

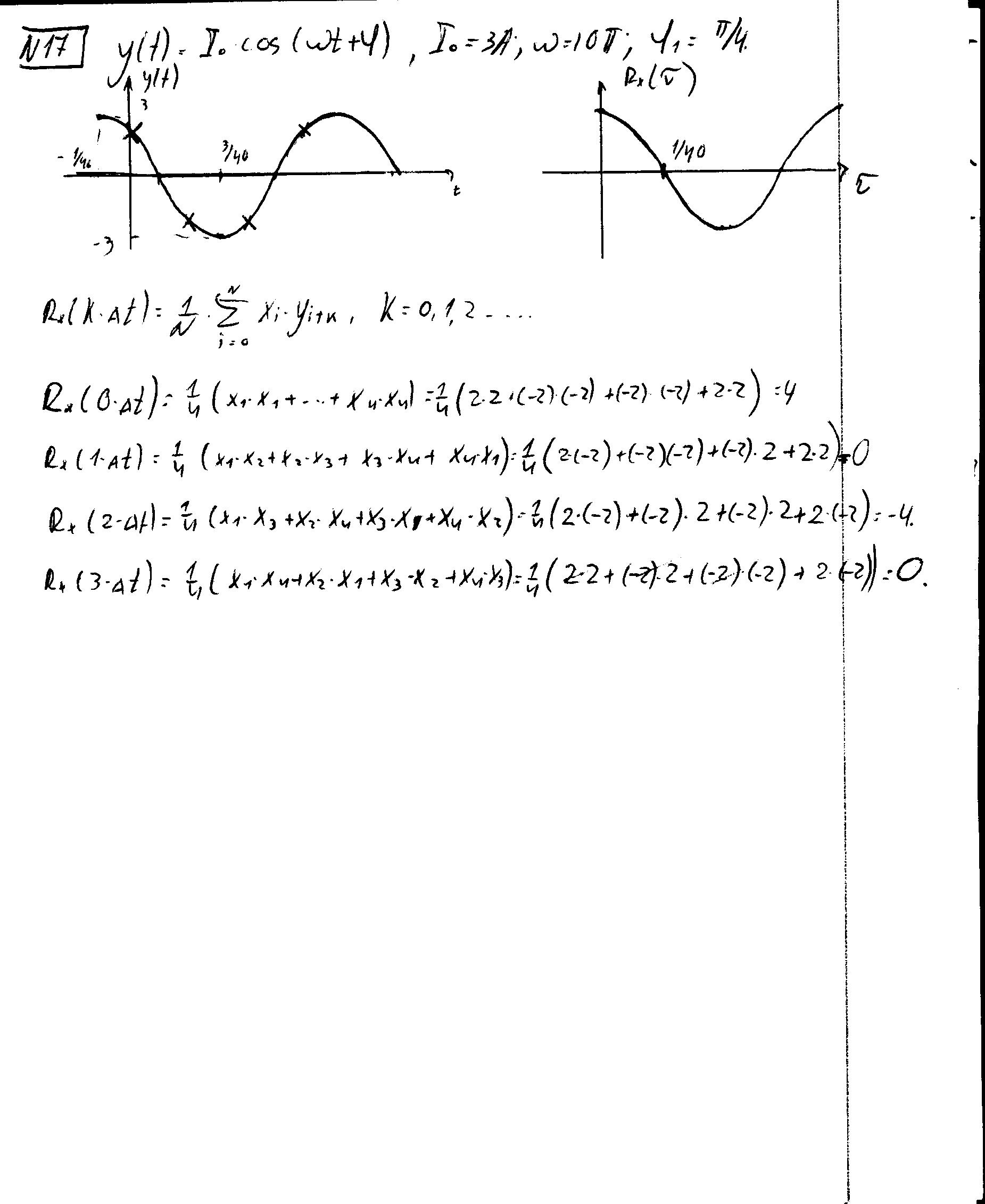
5. Розрахувати і побудувати автокореляційну функцію з використанням алгоритму цифрової обробки для такого сигналу:
y(t)= 0 cos (t + ),
де 0=3А; =10, с-1; = .
№18
1. Посередні вимірювання з однократними спостереженнями аргументів
До
таких вимірювань відносяться такі, які
базуються на прямих вимірюваннях з
однократними спостереженнями. Величини,
які при цьому однократно вимірюються,
називаються вимірюваними аргументами.
Передбачається, що залежність посередньо
вимірюваної величини
 від аргументів
від аргументів
 є відомою, тобто
є відомою, тобто
 ,
(5.50)
,
(5.50)
де
 —
кількість аргументів, від яких залежить
.
Результати вимірювання аргументів
повинні бути взаємоузгодженими, тобто
відповідати одному і тому ж значенню
вимірюваної величини
.
—
кількість аргументів, від яких залежить
.
Результати вимірювання аргументів
повинні бути взаємоузгодженими, тобто
відповідати одному і тому ж значенню
вимірюваної величини
.
Обробка
даних вказаної категорії вимірювань
обумовлена формою представлення
результатів вимірювань аргументів та
видом залежності від них вимірюваної
величини
.
Результат посереднього вимірювання —
це оцінка величини
 що знаходиться шляхом підстановки у
залежність (5.50) оцінок аргументів:
що знаходиться шляхом підстановки у
залежність (5.50) оцінок аргументів:
 .
(5.51)
.
(5.51)
Для оцінки похибки результату посереднього вимірювання з однократними спостереженнями суттєвим є вид залежності (5.50), яка може бути як лінійною, так і нелінійною. Розглянемо лінійну залежність виду:
 ,
(5.52)
,
(5.52)
де
 — постійні коефіцієнти. Нехай похибки
результатів вимірювань аргументів
задані своїми абсолютними границями
— постійні коефіцієнти. Нехай похибки
результатів вимірювань аргументів
задані своїми абсолютними границями
 При
малій кількості аргументів (
<
5) проста та надійна оцінка похибки
При
малій кількості аргументів (
<
5) проста та надійна оцінка похибки
 отримується шляхом підстановки границь
в (5.52), тобто
отримується шляхом підстановки границь
в (5.52), тобто
 .
(5.53)
.
(5.53)
При більшій кількості аргументів гранична оцінка
 згідно
(5.52) може бути завищеною, тому рекомендується
перейти до статистичного сумування
похибок аргументів. Це основано на
допущенні про рівномірний розподіл
похибок аргументів в заданих границях.
При цьому довірча границя
похибки результату посереднього
вимірювання буде визначатися по формулі:
згідно
(5.52) може бути завищеною, тому рекомендується
перейти до статистичного сумування
похибок аргументів. Це основано на
допущенні про рівномірний розподіл
похибок аргументів в заданих границях.
При цьому довірча границя
похибки результату посереднього
вимірювання буде визначатися по формулі:
 ,
(5.54)
,
(5.54)
де
 — залежить від довірчої ймовірності
(див. табл. 2.1). Однак в цьому випадку
необхідно порівнювати отриману оцінку
згідно (5.54) з оцінкою, отриманою згідно
(5.53) та вибирати меншу з них.
— залежить від довірчої ймовірності
(див. табл. 2.1). Однак в цьому випадку
необхідно порівнювати отриману оцінку
згідно (5.54) з оцінкою, отриманою згідно
(5.53) та вибирати меншу з них.
Розглянемо
випадок, коли для похибок результатів
вимірювання аргументів задані довірчі
границі. Ці границі можуть відповідати
однаковим або різним довірчим ймовірностям
 .
Якщо ймовірності для всіх аргументів
є однаковими (
.
Якщо ймовірності для всіх аргументів
є однаковими ( )
і можна вважати, що розподіл похибок
всіх аргументів є нормальним, то довірча
похибка результату посереднього
вимірювання визначається так:
)
і можна вважати, що розподіл похибок
всіх аргументів є нормальним, то довірча
похибка результату посереднього
вимірювання визначається так:
 .
(5.55)
.
(5.55)
Якщо довірчі ймовірності для кожного із аргументів є різними, то довірча похибка результату посереднього вимірювання оцінюється так:
 ,
(5.56)
,
(5.56)
де
 та
—
довірчі коефіцієнти, які відповідають
розподілам похибок аргументів і
результату вимірювання при довірчих
ймовірностях
та
—
довірчі коефіцієнти, які відповідають
розподілам похибок аргументів і
результату вимірювання при довірчих
ймовірностях
 та
.
Похибки результатів вимірювання
аргументів можуть бути заданими не
тільки границями, а й параметрами
систематичних та випадкових складових
- їх довірчими границями і СКВ. Якщо
представити похибку результату
вимірювання кожного аргумента як суму
систематичної
та
.
Похибки результатів вимірювання
аргументів можуть бути заданими не
тільки границями, а й параметрами
систематичних та випадкових складових
- їх довірчими границями і СКВ. Якщо
представити похибку результату
вимірювання кожного аргумента як суму
систематичної
 та випадкової
та випадкової
 складових, то, підставивши в (5.53) вирази
оцінок аргументів через істинні значення
та похибки, отримаємо такий вираз для
похибки результату:
складових, то, підставивши в (5.53) вирази
оцінок аргументів через істинні значення
та похибки, отримаємо такий вираз для
похибки результату:
 , (5.57)
, (5.57)
де суми — це відповідно систематична та
випадкова
складові результату посереднього
вимірювання. Таким чином, в розглянутому
випадку оцінюють окремо сумарні
систематичні та випадкові складові
похибки результатів посереднього
вимірювання, а потім обєднюють
отримані оцінки. Що стосується сумування
систематичних складових, то воно може
бути здійснене залежно від інформації
про розподіл похибок за допомогою
(5.52)...(5.56), в які замість границь для
похибок вимірювання аргументів
 слід підставляти необхідні границі
для систематичних складових похибок
слід підставляти необхідні границі
для систематичних складових похибок
 .
.
Випадкову складову похибок результату посереднього вимірювання розраховують таким чином.
Якщо випадкові похибки вимірювань аргументів є некорельованими, то дисперсія похибки результату вимірювання буде такою:
 ,
(5.58)
,
(5.58)
де
 — дисперсії похибок вимірювання
аргументів. Аналогічне співвідношення
є справедливим для дисперсій:
— дисперсії похибок вимірювання
аргументів. Аналогічне співвідношення
є справедливим для дисперсій:
 .
(5.59)
.
(5.59)
В загальному випадку можлива кореляція між випадковими похибками вимірювань аргументів, яка обумовлена впливом на вимірювання одних і тих же факторів, наприклад, умов вимірювання. При цьому оцінка дисперсії похибки буде такою:
 .
(5.60)
.
(5.60)
де
 – коефіцієнт кореляції між і
– им
і j
– им
аргументами.
– коефіцієнт кореляції між і
– им
і j
– им
аргументами.
Розглянемо
оцінку похибки результату посереднього
вимірювання для нелінійної залежності
(5.50). В основі цієї оцінки лежить метод
лінеаризації, тобто розкладу функції
 в ряд Тейлора і виділення лінійної
частини ряду. Хоча ряд Тейлора не є
найкращим щодо відношення швидкості
сходимості, однак він використовується
для оцінки похибок посередніх вимірювань.
Це пояснюється, крім традиції, ще
порівняно невисокими вимогами до
точності оцінки похибок, про що було
сказано раніше.
в ряд Тейлора і виділення лінійної
частини ряду. Хоча ряд Тейлора не є
найкращим щодо відношення швидкості
сходимості, однак він використовується
для оцінки похибок посередніх вимірювань.
Це пояснюється, крім традиції, ще
порівняно невисокими вимогами до
точності оцінки похибок, про що було
сказано раніше.
Розклад
функції
в ряд Тейлора слід було б проводити в
околиці точки ( ,
де
,
де
 —
істинні значення аргументів. Однак
через відсутність таких значень
рекомендується використовувати для
розкладу точку
—
істинні значення аргументів. Однак
через відсутність таких значень
рекомендується використовувати для
розкладу точку
( ,
яка визначається результатами вимірювань
аргументів. При цьому використовується
відхилення істинних значень аргументів
від їх оцінок
,
яка визначається результатами вимірювань
аргументів. При цьому використовується
відхилення істинних значень аргументів
від їх оцінок
 і за допомогою ряду оцінюють істинне
значення
і за допомогою ряду оцінюють істинне
значення
 (
.
Тому отримаємо, що
(
.
Тому отримаємо, що
 ,
(5.61)
,
(5.61)
де
 —
залишковий член розкладу в ряд Тейлора,
який розраховує мо так.
—
залишковий член розкладу в ряд Тейлора,
який розраховує мо так.
 .
.
Критерій нехтування залишковим членом такий:
якщо умова
 ,
(5.62)
,
(5.62)
де
 —
оцінка дисперсії похибок результатів
спостережень аргументів буде виконуватися,
то результат вимірювання слід розраховувати
згідно виразу (5.61). Похибка вимірювання
тоді буде такою:
—
оцінка дисперсії похибок результатів
спостережень аргументів буде виконуватися,
то результат вимірювання слід розраховувати
згідно виразу (5.61). Похибка вимірювання
тоді буде такою:
 .(5.63)
.(5.63)
Якщо
умова (5.62) не виконується, то тоді
 буде більшим від виразу (5.63) на величину
.
буде більшим від виразу (5.63) на величину
.
В
загальному випадку через наявність
оцінка буде зміщеною навіть при
відсутності систематичних похибок
вимірювання аргументів, однак при малому
оцінку можна вважати незміщеною. Якщо
оцінки значень аргументів є визначальними,
то
 є також визначальним. При значному
значенні
його можна зменшити, включивши у виділену
частину ряду квадратичні члени. Зміщення
оцінки
можна усунути введенням поправки,
визначеної дисперсіями оцінок аргументів.
є також визначальним. При значному
значенні
його можна зменшити, включивши у виділену
частину ряду квадратичні члени. Зміщення
оцінки
можна усунути введенням поправки,
визначеної дисперсіями оцінок аргументів.
Після
лінеаризації виразу (5.50) обробка даних
зводиться до процедур, які використовуються
для лінійної залежності (5.52). Роль
коефіцієнтів
 виконують при цьому часткові похідні
виконують при цьому часткові похідні
 .
.
Слід відмітити один вид нелінійної залежності, коли оцінка похибок визначається досить просто. Це степеневі одночлени виду:
 . (5.64)
. (5.64)
В
цьому випадку після лінеаризації зручно
перейти до віднос-них похибок
 .
Після цього отримаємо, що
.
Після цього отримаємо, що
 ,
(5.65)
,
(5.65)
тобто відносна похибка лінійно виражається через відносні похибки аргументів. Причому коефіцієнти складових членів виразу (5.65) дорівнюють показникам степеней одночлена (5.64). Таким чином оцінка відносних похибок виконується за допомогою тих самих формул, які приведені для лінійної залежності (5.52). Зокрема, СКВ відносної похибки результату вимірювання для випадку нелінійної незалежності (5.64) оцінюють так:
 . (5.66)
. (5.66)