

Тема 2.2 Простейшие движения твердого тела
Иметь представление о поступательном движении, его особенности и параметрах, о вращательном движении тела и его параметрах.
Знать формулы для определения параметров поступательного и вращательного движений тела.
Уметь определять кинематические параметры тела при поступательном и вращательном движениях, определять параметры любой точки тела.
Поступательным называют такое движение твердого тела, при котором всякая прямая линия на теле при движении остается параллельной своему начальному положению.
При поступательном движении все точки тела движутся одинаково: скорости и ускорения в каждый момент одинаковы.
При поступательном движении тела прямая, соединяющая две произвольные точки тела, будет перемещаться параллельно самой себе. Примерами поступательного движения могут служить движение кузова автомобиля, который едет прямолинейно, движение кабины лифта, движение поршня в цилиндре двигателя и т. д. Докажем, что при поступательном движении все точки тела двигаются по одинаковым траекториям и имеют в любой момент времени одинаковые векторы скорости и ускорения. В теле, которое движется поступательно, возьмем две любые точки А и В (рис. 2.12). Соединим эти точки отрезком прямой линии. При перемещении тела длина этого отрезка остается постоянной, так как в кинематике рассматриваются абсолютно твердые тела. Через некоторый промежуток времени тело займет новое положение, а вместе с ним займет новое положение A1 В1 отрезок прямой линии АВ. Совершим теперь параллельный перенос всех точек траектории ВВ1 чтобы точка В заняла положение А. Так как отрезки прямых АВ и A1 В1 параллельны и равны друг другу, то очевидно, что при параллельном переносе точка В1 перейдет в точку A1. Такое рассуждение можно провести для любого положения В1 а значит при параллельном переносе траектория точки В полностью совпадает с траекторией точки А, т. е. они тождественны. Естественно, раз мы брали любые точки А и В, это справедливо для всех точек тела. Кроме этого, совпадает и положение точек А и В на этой траектории в любой момент времени (В1 тождественно A1). Если считать, что в начальный момент времени все точки тела находятся в начале отсчета своих траекторий, то законы движения точек А и В будут одинаковыми: sA =sB.
Продифференцируем это
равенство по времени:
![]() ,
или
,
или
![]() .
Следовательно, так как положение точек
А и
В произвольно,
то векторы скоростей всех точек в данный
момент времени равны друг другу.
Вектор v
называется вектором
скорости поступательного движения
тела.
.
Следовательно, так как положение точек
А и
В произвольно,
то векторы скоростей всех точек в данный
момент времени равны друг другу.
Вектор v
называется вектором
скорости поступательного движения
тела.
Если продифференцировать равенство (2.12) по времени, то получим
![]()
 ,
или
,
или
![]() .
.
т. е. векторы ускорений всех точек тела в данный момент времени равны друг другу. Вектор а называется вектором ускорения поступательного движения тела. Из выше доказанного следует, что поступательное движение твердого тела определяется движением одной его точки. Обычно за такую точку принимают центр тяжести тела. рис.2.12
Вращательное движение
Движение, при котором по крайнем мере точки твердого тела или неизменяемой системы остаются неподвижными, называемыми вращательным; прямая линия, соединяющая эти две точки, называется осью вращения.
 Вращательное
движение в технике встречается весьма
часто. В подавляющем большинстве
механизмов и машин имеются звенья,
которые совершают вращательное движение,
например, валы, зубчатые колеса, кривошипы
и т.д. Заметим, что понятие вращательного
движения может относиться только к
телу, но не к точке; так, например, движение
точки по окружности есть не вращательное
движение, а криволинейное.
Вращательное
движение в технике встречается весьма
часто. В подавляющем большинстве
механизмов и машин имеются звенья,
которые совершают вращательное движение,
например, валы, зубчатые колеса, кривошипы
и т.д. Заметим, что понятие вращательного
движения может относиться только к
телу, но не к точке; так, например, движение
точки по окружности есть не вращательное
движение, а криволинейное.
Если через ось вращения провести плоскость Р, жестко связанную с телом, то при вращении тела эта плоскость будет занимать новые положения (рис. 2.13). Угол между первоначальным положением плоскости Р и ее новым положением Р1 в текущий момент времени называется углом поворота тела и обозначается ср. Измеряется этот угол в радианах и считается положительным, если плоскость Р поворачивается против часовой стрелки (при этом надо смотреть с положительного конца оси z, направленной вдоль оси вращения тела). Кроме оси вращения для полного определения движения тела надо еще знать угол поворота φ как функцию времени t:φ=f(t) – закон вращательного движения тела. рис.2.13
Итак, при вращательном движении твердого тела точки его, находящиеся на различном расстоянии от оси вращения, имеют неодинаковые траектории, скорости и ускорения.
Отсюда следует, что линейное перемещение (путь), линейные скорость и ускорение точек не могут характеризовать вращательное движение тела в целом. Вращательное движение можно характеризовать углом φ, на который повернулось тело за данный промежуток времени. Этот угол называется угловым перемещением тела. Угловое перемещение выражается в радианах (рад) или оборотах (об); в последнем случае угловое перемещение обозначают N. Они связаны соотношением: φ =2πN (рад), N – число оборотов тела.
Путь любой точки вращающегося тела: s=rφ
Угловая скорость есть
кинематическая мера движения вращающегося
тела, характеризующая быстроту его
углового перемещения:![]() (
рад/с)
(
рад/с)
Линейная скорость любой точки вращающего тела определяется формулой: υ=ωr, т. е. скорость точки прямо пропорциональна ее расстоянию от оси вращения.
В технике скорость вращения часто вращения оборотах в минуту, обозначают буквой п и называют частотой вращения. Угловая скорость и частота вращения, выраженные соответственно в рад/с и мин-1, связаны соотношением:
ω=πn/30 (рад/с)
Изменение
угловой скорости во времени определяется
уголковым ускорением ε = рад /с²:
![]()
Вектор углового ускорения направлен вдоль оси вращения, при вращения тела модуль угловой скорости может уменьшаться или увеличиваться. В первом случае вращения будет замедленным, а втором – ускоренным. При ускоренном движении направление вектора ускорения совпадает с направлением вектора скорости, а при замедленном – векторы скорости и ускорения будут направлены в разные стороны.
Равномерным вращением тела
называется такое движение, при котором
угловая скорость вращения тела остается
постоянной. Если угловое ускорение тела
постоянно, то такое вращение называется
равнопеременным. Законы для равномерного
и равнопеременного вращений получаются
так же, как и аналогичные законы движения
точки, поэтому при равномерном движении
имеем:
![]() ,
где
,
где
![]() -
начальный угол поворота;
-
начальный угол поворота;
![]() -
постоянная уголовая скорость тела.
-
постоянная уголовая скорость тела.
Заменяя
![]() в на
в на
![]() ,
получим закон равнопеременного
движения:
,
получим закон равнопеременного
движения:![]() .
.
Здесь
— начальная угловая скорость. В любой
момент времени угловая скорость
будет определяться по формуле:
![]()
Если при равнопеременном вращении скорость и ускорение направлены в одну сторону, то вращение называется равноускоренным и соответственно если направления скорости и ускорения не совпадают, то равнозамедленным.
Частные случаи вращательного движения
Равномерное вращение (угловая скорость постоянна):
ω = const.
Уравнение (закон) равномерного вращения в данном случае имеет вид:
φ = φ0 + φt,
где φ0 — угол поворота до начала отсчета.
Кинематические графики для этого вида движения изображены на рис. 2.14.
 рис.2.14
рис.2.14
Равнопеременное вращение (угловое ускорение постоянно):
ε = const.
Уравнение (закон) равнопеременного вращения
![]() ,
,
где ω0 — начальная угловая скорость.
Угловое ускорение при ускоренном движении — величина положительная; угловая скорость
будет все время возрастать.
Угловое ускорение при замедленном движении — величина отрицательная; угловая скорость убывает.
Для данного движения кинематические
графики представлены на рис. 2.15.
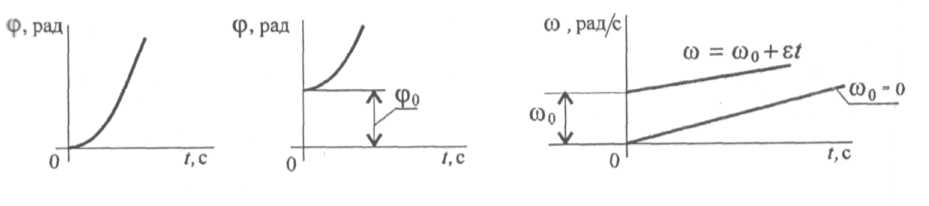 рис.
2.15
рис.
2.15
Скорости и ускорения точек вращающегося тела
Тело вращается вокруг точки О. Определим параметры движения точки Л, расположенной на
расстоянии г а от оси вращения (рис. 11.6, 11.7).


Рис.2.16
Путь точки А: SA = φrA.
Линейная скорость точки А: vA = ωrA.
Ускорение точки А: atA = εrA – касательное; : atA = εrA
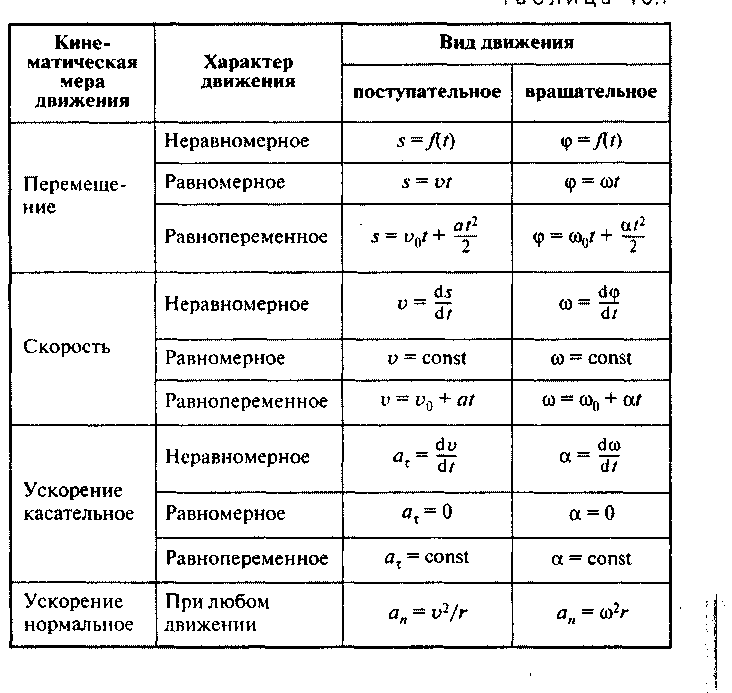
Сравнение формул кинематики для поступательного и вращательного движений
Преобразование вращательного движения
Преобразование вращательного движения осуществляется разнообразными механизмами, которые называются передачами. Наиболее распространенными являются зубчатые и фрикционные передачи, а также передачи гибкой связью (например, ременные, канатные, ленточные и цепные). С помощью этих механизмов осуществляется передача вращательного движения от источника движения (ведущего вала) к приемнику движения (ведомому валу).
Передачи характеризуются передаточным отношением или передаточным числом.
Передаточным отношеньем i называется отношение угловой скорости ведущего звена к угловой скорости ведомого звена. Передаточное отношение может быть больше, меньше или равно единице.
Передаточным числом и двух сопряженных звеньев называется отношение большей углевой скорости к меньшей. Передаточное число передачи всегда больше или равно единице.
В целях унификации обозначений
передаточные отношения и передаточные
числа всех передач мы будем обозначать
буквой «и», в некоторых случаях с двойным
индексом, соответствующим индексам
звеньев передачи:
![]() .
.
Заметим, что индекс 1 приписывают параметрам ведущего звена передачи, а индекс 2 — ведомого.
Передача, у которой угловая скорость ведомого звена меньше угловой скорости ведущего, называется понижающей в противном случае передача называется повышающей.
В технике наибольшее распространение получили: 1) зубчатые, 2) ременные и 3) цепные передачи.
1. Общие сведения о простейших зубчатых передачах их основных видах, а также конструктивных элементах зубчатых колес, реек и червяков известны из курса черчения. Рассмотрим зубчатую передачу, схематически изображенную на рис. 2.17.
В месте соприкосновения
зубчатых колес I
и II
скорости точек первого и второго
колеса одинаковы. Обозначив модуль этой
скорости v,
получим
![]() .
Следовательно, можно записать так:
.
Следовательно, можно записать так:![]() .
.
Из курса черчения известно,
что
диаметр делительной
окружности зубчатого колеса равен
произведению его
модуля на число
зубьев: d
= mz.
Тогда
для пары зубчатых
колес:
![]()

Рис.2.17
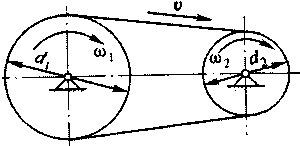
рис.2.18
проскальзывания ремня по шкивам ,следовательно, для ременной передачи .
Для цепных передач
 ,
,
 где
число зубьев ведущей передачи и ведомой
звездочек передачи.
где
число зубьев ведущей передачи и ведомой
звездочек передачи.