

Дослідження трифазної асинхронної машини
Мета:|ціль| дослідження трифазної асинхронної машини; зняття механічної і робочих характеристик асинхронної машини.
Теоретичні положення
Принцип дії асинхронної машини. Асинхронною машиною (АМ) називається електромеханічний перетворювач, в якому відбувається|походить| перетворення енергії при швидкостях обертання ротора, відмінних|інших| від швидкості обертання магнітного поля в повітряному зазорі машини [4–6].
Залежно від конструктивного виконання ротора асинхронні машини підрозділяються на машини з|із| короткозамкненою роторною обмоткою, з|із| фазною обмоткою ротора і з|із| масивним феромагнітним ротором.
Асинхронні машини можуть виконуватися у вигляді однофазних, двофазних і трифазних машин.
В однофазних машинах обмотка статора створює в повітряному зазорі нерухоме в просторі і пульсуюче в часі за синусоїдальним законом магнітне поле. З цієї причини асинхронні машини не мають пускового моменту, і для пуску їх необхідно застосовувати додаткові конструктивні засоби|кошти|.
У двофазних і трифазних асинхронних машинах обмотка статора створює в повітряному зазорі обертове магнітне поле. Умовами створення|створіння| обертового поля є|з'являються,являються| наявність просторового зсуву осей фаз обмоток при виготовленні обмоток і живлення|харчування| цих обмоток системою змінних струмів|токів| з|із| часовим зсувом фаз. В АМ| з|із| короткозамкненим або фазним ротором обертове магнітне поле наводить на провідниках роторної обмотки ЕРС|, під дією яких в роторній обмотці починає|розпочинає,зачинає| протікати змінний струм|тік|.
Взаємодія магнітного поля із|із| струмами|токами| ротора обумовлює| появу електромагнітних сил, рознесених від осі обертання і спрямованих у напрямі обертання магнітного поля. Під дією цих сил виникає електромагнітний момент, який примушує|заставляє| ротор обертатися у напрямі магнітного поля. Різниця швидкостей обертання магнітного поля і ротора оцінюється безрозмірною величиною ковзання ротора s = (0 – )/0, де 0 – швидкість обертання магнітного поля, а – швидкість обертання ротора. Частота змінних ЕРС| та струмів|токів| ротора визначається величиною| ковзання f2 = f1s, де f1 і f2 – частоти змінних струмів|токів| статорної і роторної обмоток АМ| відповідно.
Швидкість обертання магнітного поля в повітряному зазорі АМ| однозначно визначається частотою мережі живлення|сіті| і числом пар полюсів машини рп: 0 = (2 f1) /рп |.
Змінні струми|токи| роторної обмотки також створюють обертове магнітне поле, яке при позитивній величині ковзання 0 > обертається відносно ротора у напрямі обертання ротора. Якщо ж ковзання негативне|заперечне| > 0, то це поле обертається проти|супроти| напряму|направлення| обертання ротора. Швидкість обертання поля струмів|токів| ротора п2 визначається співвідношенням
![]() .
.
У свою чергу швидкість обертання ротора залежно від величини ковзання визначається як = 0(1– s).
Таким чином, результуюча величина швидкості обертання магнітного поля ротора в повітряному зазорі
пр| = + п2 = 0(1– s) + 0s = 0,
тобто обертові магнітні поля струмів|токів| статора і ротора в повітряному зазорі нерухомі одне відносно одного. Це є|з'являється,являється| умовою перетворення потужності в електромеханічному перетворювачі.
Залежно від величини і знаку ковзання режими роботи АМ| поділяються на режими двигуна, генератора і гальмування противключенням|. Під час роботи в режимі двигуна відбувається|походить| перетворення електричної потужності, споживаної з|із| мережі,|сіті| в механічну потужність на валу АМ|.
У цьому режимі роботи величина ковзання змінюється в діапазоні 0 < s 1,0, тобто швидкість обертання ротора змінюється від нуля (s = 1,0) до швидкості, близької до швидкості обертання поля 0 (s 0). Електромагнітний момент спрямований у бік обертання ротора і є|з'являється,являється| причиною цього обертання.
У генераторному режимі роботи > 0 (ковзання негативне|заперечний|) АМ| перетворює механічну потужність, що підводиться до валу зовнішнім двигуном, в активну електричну потужність, що віддається в електричну мережу|сіть|. У той же час АМ| споживає з|із| мережі|сіті| реактивну потужність, необхідну для створення|створіння| магнітного поля в ній. Електромагнітний момент АМ| в генераторному режимі роботи є|з'являється,являється| гальмівним|гальмовим| і спрямований проти|супроти| напряму|направлення| обертання ротора.
У режимі гальмування противключенням| ротор АМ| за рахунок джерела зовнішніх сил обертається проти|супроти| напряму|направлення| обертання магнітного поля, тобто до АМ| одночасно підводиться електрична потужність з|із| мережі|сіті| і механічна потужність до її валу. Обидві ці складові потужності розсіюються в АМ| у вигляді втрат ковзання, створюючи значний гальмівний|гальмовий| момент, направлений|спрямований| проти|супроти| напряму|направлення| обертання ротора. Ковзання ротора АМ| в цьому режимі щодо|відносно| магнітного поля більше одиниці s = (0+ ) / 0 > 1,0.
В процесі перетворення енергії в асинхронному| двигуні (АД) мають місце співвідношення між електромагнітною Рем, споживаною Р1 і механічною Рмех потужностями та втратами ковзання рк:
Рем = Мем0 =Р1– рм1 – рст1;
Рмех = Мем = Рем (1– s);
рк = Рем – Рмех = Ремs.
Основні співвідношення схеми заміщення АД. Рівняння рівноваги напруг|напружень| статорного контуру АД і рівняння балансу МРС| подібні відповідним рівнянням трансформатора. Рівняння рівноваги напруг|напружень| роторного контуру АД враховує вплив величини ковзання на величини ЕРС| і індуктивного опору розсіяння ротора. З врахуванням цієї обставини рівняння АД з|із| обертовим ротором має вид:
![]() ;
;
![]() ;
;
![]() .
.
Після приведення параметрів ротора до кількості фаз і витків статорної обмотки, і до частоти струмів|токів| статора, рівняння АД матимуть вигляд|вид|
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Рис. 12.1 |

Для
спрощення розрахунку режимів роботи
АД використовують Г-подібну схему
заміщення з|із|
винесеним на затискачі мережі|сіті|
контуром намагнічування (рис. 12.2). В
цьому випадку І1=І2
і
![]() ,
а момент АД визначається співвідношенням
,
а момент АД визначається співвідношенням
![]() або
або
 .
.
Рис. 12.2 |

Ковзання, при якому момент досягає максимального значення, називається критичним sкр. Значення коефіцієнта с близько|поблизу| до одиниці, тому sкр можна визначити за формулою
 .
.
Величину
максимального моменту АД визначають
за формулою  .
.
При збільшенні величини додаткового активного опору в колі фазного ротора величина критичного ковзання асинхронної машини буде збільшуватись (рис. 12.3), а величина максимального (критичного) моменту залишається незмінною [4–6].
Рис. 12.3 |

Коефіцієнт корисної дії АМ| при роботи в режимах двигуна і генератора розраховують за співвідношеннями
![]() .
.
Завдання
1. Зняти і побудувати механічну характеристику машини в рушійному і генераторному режимах =f(M).
2. Зняти і побудувати робочі характеристики машини в рушійному режимі (, М, І1, , cos)=f(Р2).
3. Зняти механічні характеристики трифазної асинхронної машини з фазним ротором при зміні величини додаткового активного опору в колі ротора від 0 до 5Rs.
4. Побудувати механічні характеристики = f(M) при всіх значеннях величини додаткового активного опору в роторному колі.
5. Зробити висновки по роботі та отриманим результатам.
Вихідні дані
Параметри асинхронної машини для виконання роботи задаються викладачем, або вибираються із табл. 12.1 і розраховуються, користуючись паспортними даними.
![]() ;
;![]() ;
;![]() ;
Мн – номінальний момент
двигуна.
;
Мн – номінальний момент
двигуна.
Таблиця 12.1
Тип двигуна |
Рн, кВт |
nн, об/хв |
н, % |
cos |
Ін, А |
iп |
mп |
mmax |
J10–2, кгм2 |
RA71B2 |
0,55 |
2850 |
74 |
0,84 |
1,8 |
6,5 |
2,3 |
2,4 |
0,05 |
RA80A2 |
0,75 |
2820 |
74 |
0,83 |
2 |
5,3 |
2,5 |
2,7 |
0,08 |
RA80B2 |
1,1 |
2800 |
77 |
0,86 |
2 |
5,2 |
2,6 |
2,8 |
0,12 |
RA80A4 |
0,55 |
1400 |
71 |
0,8 |
1 |
5 |
2,3 |
2,8 |
0,18 |
RA80B4 |
0,75 |
1400 |
74 |
0,8 |
2 |
5 |
2,5 |
2,8 |
0,23 |
RA90S2 |
1,5 |
2835 |
79 |
0,87 |
3 |
6,5 |
2,8 |
3 |
0,10 |
RA90L2 |
2,2 |
2820 |
82 |
0,87 |
4 |
6,5 |
2,9 |
3,4 |
0,15 |
RA100LA4 |
2,2 |
1420 |
79 |
0,82 |
5 |
6 |
2,2 |
2,6 |
0,48 |
RA100LB4 |
3 |
1420 |
81 |
0,81 |
7 |
6,2 |
2,2 |
2,6 |
0,58 |
RA112M2 |
4 |
2895 |
84 |
0,87 |
9 |
6,8 |
2,2 |
3,3 |
0,82 |
RA112M4 |
4 |
1430 |
85,5 |
0,84 |
9 |
6,5 |
2,2 |
2,9 |
1,03 |
RA132SA4 |
5,5 |
2880 |
89 |
0,89 |
11 |
6,5 |
2,4 |
3 |
1,55 |
RA132SB2 |
7,5 |
2890 |
89 |
0,89 |
15 |
7 |
2,5 |
3,2 |
1,85 |
Хід виконання роботи
1. Зібрати розрахункову модель трифазної асинхронної машини з короткозамкненим ротором (рис. 12.4). Параметри моделі наведено на рис. 12.5. У блоках розрахунку діючого значення струму (RMS) та потужностей необхідно задати частоту 50 Гц.
3.2. Зняття механічної характеристики машини в рушійному і генераторному режимах проводиться при зміні моменту навантаження від –2,5 до +2,5 номінального значення. Для кожного значення моменту навантаження здійснюється моделювання. Результати досліджень заносити в табл. 12.2.
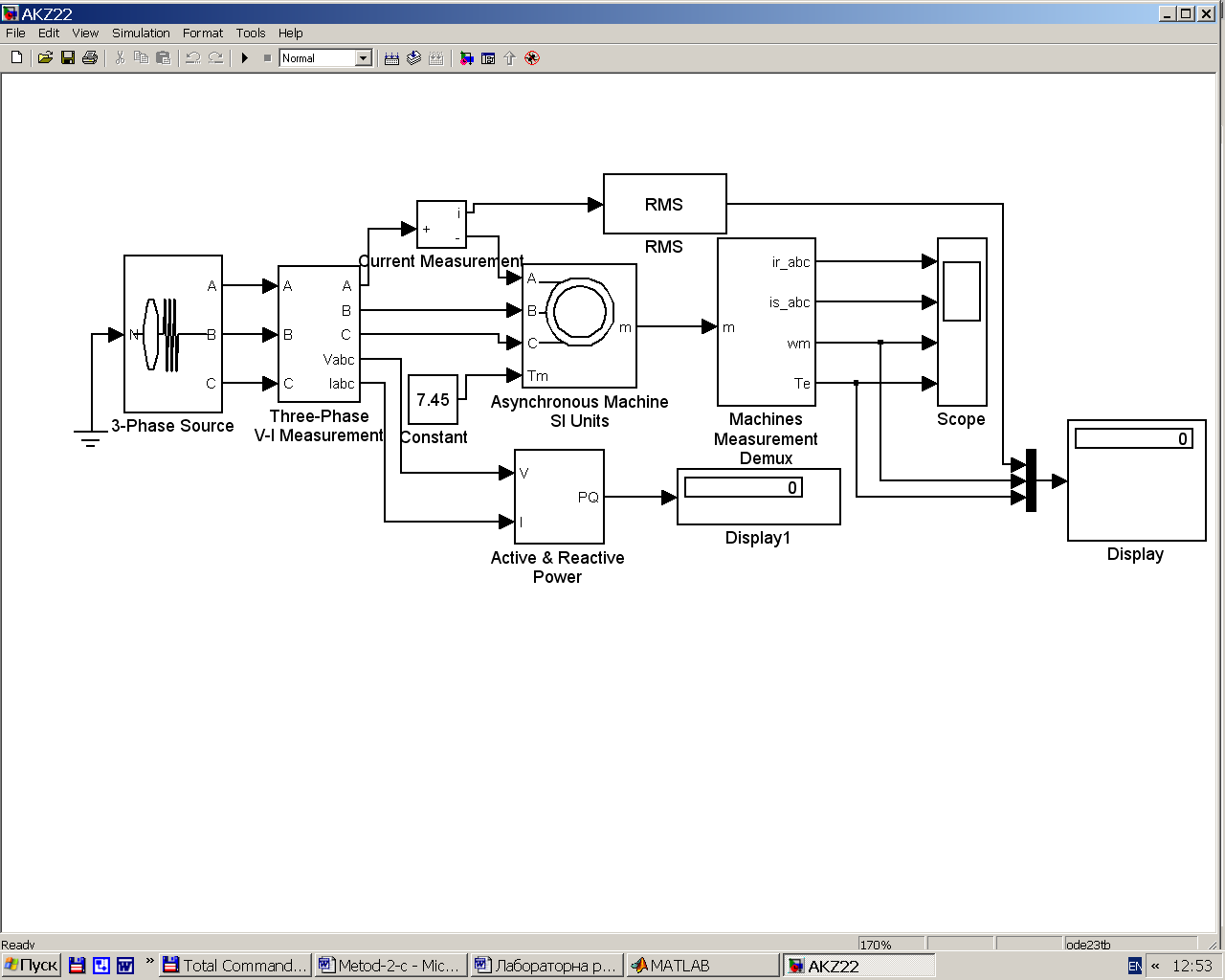
Рис. 12.4
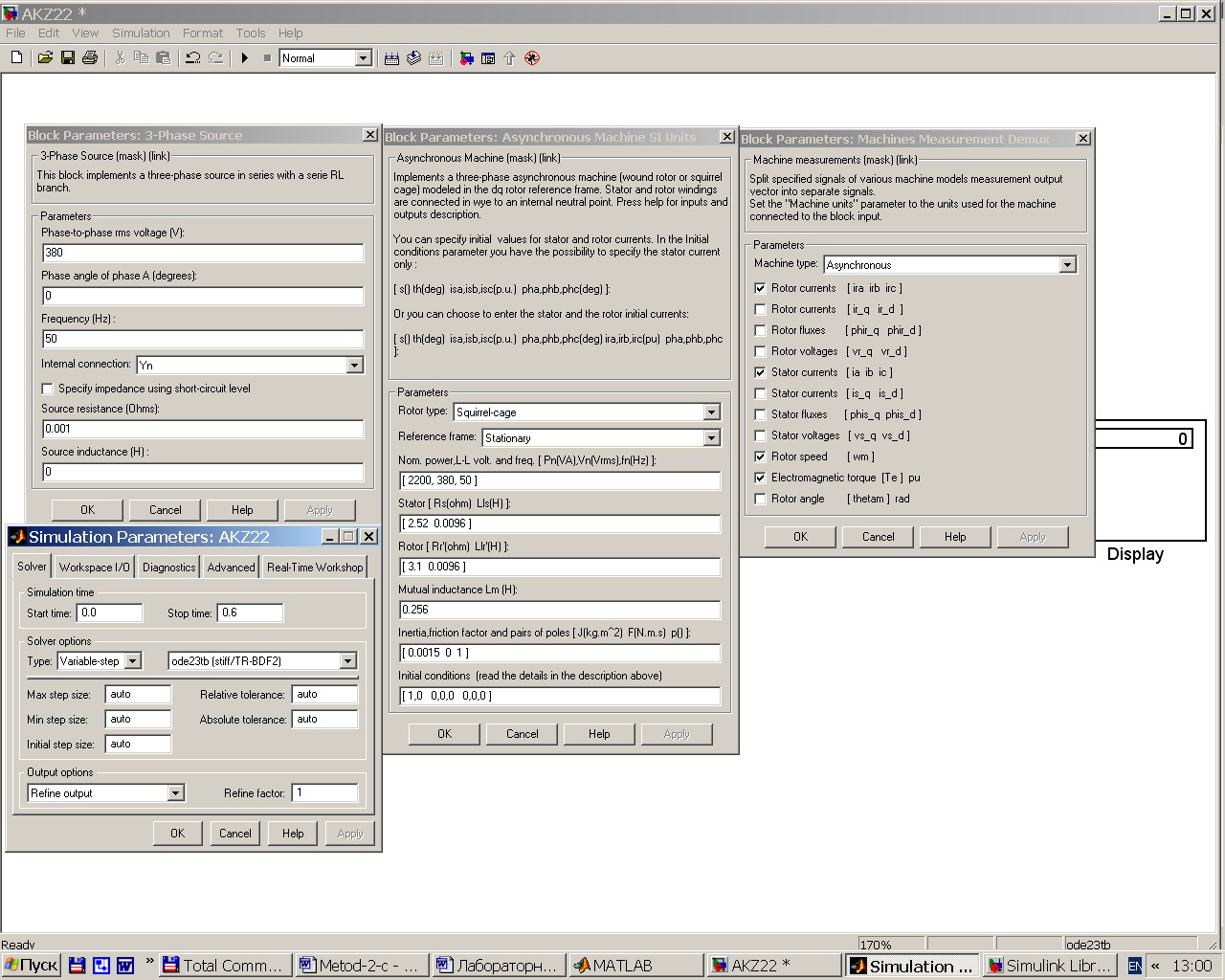
Рис. 12.5
Таблиця 12.2
М, Нм |
рад/с |
|
|
3. Зняття робочих характеристик машини в рушійному режимі проводиться моделюванням при зміні моменту навантаження від 0 до 2,5 номінального значення. Результати досліджень заносити в табл. 12.3.
Таблиця 12.3
М, Нм |
Вимірювання |
Обчислення |
|||||||||
Р1, Вт |
Q1, ВАр |
U1, В |
I1, А |
, рад/с |
φ, град. |
cos φ |
Р2, Вт |
η, % |
s, % |
||
|
|
|
|
|
|
|
|
|
|
|
|
Обчислення проводяться за формулами:
![]() ,
,
![]() ,
,
![]() .
.
4. В параметрах асинхронної машини (рис.12.5) змінити тип ротора (замість Sqirrel-cage встановити Wound).
5. Зняти механічні характеристики асинхронної машини з фазним ротром в рушійному режимі при зміні моменту навантаження від 0 до 2,4 номінального і зміні опору в колі ротора від Rs до 5Rs, де Rs – активний опір статора. Результати досліджень заносити в табл. 12.2.
6. За даними таблиць побудувати механічні характеристики машин і на окремому графіку – робочі характеристики.
7. Зробити висновки по роботі.
Контрольні питання
1. Що таке ковзання?
2. Які є режими роботи асинхронної машини?
3. Як залежить момент асинхронної машини від величини напруги живлення?
4. Що таке моментна характеристика асинхронної машини і які точки її характеризують?
5. Як впливає величина додаткового активного опору в колі ротора асинхронної машини на вигляд механічних характеристик?
Лабораторна робота 13