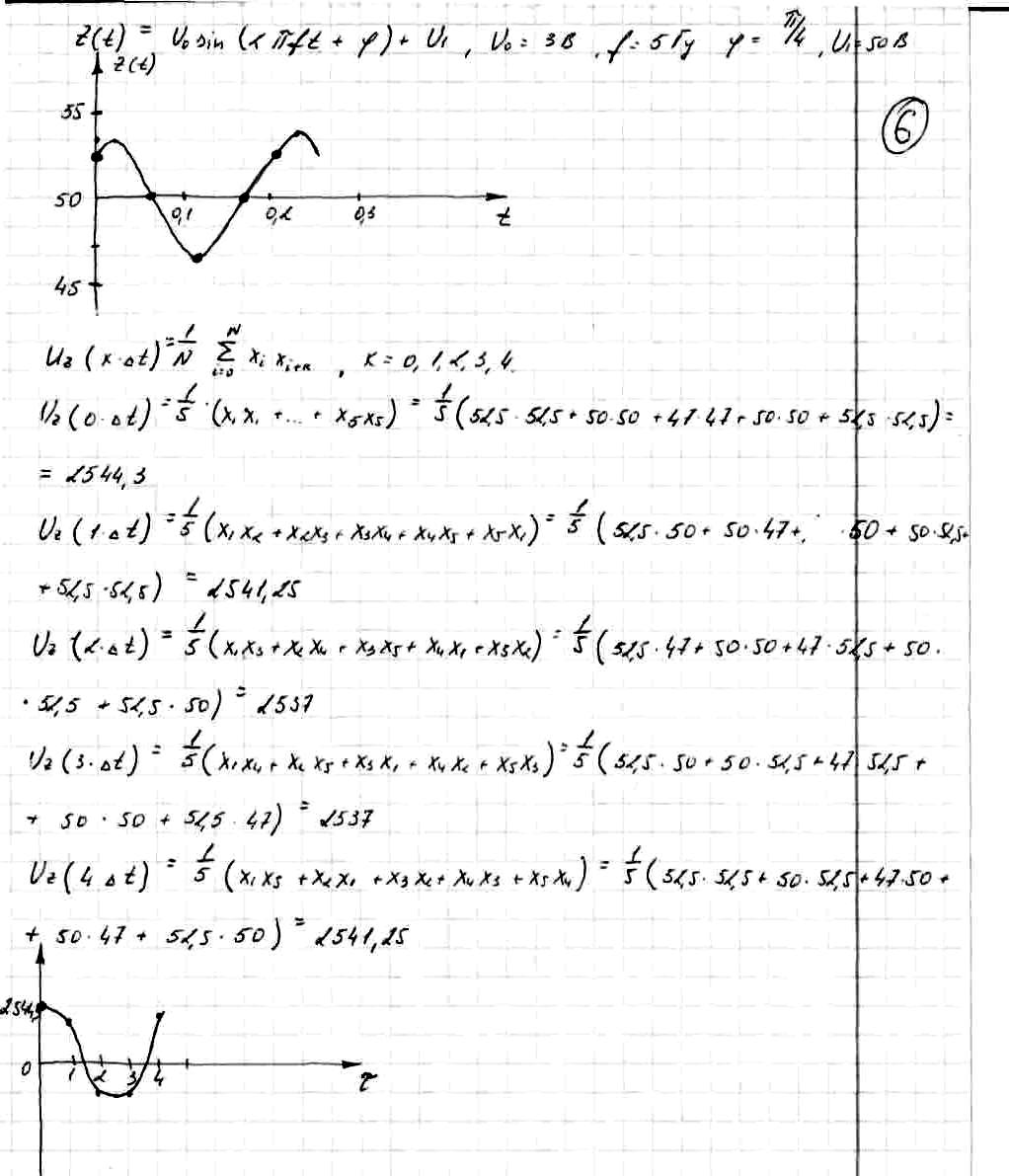
5.Розрахувати і побудувати автоковаріаційну функцію з використанням алгоритму цифрової обробки для такого сигналу:
Х(t) = U0 sin (2ft + ) + U1, де U0=3B; f=5 Гц; = ; U1=50B.
№7
1.Здійснити порівняльну оцінку буйкових та поплавкових рівнемірів.
11.2 Поплавкові рівнеміри
Поплавкові рівнеміри є найбільш прості за конструкцією. На рис 11.2 представлені рівнеміри вузького та широкого діапазону. В рівнемірах вузького діапазону (рис. 11.2 а,б) кулькоподібний поплавок плаває на поверхні рідини і через штангу і сальниковий пристрій з’єднується або із стрілкою вимірювального приладу або з перетворювачем 1 кутових переміщень в уніфікований пневматичний чи електричний сигнал. В залежності від способу установки рівнемірів на технологічних апаратах розрізняють фланцеві (рис. 11.2, а) і камерні (рис. 11.2, б) рівнеміри. Максимальний діапазон вимірювання – 200…0…200 мм. Клас точності 1,5. Поплавкові рівнеміри широкого діапазону (рис. 11.2, в) представляють собою поплавок 1, зв’язаний з противагою 4 гнучким тросом 2. В нижній частині противаги укріплена стрілка, яка вказує по шкалі 3 значення рівня рідини. Максимальний діапазон вимірювання – 0-20 м. Абсолютна похибка вимірювання 10 мм.

11.3 Буйкові рівнеміри
В основу функціонування покладено зміну ваги тіла, частково зануреного в рідину, в залежності від рівня рідини (закон Архімеда). Матеріал, з якого виготовлене тіло (буйок), має більшу густину, ніж густина рідини. Маса буйка, частково зануреного в рідину, змінюється пропорційно зміні рівня.
Розрізняють пневматичні і електричні буйкові рівнеміри. Пневматичний рівнемір (рис.11.3) працює таким чином. Якщо рівень рідини відповідає початковому h0, вимірювальне коромисло 2 знаходиться в рівновазі. Коли рівень рідини стає більший h0, частина буйка занурюється в рідину, вага поплавка зменшується, зменшується момент М1, який створюється буйком на важелі 2. Так як момент М2, створюваний противагою N стає меншим моменту М1, важіль 2 повертається навколо точки О за годинниковою стрілкою і прикриває заслінкою 7 сопло 8. Тому тиск в лінії сопла збільшується. Цей тиск поступає в пневматичний підсилювач 10, вихідний сигнал якого є вихідним сигналом рівнеміра. Цей же сигнал одночасно посилається в сильфон від’ємного зворотнього зв’язку 5. При дії тиску Рвих виникає сила R, момент М3 якої співпадає за напрямком з моментом М1, тобто дія сили R направлена на відновлення рівноваги важеля 2. Рух вимірювальної системи перетворювача відбувається до тих пір, поки сума моментів всіх сил, які діють на важіль 2, не стане рівною нулю.
Початкове значення вихідного сигналу задається пружиною 6. Для забезпечення відсутності автоколивань вимірювальної системи рівнеміра служить демпфер 4. Герметизація технологічного апарату досягається ущільнювальною мембраною 3. Максимальна верхня границя вимірювання пневматичних рівнемірів – 16 м.

Рисунок 11.3 – Схема буйкового пневматичного рівнеміра .
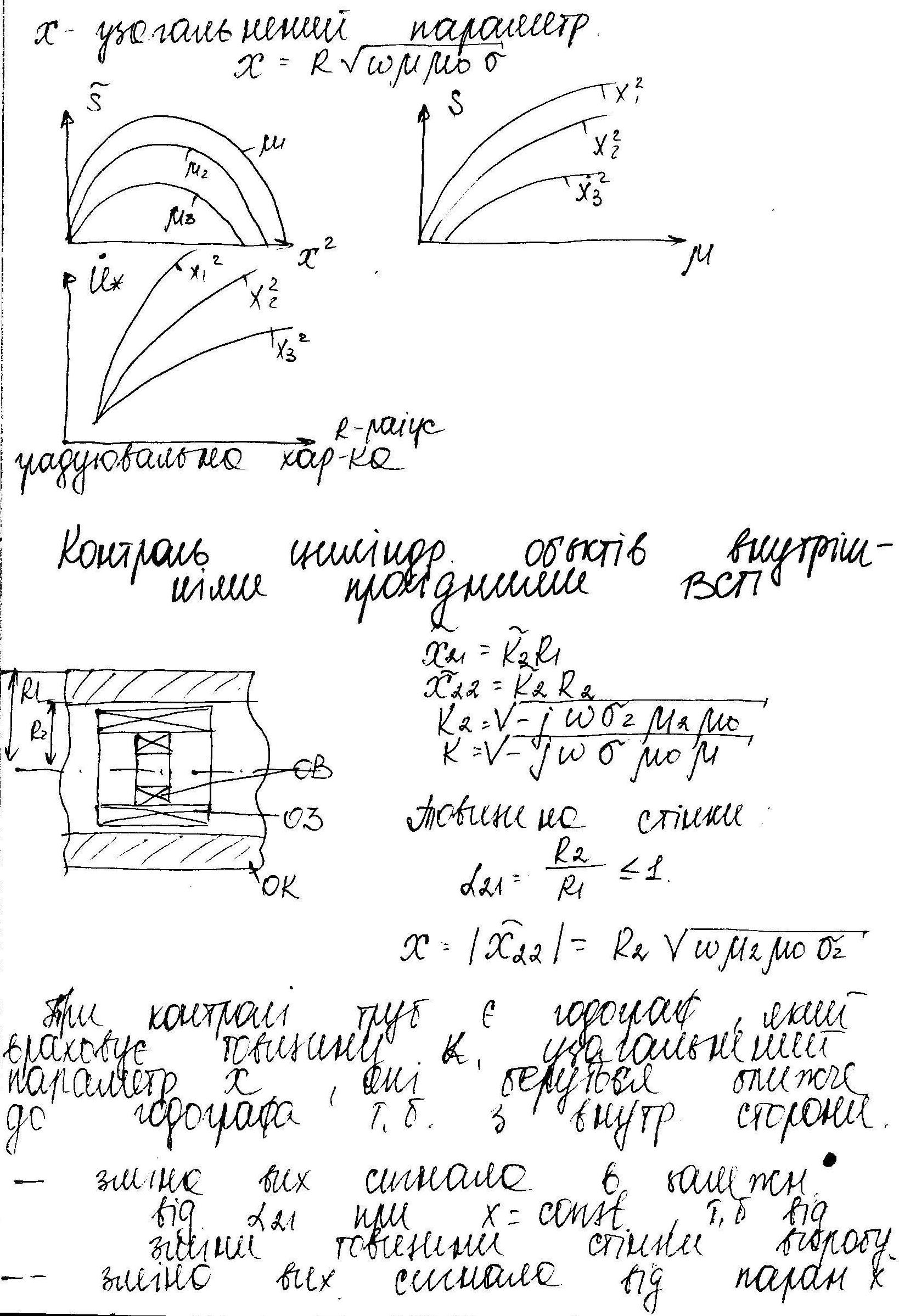
2.Фізичні основи, конструкція і область застосування методу контролю виробів внутрішніми прохідними всп.