма може легко переналагоджуватися. Це ж відноситься і до автоматичних підвісних транспортних роботів. Треба згадати і про автоматизацію всіх видів складських робіт за допомогою робототехнічних систем, коли робот автоматично обслуговує за програмою від ЕОМ різні осередки складу і що прибувають до нього робокары.

ІНФОРМАЦІЙНО-УПРАВЛЯЮЧІ робототехнічні системи можуть не мати механічно рухомих виконавчих пристроїв. Вони на підставі інформації, що поступає від яких-небудь зовнішніх джерел; проводять по певних алгоритмах і програмах (у тому числі що адаптується до обстановки і до поставленої задачі) обробку інформації, видачу результатів на дисплеї або інші зовнішні пристрої, а також автоматично виробляють необхідні керівники сигнали. На основі цих результатів інформаційні робототехнічні системи можуть визначати властивості невідомих об'єктів в будь-якому середовищі, зокрема автоматично проводити дослідження в космічному просторі.
Інформаційні роботи можуть поміщатися в нежилих підводних апаратах і автоматично управляти їх рухом залежно від ситуації і результатів вимірювань в місці їх дії.
До інформаційних роботів відносяться також і автоматичні контрольно-вимірювальні системи на виробництві. Насправді, багато ручної праці там затрачується на контрольно-вимірювальні операції. Тут призначенням робототехники є автоматизація самого процесу контролю, подачі деталей на контроль, проведення вимірювань і потім автоматичне сортування деталей різного ступеня придатності (або просто на годні і браковані), а також передача до верстата інформації про необхідність під наладки і ін. Ця задача теж повинна бути вирішена для завершення комплексної автоматизації виробництва і ліквідації одноманітної ручної праці. В таких інформаційних роботах можуть бути присутні і деякі маніпуляційні пристрої.
Класифікація промислових роботів проводиться по різних ознаках, а саме: по типу системи управління, по технологічному призначенню, по типу кінематичної схеми, по вантажопідйомності, по виду приводів, по числу ступенів рухливості і ін.

По типу систем управління сучасні і перспективні промислові роботи діляться на три роди, іменовані також "поколіннями": програмні, адаптивні і интеллектные (з елементами штучного інтелекту). Всі вони володіють властивістю швидкого перепрограмувало на різні операції, причому в першому поколінні (програмні роботи) той, що перепрограмував, проводиться людиною (мал. 1.8), після чого робот діє автоматично, багато разів повторюючи жорстко задану програму.
Найважливішою відмітною особливістю промислових роботів першого покоління є те, що вони, як правило, не мають датчиків зворотного зв'язку і не можуть реагувати на зміни зовнішнього середовища. Передбачається, що середовище, що оточує робота, строго організовано, детерміновано і незмінно. Ця особливість дещо обмежує області вживання промислових роботів. Програмування їх рухів здійснюється в основному методом навчання, а програма передбачає запис всіх рухів маніпулятора.
Н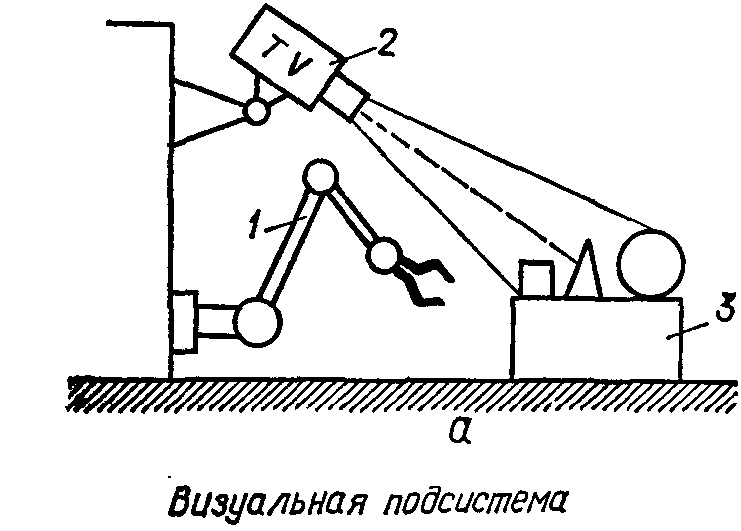 айбільш
ефективне вживання промислових роботів
для автоматизації транспортних,
допоміжних і деяких технологічних
операцій в умовах дрібносерійного і
серійного виробництва.
айбільш
ефективне вживання промислових роботів
для автоматизації транспортних,
допоміжних і деяких технологічних
операцій в умовах дрібносерійного і
серійного виробництва.
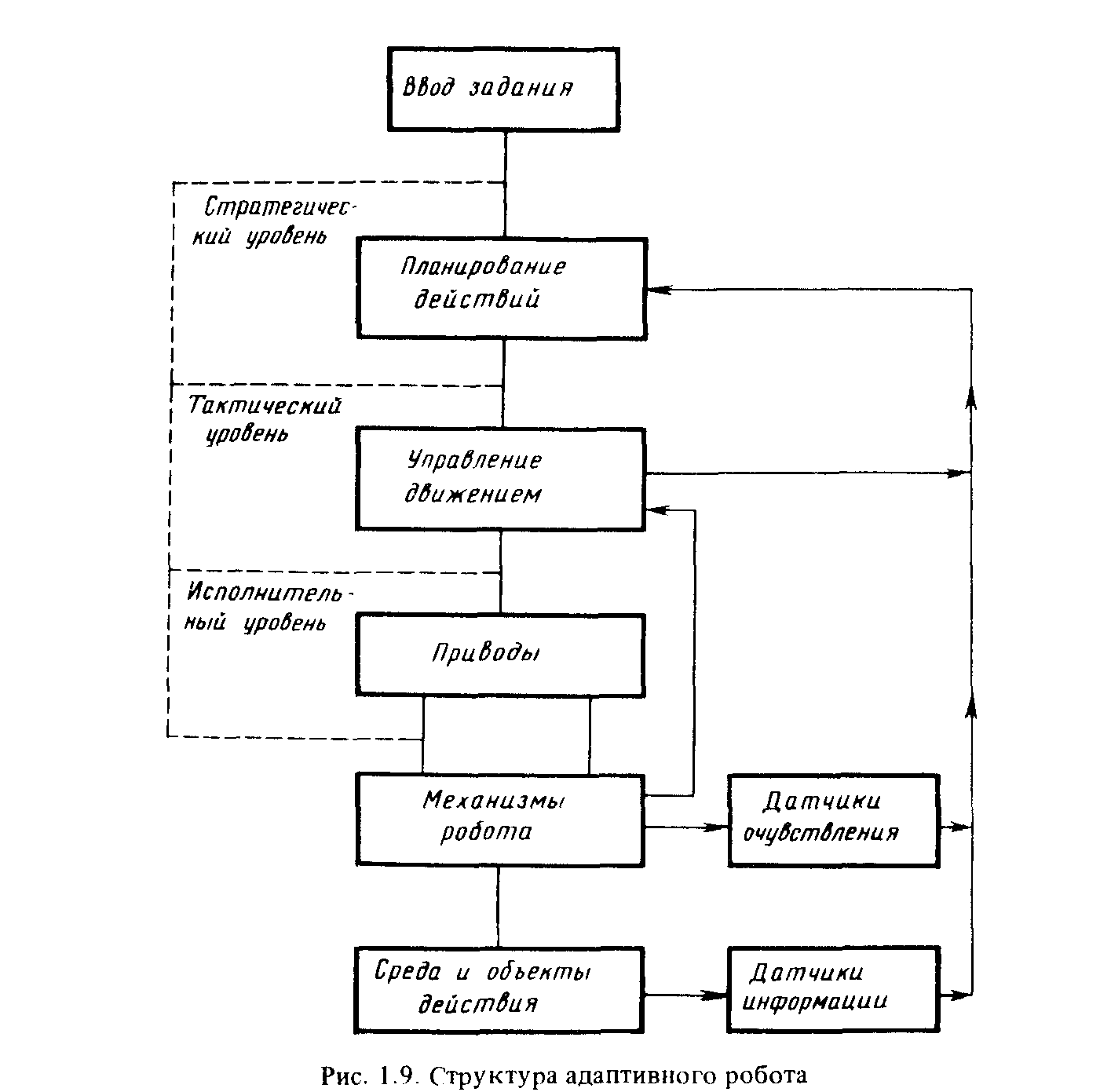
У другому поколінні (адаптивні роботи) основи програми дій робота закладаються людиною, але сам робот має властивість в певних рамках автоматично перепрограмуватися (адаптуватися) в ході технологічного процесу залежно від обстановки, яка неточно визначена наперед (мал. 1.9).
Вони оснащені датчиками зворотного зв'язку — сенсорними пристроями, тобто очувствлены. Ця особливість і є головною, відрізняючою адаптивні роботи від роботів I покоління. Можливість коректувати програму залежно від зміни параметрів зовнішнього середовища дозволяє істотно розширити область вживання роботів цього покоління в порівнянні з промисловими роботами. Маніпулятори робочих органів адаптивних роботів не мають принципових відмінностей від роботів I покоління.
Системи управління адаптивними роботами, звичайно, складніше за системи управління промисловими роботами. Програмування передбачає запис основної програми і наявність в системі управління відповідних підпрограм, що включаються залежно від ситуації, що склалася, в навколишньому середовищі.
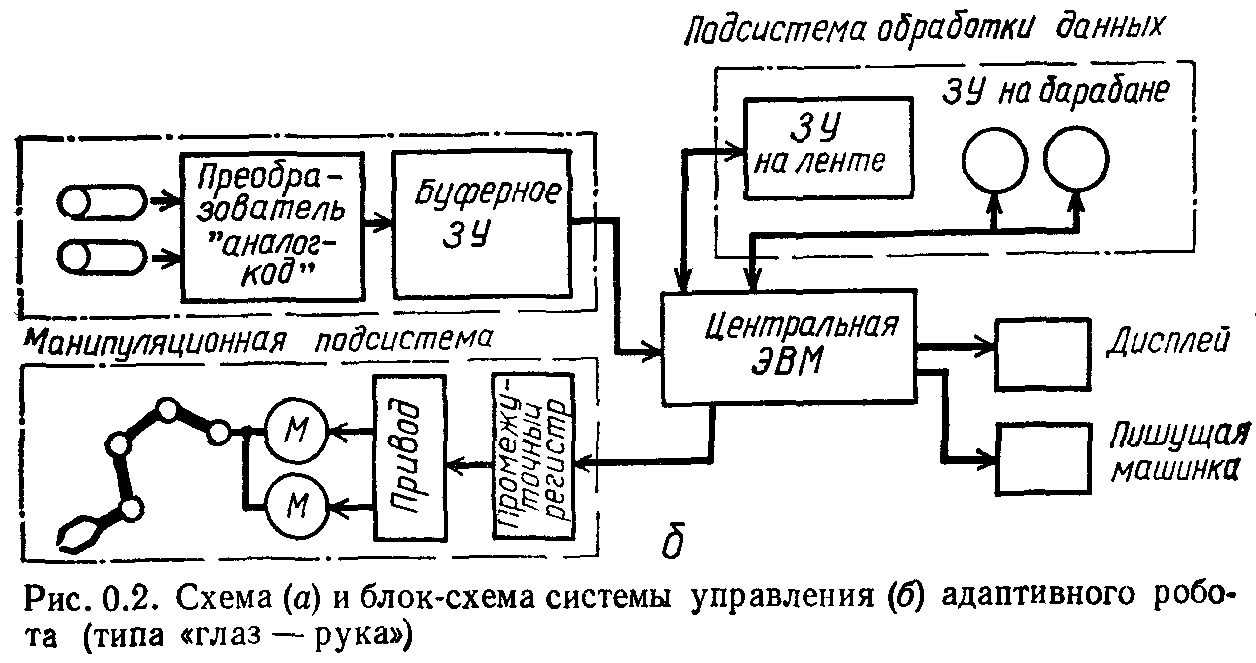
Як правило, система управління є спеціалізованою ЕОМ або управляючим обчислювальним комплексом (УВК). Часто адаптивні роботи називають системою «глаз— рука».
Структурна схема такого робота (мал. 0.2, і) включає власне маніпулятор важеля 7, телевізійну камеру 2 і стіл 3 з розташованими на ньому різними предметами. Спрощена блок-схема системи управління роботом типу «очей — рука» показана на мал. 0.2, би.

У третьому ж поколінні (интеллектные роботи) завдання на роботу вводиться людиною в більш загальній формі, а сам робот володіє можливістю ухвалювати рішення і планувати свої дії в розпізнаваній їм невизначеній або змінній обстановці, щоб зуміти виконати закладене в його пам'ять завдання (мал. 1.10). Отже, интеллектный робот володіє як би елементами штучного інтелекту, що полягають в сприйнятті невизначеної або змінної обстановки, обробці інформації про неї з метою вироблення і ухвалення рішення, планування дій і формування сигналів управління на приводи по всіх ступенях рухливості маніпулятора для реалізації необхідних рухів.
Треба помітити, що термін "покоління" не означає зміну одних поколінь роботів іншими у відмінність, наприклад, від поколінь обчислювальних машин. Кожне з них має самостійне значення і удосконалюватиметься по елементній базі і за своїми технічними даними. Кожне з трьох поколінь промислових роботів широко застосовуватиметься у відповідних умовах експлуатації. Тому термін "рід" замість "покоління" тут був би більш доречний.
Четвертого покоління немає, оскільки третє (интеллектні роботи) може в будь-яких необхідних формах нарощувати елементи штучного інтелекту у міру накопичення наших знань, технічних можливостей і потреб промисловості. Очевидно, що завжди залишиться значення вживання найпростіших програмних роботів (перше покоління), не дивлячись на появу більш досконалих адаптивних роботів (друге покоління).