

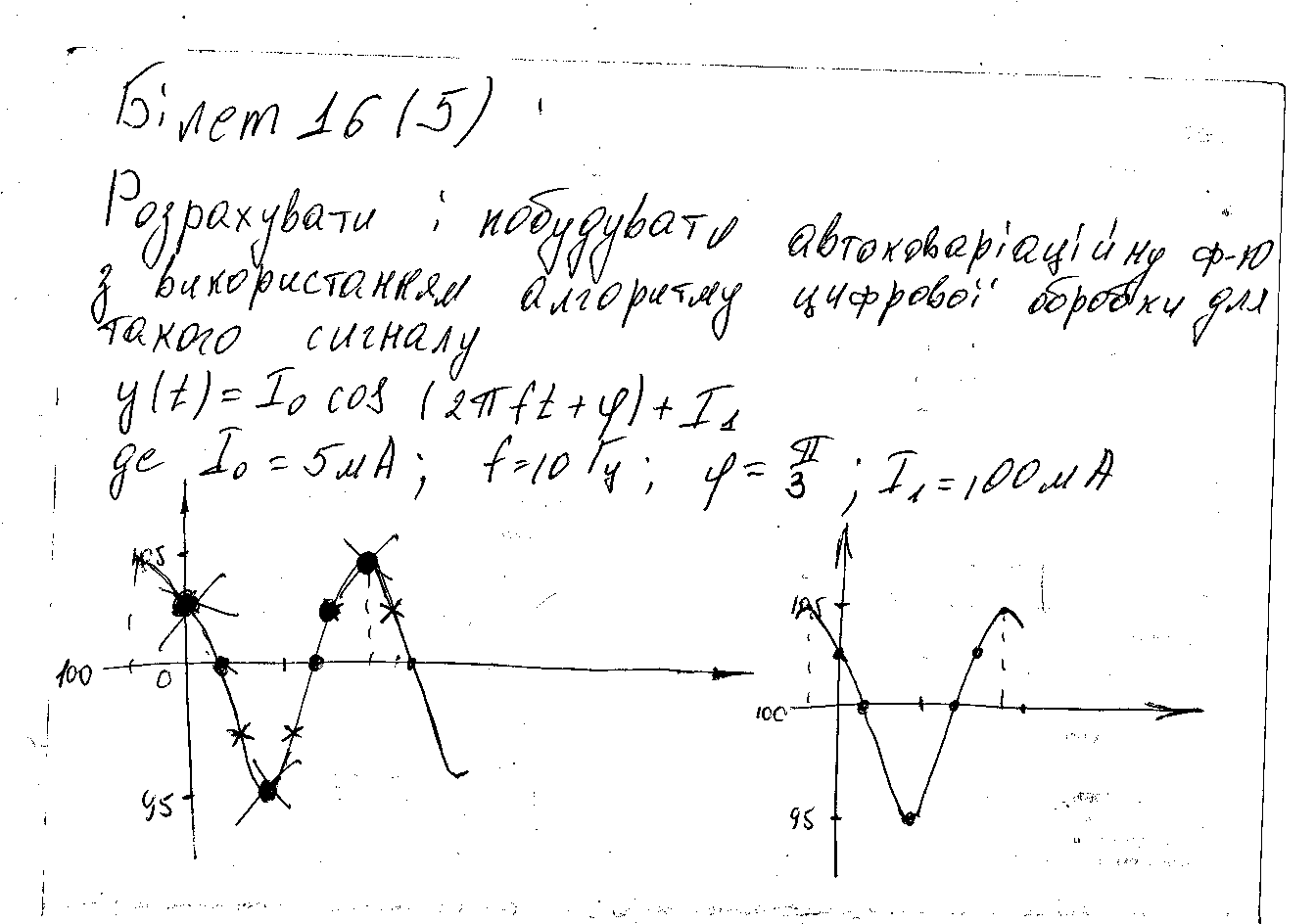
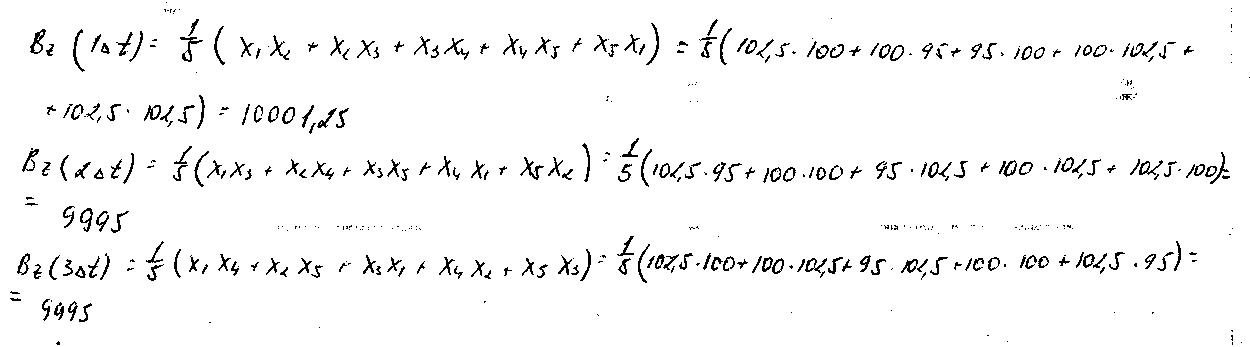
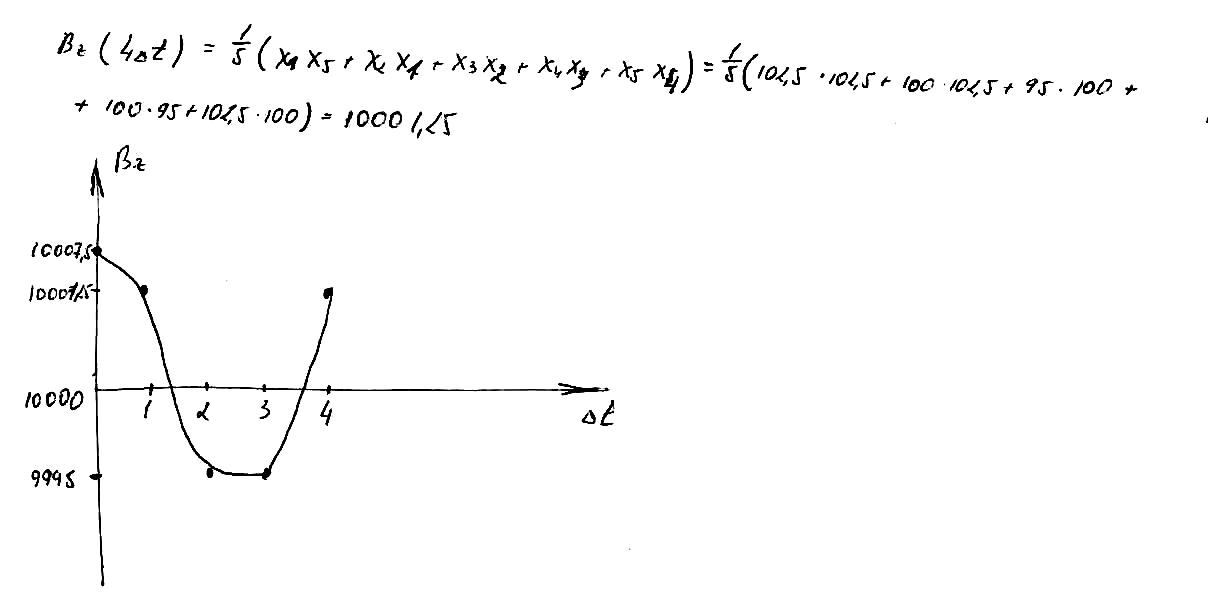
5. Розрахувати і побудувати авковаріаційну функцію з використанням алгоритму цифрової обробки для такого сигналу:
y(t)=0 cos (2ft + ) + 1,
де 0=5мА; f=10Гц; = ; 1=100мА.

№17
1. Обробка результатів прямих вимірювань з однократними спостереженнями аргументів
Прямі однократні вимірювання проводять з кількістю спостережень не більше трьох. Мають місце ситуації, коли спостереженнятільки одне. Це пов’язане з помилкою об’єкту вимірювання, наприклад при дослідженні його механічних властивостей. Так як повторне спостереження передбачає мету додаткового контрою, то в подальшому буде розглядатись вимірювання з одним спостереженням, маючи на увазі, що результат такого спостереження не містить грубої похибки.
Прямі однократні вимірювання в процесі обробки вимагають значної кількості наперед відомої апріорної інформації. До такої апріорної інформації відносять:
аналіз факторів, що впливають на процес вимірювання;
визначення систематичної складової похибки вимірювання;
визначення величини поправки, яку необхідно вводити в результат вимірювання;
оцінка метрологічних характеристик засобу вимірювання;
вибір методики проведення вимірювання.
проводять однократен вимірювання і отримують значеннявідліку водиницях вимірюваної величини.
вводять поправку в кожний з результатів спостережень однократного вимірювання.
розраховують в залежності від апріорної інформації і отриманого в пункті 2 скорегованого результату однократного вимірювання необхідного значення для запису кінцевого результату.
3.1
відомо, що вимірювання даної фізичної
величини описується нормальним законом
розподілу. Відомо СКВ результату
вимірювання
 .
Відома задана величина похибки х.
.
Відома задана величина похибки х.

розраховують коефіцієнт довіри

за допомогою таблиць знаходять для заданого
 значення
значення або
або

значення ймовірності розраховують таким чином
 або
або

записують результат вимірювань таким чином:
 ]
]
4.2.
Відомі НЗР,
 .
х
–?
.
х
–?
За допомогою інтегральних таблиць Лапласа або інтегральної функції розподілу знаходять значення параметру .

4.3. Відомі , х. НЗР є невідомим.
розраховуємо коефіцієнт довіри .

– теорема Чебишева.
4.4.
Відомий клас точності приладу – с,

 ,
N
– нормоване значення фізичної величини,
до якого вказаний клас точності
,
N
– нормоване значення фізичної величини,
до якого вказаний клас точності
2 Перетворювачі Холла. Чутливість, градуювальна характеристика.
Перетворювач Холла - це
переважно провідна пластина визначеної
конфігурації, яка виконана з провідника
чи напівпровідника і оснащена декількома
електродами, для під'єднання перетворювача
до джерела живлення (струмові електроди)
і до пристрою вимірювання е.р. с. Холла
(холлівські електроди). Суть ефекту
Холла полягає в наступному. Якщо
прямокутну пластину помістити в магнітне
поле перпендикулярно вектору напруженості
і пропускати по ній струм в напрямі
інших граней, то на третій (поперечній)
парі граней виникає е.р.с Холла
 :
:
 (8.1)
(8.1)
де RХ – постійна Холла, Ом × м/Тл;
ІХ - керуючий струм перетворювача Холла, А;
d - товщина пластинки, м;
Вn - нормальна складова вектора магнітної індукції, Тл.
Конструктивне виконання і геометричні розміри як провідної пластини, так і електродів можуть бути досить різноманітними. На рис. 8.1 зображені декілька найбільш поширених конструкцій перетворювачів Холла. Буквою “т” позначені струмові електроди, а буквою “х” — холлівські.
Найчастіше з метою рівномірного розподілу струму струмові електроди наносяться по всій ширині відповідної грані активної пластини перетворювача (рис. 8.1 , а - в). Однак таке конструктивне рішення не є обов'язковим. Іноді має сенс виконання струмових електродів у вигляді певного числа окремо припаяних провідників (рис. 8.1 , г). Холлівські електроди найчастіше мають вигляд крапкових контактів (рис. 8.1 , а - г). Щодо конфігурації активної пластини перетворювача, то, крім найбільш поширеної прямокутної, виготовляються також перетворювачі хрестоподібної форми у виді рівностороннього восьмикутника (рис. 8.1 , д і е) або інших форм.
Розміри активної пластини перетворювача і їхнє співвідношення роблять дуже істотний вплив на ряд параметрів перетворювачів: чутливість, вигляд градуювальної характеристики, допустиму потужність, що розсіюється, і т. п. Шунтуючий вплив струмових електродів може бути зменшений, якщо вони виконані у виді ряду крапкових електродів (рис. 8.1 , г). Однак, якщо врахувати, що геометричні розміри перетворювача Холла, як правило, не перевищують декількох міліметрів, то стає очевидним, що реалізувати таку конструкцію на практиці дуже важко.
Значення
е.р.с Холла холлівського перетворювача
з суцільними струмовими електродами
може бути визначене як добуток е.р.с
Холла нескінченно довгого перетворювача
 на деяку функцію
його геометричних розмірів і значення
магнітної індукції В0:
на деяку функцію
його геометричних розмірів і значення
магнітної індукції В0:
 ,
(8.2)
,
(8.2)
де
 - е.р.с при живленні перетворювача від
джерела струму
І або
- е.р.с при живленні перетворювача від
джерела струму
І або
 - е.р.с при живленні перетворювача від
джерела напруги U;
- е.р.с при живленні перетворювача від
джерела напруги U;
RX – постійна Холла;
d - товщина пластини перетворювача Холла;
u – рухомість носіїв заряду;
 -
узагальнений параметр перетворювача;
-
узагальнений параметр перетворювача;
l, a, s, t - геометричні розміри активної пластини перетворювача і його електродів (рис. 8.2).
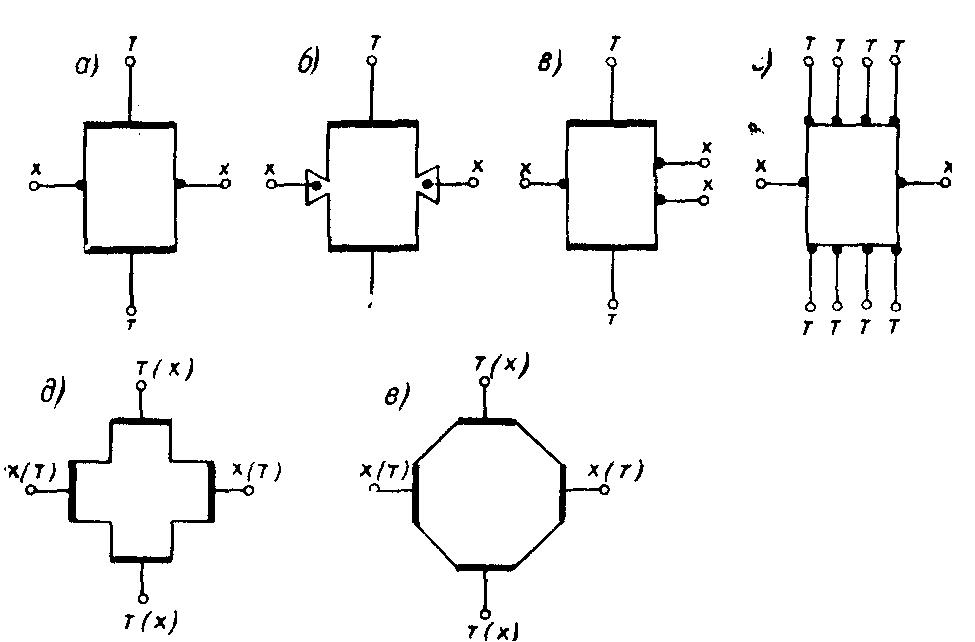
Рисунок 8.1 - Варіанти конструктивного виконання активної пластини і електродів перетворювача Холла
Залежність
функції
від добутку
 пояснюється ефектом магнітоопору, який
викликає збільшення омічного опору
пластини перетворювача в магнітному
полі, що еквівалентно збільшенню
відношення
пояснюється ефектом магнітоопору, який
викликає збільшення омічного опору
пластини перетворювача в магнітному
полі, що еквівалентно збільшенню
відношення
 і збільшенню відношення
і збільшенню відношення
 .
Таким
чином, в режимі заданого струму:
.
Таким
чином, в режимі заданого струму:
 ,
(8.3)
,
(8.3)
а в режимі заданої напруги:
 .
(8.4)
.
(8.4)
Якщо
 , то залежністю функції
від аргументів
і t
можна знехтувати. В
цьому випадку функція
може бути зображена за допомогою
сімейства кривих, які вказані на рис.
8.3. Як видно з графіків, при відношенні
довжини перетворювача до його ширини
, то залежністю функції
від аргументів
і t
можна знехтувати. В
цьому випадку функція
може бути зображена за допомогою
сімейства кривих, які вказані на рис.
8.3. Як видно з графіків, при відношенні
довжини перетворювача до його ширини
 функція
при нульових значеннях інших її аргументів
в (8.3) і (8.4) досягає значення 0.93, так що
подальше збільшення відношення
функція
при нульових значеннях інших її аргументів
в (8.3) і (8.4) досягає значення 0.93, так що
подальше збільшення відношення
 не викликає помітного збільшення .
не викликає помітного збільшення .
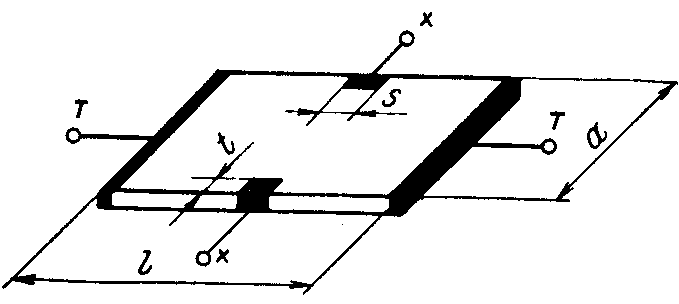
Рисунок 8.2 - Геометричні розміри прямокутного перетворювача Холла
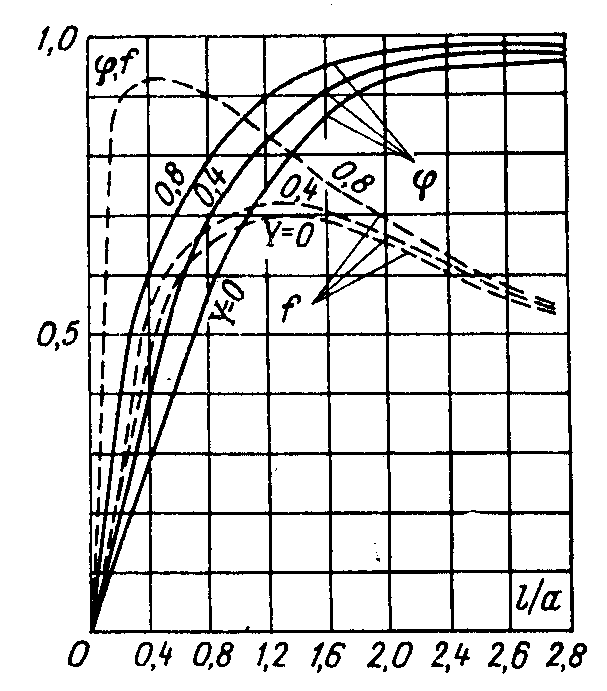
Рисунок
8.3 - Графіки функцій
 і
і

При виборі оптимального значення відношення (для випадку, коли немає яких-небудь особливих умов) можна виходити з двох основних принципів: 1) отримання максимального значення е.р.с Холла; 2) забезпечення якнайбільш лінійної градуювальної кривої.
Для визначення оптимального значення , яке відповідає максимальній чутливості перетворювача Холла, виразимо е.р.с Холла для режиму заданого струму і для режиму заданої напруги через допустиму потужність, яка розсіюється, геометричні розміри перетворювача і параметри напівпровідника. В обидвох випадках отримаємо:
 ,
(8.5)
,
(8.5)
де
 - оптимізаційна функція.
- оптимізаційна функція.
Очевидно,
що оптимальне значення
повинно відповідати максимуму функції
 .
З графіків функції
на рис. 8.3 видно, що її максимальне
значення має місце при
.
З графіків функції
на рис. 8.3 видно, що її максимальне
значення має місце при
 і зсувається для менших значень
при збільшенні параметра Y. Це цілком
природно, якщо враховувати збільшення
опору перетворювача в магнітному полі
внаслідок ефекту магнітоопору.
і зсувається для менших значень
при збільшенні параметра Y. Це цілком
природно, якщо враховувати збільшення
опору перетворювача в магнітному полі
внаслідок ефекту магнітоопору.
При вимірюванні магнітної
індукції сильних полів, як правило,
чутливість перетворювача Холла суттєвого
значення не має. Тут на перше місце
висуваються вимоги до точності
вимірювального приладу, яка в значній
мірі визначається лінійністю градуювальної
кривої. Одними з основних факторів
нелінійності градуювальної кривої
перетворювача Холла є залежність від
магнітної індукції значення постійної
Холла (якщо перетворювач живиться від
джерела струму) або рухомості носіїв
заряду (якщо перетворювач живиться від
джерела напруги), а також від видів
функції
 .
.
На
рис. 8.4 показано вид декількох типових
градуювальних характеристик холлівських
перетворювачів (в режимі заданого
струму). Крива 1 відповідає перетворювачам
Холла з великим відношенням
,
у яких шунтуюча дія електродів практично
ніяк не виявляється. Чутливість таких
перетворювачів, яка визначається
похідною ,
найчастіше (але не обов’язково)
зменшується із збільшенням магнітної
індукції, що пов’язане із зміною
постійної Холла. При цьому характер
функції
,
найчастіше (але не обов’язково)
зменшується із збільшенням магнітної
індукції, що пов’язане із зміною
постійної Холла. При цьому характер
функції
 може бути досить різноманітним, оскільки
він залежить не тільки від типу
напівпровідника, але деколи, як наприклад,
у германію, і від напряму виростання
напівпровідникового злитку. Криві 2 і
3 характерні для перетворювачів Холла
з малим відношенням
.
В цьому випадку на вид градуювальної
кривої здійснює вплив не тільки зміна
може бути досить різноманітним, оскільки
він залежить не тільки від типу
напівпровідника, але деколи, як наприклад,
у германію, і від напряму виростання
напівпровідникового злитку. Криві 2 і
3 характерні для перетворювачів Холла
з малим відношенням
.
В цьому випадку на вид градуювальної
кривої здійснює вплив не тільки зміна
 ,
але і зміна функції .
,
але і зміна функції .
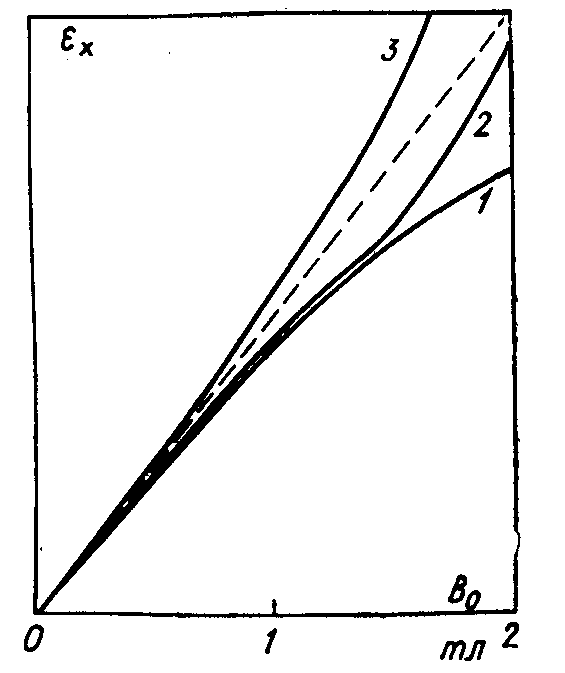
Рисунок 8.4 - Градуювальні криві перетворювачів Холла
Отже,
в залежності від співвідношення
геометричних розмірів і властивостей
напівпровідникового матеріалу чутливість
може зменшуватися або збільшуватися
як у різних зразків перетворювачів, так
і в межах одного зразка при різних
діапазонах зміни
 .
В останньому випадку градуювальна крива
перетворювача Холла може мати перегин.
Оскільки
і u зменшуються, а функція
зростає із збільшенням
,
то є можливість до деякого ступеня
компенсувати ці впливи, підбираючи
найбільш вигідні з цієї точку зору
відношення
і
.
В останньому випадку градуювальна крива
перетворювача Холла може мати перегин.
Оскільки
і u зменшуються, а функція
зростає із збільшенням
,
то є можливість до деякого ступеня
компенсувати ці впливи, підбираючи
найбільш вигідні з цієї точку зору
відношення
і
 .
.
В
літературі [9] подаються такі формули
для розрахунку оптимальних співвідношень
 при
при
 Так, при живленні перетворювача Холла
від джерела струму:
Так, при живленні перетворювача Холла
від джерела струму:
 ,
(8.6)
,
(8.6)
а при живленні перетворювача від джерела напруги:
 ,
(8.7)
,
(8.7)
де
с,
 ,
,
 - параметри робочих умов перетворювачів
Холла, які визначаються з виразів:
- параметри робочих умов перетворювачів
Холла, які визначаються з виразів:
 ,
,
 ,
,
 ;
;
 -
значення постійної Холла і рухомості
носіїв заряду при магнітних індукціях
-
значення постійної Холла і рухомості
носіїв заряду при магнітних індукціях
 і
і
 ,
які відповідають початку і кінцю
діапазону, який лінеаризується.
,
які відповідають початку і кінцю
діапазону, який лінеаризується.
Формули
(8.6), (8.7) носять наближений характер, бо
в них не враховано вплив холлівських
електродів (тобто відношення
),
який проявляється найбільше при
 і також може бути використаний з метою
лінеаризації градуювальної кривої.
і також може бути використаний з метою
лінеаризації градуювальної кривої.
Очевидно,
що чутливість перетворювача Холла не
буде взагалі залежати від магнітної
індукції
(тобто
 )
тільки в тому випадку, якщо відносна
зміна постійної Холла
)
тільки в тому випадку, якщо відносна
зміна постійної Холла
 (при живленні перетворювача від джерела
струму) або відносна зміна рухомості
носіїв заряду
(при живленні від джерела напруги) будуть
рівні по абсолютному значенню і протилежні
за знаком відносної зміни функції
у всьому діапазоні зміни
.
Так як функціональні залежності
,
(при живленні перетворювача від джерела
струму) або відносна зміна рухомості
носіїв заряду
(при живленні від джерела напруги) будуть
рівні по абсолютному значенню і протилежні
за знаком відносної зміни функції
у всьому діапазоні зміни
.
Так як функціональні залежності
,
 і
і
 мають різний характер, то добитися
повної компенсації практично вдається
лише в якихось двох точках діапазону
зміни
,
при цьому коефіцієнт нелінійності всієї
градуювальної кривої коливається в
широкому діапазоні від десятих долей
до одиниць відсотків.
мають різний характер, то добитися
повної компенсації практично вдається
лише в якихось двох точках діапазону
зміни
,
при цьому коефіцієнт нелінійності всієї
градуювальної кривої коливається в
широкому діапазоні від десятих долей
до одиниць відсотків.
8.2 Чутливість і коефіцієнти передавання перетворювачів Холла
Одним
з основних параметрів перетворювача
Холла є його чутливість до зміни магнітної
індукції
 ,
під якою розуміють значення похідної
при заданому значенні струму живлення
або напруги, прикладеної до струмових
електродів. Чутливість
перетворювача Холла до магнітної
індукції в режимі заданого струму
становить:
,
під якою розуміють значення похідної
при заданому значенні струму живлення
або напруги, прикладеної до струмових
електродів. Чутливість
перетворювача Холла до магнітної
індукції в режимі заданого струму
становить:
 ,
(8.8)
,
(8.8)
а в режимі заданої напруги:
 .
(8.9)
.
(8.9)
Допустимий струм живлення перетворювача Холла і допустима прикладена напруга можуть бути розраховані за формулами:
 ;
(8.10)
;
(8.10)
 ,
(8.11)
,
(8.11)
де
 і
і
 - значення питомої провідності і опору
між струмовими електродами перетворювача
Холла, які відповідають тому максимальному
значенню магнітної індукції, для
вимірювання якої передбачається
використовувати даний перетворювач;
- значення питомої провідності і опору
між струмовими електродами перетворювача
Холла, які відповідають тому максимальному
значенню магнітної індукції, для
вимірювання якої передбачається
використовувати даний перетворювач;
- коефіцієнт тепловіддачі;
 -
допустима температура перегріву
перетворювача Холла.
-
допустима температура перегріву
перетворювача Холла.
Значення
вибирається виходячи з механічної
міцності перетворювача Холла або з
міркувань, пов’язаних з температурною
стабільністю параметрів перетворювача.
Слід зазначити, що обчислення
 і
і
 по наведених формулах пов’язане із
значними труднощами через велику
кількість погано враховуваних факторів,
які впливають на коефіцієнт тепловіддачі
.
Зважаючи на це
і
найчастіше визначаються експериментально
(при заданій температурі навколишнього
середовища і значенні
по наведених формулах пов’язане із
значними труднощами через велику
кількість погано враховуваних факторів,
які впливають на коефіцієнт тепловіддачі
.
Зважаючи на це
і
найчастіше визначаються експериментально
(при заданій температурі навколишнього
середовища і значенні
 )
шляхом зняття характеристики
)
шляхом зняття характеристики
 .
На
рис. 8.5 зображено типовий вигляд такої
характеристики. Як видно з графіка,
починаючи від деякого визначеного
значення струму живлення, характер
залежності
стає різко нелінійним, що пояснюється
нагрівом пластини перетворювача і
зменшенням значення постійної Холла.
Так як відносна зміна чутливості
в даному випадку рівна відносній зміні
постійної Холла
.
На
рис. 8.5 зображено типовий вигляд такої
характеристики. Як видно з графіка,
починаючи від деякого визначеного
значення струму живлення, характер
залежності
стає різко нелінійним, що пояснюється
нагрівом пластини перетворювача і
зменшенням значення постійної Холла.
Так як відносна зміна чутливості
в даному випадку рівна відносній зміні
постійної Холла
 (де
(де
 - температурний коефіцієнт постійної
Холла), то прийнявши
- температурний коефіцієнт постійної
Холла), то прийнявши
 і знаючи
,
можна обчислити допустиме значення
і знаючи
,
можна обчислити допустиме значення
 ,
а потім за допомогою графіка
визначити
.
,
а потім за допомогою графіка
визначити
.
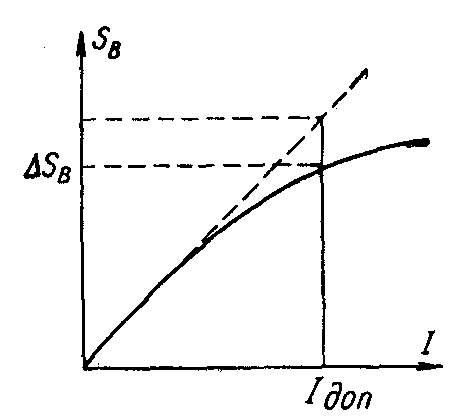
Рисунок 8.5 - Залежність чутливості перетворювача Холла від струму живлення