

5. Расчет механических нагрузок, приведенных к валу двигателя
Грузоподъемность 16 т
В случае если груз перемещается только в горизонтальном направлении
1.Рассчитываем статическую нагрузку по формуле

Vн.г – макс. скорость горизонтального перемещения груза (м/с)
Q – масса стрелы и груза.
ή – кпд редуктора
2.Рассчитываем момент нагрузки по формуле
 Н*м
Н*м
Грузоподъемность 16 т
1.Рассчитываем статическую нагрузку по формуле

Vн.г – макс. скорость горизонтального перемещения груза (м/с)
Q – масса стрелы и груза.
ή – кпд редуктора
2.Рассчитываем момент нагрузки по формуле
 Н*м
Н*м
По данным расчета можно сделать вывод о том, что момент нагрузки изменяется незначительно – на 30 единиц и не достигает номинального значения. Следовательно, это не повлияет на перегрузочную способность данного привода и несущественно исказит переходные характеристики.
6. Расчет пускового реле и построение механической характеристики при переключении скоростей.
Так как для асинхронных двигателей с фазным ротором пуск, реверс, торможение, регулирование скорости необходимо осуществлять
при наложенных на ток и момент ограничениях, то, как следует из анализа механических и электромеханических характеристик разгон двигателя до естественной характеристики следует производить через промежуточные пусковые характеристики.
Характеристика с максимальным сопротивлением роторной цепи необходима для выбора минимального зазора (предотвращение динамического удара зубчатых передач) т.к имеет наименьшую скорость.
За момент переключения возьмем значение пускового момента 5 характеристики. Мпер=533,802 Н*м.Все броски моментов
при переходе двигателя на новую технологическую характеристику
должны быть равны допустимому моменту. В данной ситуации это возможно только при максимальном пиковом моменте Mmax пуск=838,428 Н*м.
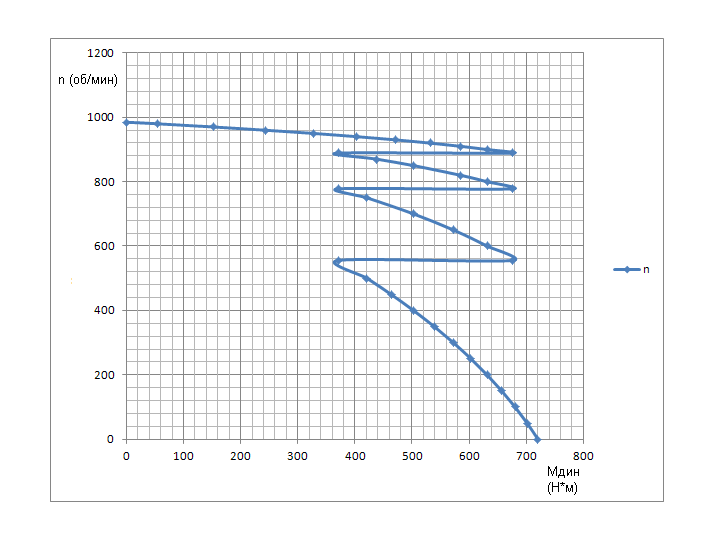
Результаты расчета и построения пусковых характеристик представлены на графике .Ниже на рисунке показана диаграмма переключения пусковых сопротивлений и их влияние на механические характеристики в первом случае.
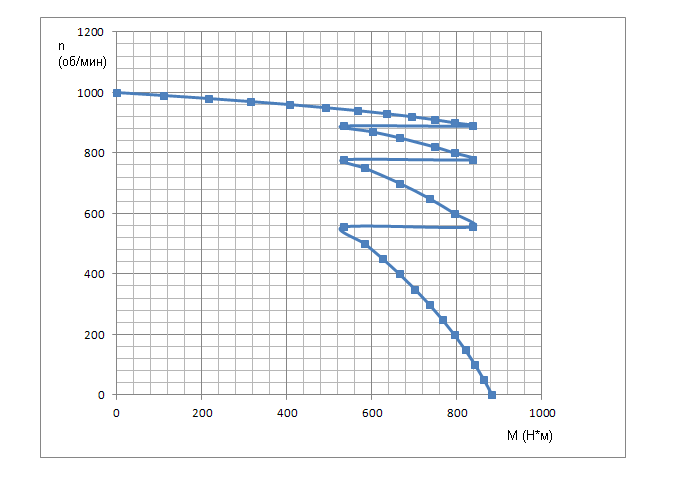
 Как
видно из графика пуск двигателя начинается
с 4 характеристики и заканчивается на
е.х. При достижении определенного момента
(момента переключения) срабатывает реле
времени и происходит закорачиваниеконтактов
КП и КУ (на принципиальной схеме). Для
того чтобы настроить реле на определенное
время срабатывания нужно рассчитать
переходной процесс при ступенчатом
пуске двигателя с 4хар - ки на Е.Х.
Как
видно из графика пуск двигателя начинается
с 4 характеристики и заканчивается на
е.х. При достижении определенного момента
(момента переключения) срабатывает реле
времени и происходит закорачиваниеконтактов
КП и КУ (на принципиальной схеме). Для
того чтобы настроить реле на определенное
время срабатывания нужно рассчитать
переходной процесс при ступенчатом
пуске двигателя с 4хар - ки на Е.Х.
Далее проведем анализ переходных процессов
Для этого необходимо рассчитать приведенный момент инерции привода к валу двигателя.
7. Расчет переходных процессов скорости,
момента и тока
Найдем суммарный момент инерции электропривода, приведенный
к валу двигателя:
Jпр=Jдв*k +Jм/i2ст.р
k=1.05-1.3 - коэффициент, учитывающий момент инерции редуктора;
Jм- момент инерции производственного механизма, кг·м2
Jдв- момент инерции двигателя, кг·м2;
i2ст.р-стандартное передаточное отношение редуктора.
Момент инерции каждого механизма рассчитывается по формулам
|
(3.2) |
где
![]() -
частота вращения двигателя.
Подставляя
в формулу (3.2) известные значения масс
и линейные скорости находим моменты
инерции отдельных механизмов. Используя
известные линейные скорости элементов
механизмов крана находим их приведённые
моменты инерции к валу двигателя
механизма вылета стрелы при максимальном
вылете.
-
частота вращения двигателя.
Подставляя
в формулу (3.2) известные значения масс
и линейные скорости находим моменты
инерции отдельных механизмов. Используя
известные линейные скорости элементов
механизмов крана находим их приведённые
моменты инерции к валу двигателя
механизма вылета стрелы при максимальном
вылете.
Jм =Jгр + Jст + Jрей + Jпр
Jгр - Момент инерции груза
Jст - Момент инерции стрелы
Jрей - Момент инерции рейки
Jпр - Момент инерции противовеса
При грузоподъемности 16 т.
Jпр= 5,1531 кг*м2
При грузоподъемности 30 т.
Jпр= 7,0245 кг*м2. Увеличение за счет массы груза
Рассчитаем переходной процесс графоаналитическим способом.Сущность этого метода заключается в замене бесконечно малых приращений скорости dnи времени dtв уравнении движения электропривода малыми конечными приращениями – ∆n и ∆t.
При грузоподъемности 16 т.
Построим график динамического момента как M(n)-Mc1
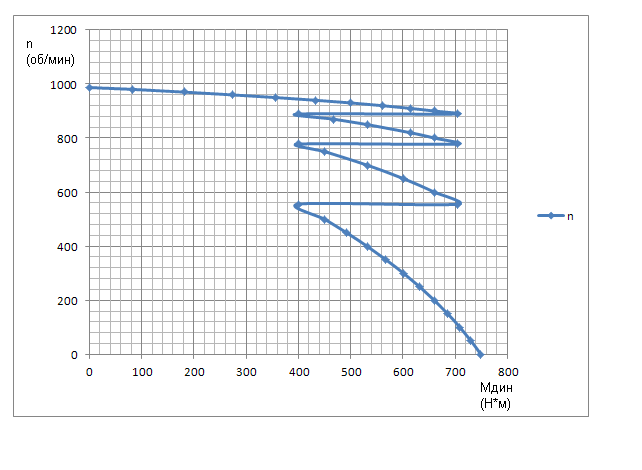
кривую динамического момента заменим ступенчатой с участками
определим время переходного процесса, которое требуется для
достижения скорости
ni = nначi+ ∆niна каждом участке
Полученные на отдельных участках элементарные промежутки времени суммируются для определения полного времени переходного процесса:
Таблица расчетных данных переходного процесса.
∆ ni |
Mдин i |
∆ ti |
t |
n |
M |
I |
0 |
|
|
0 |
0 |
883,467 |
202,801 |
100 |
725 |
0,101101 |
0,101101 |
100 |
843,416 |
188,846 |
100 |
690 |
0,10623 |
0,207331 |
200 |
794,378 |
173,853 |
80 |
630 |
0,093077 |
0,300408 |
280 |
745 |
160 |
80 |
580 |
0,101101 |
0,40151 |
360 |
698 |
148 |
80 |
520 |
0,112767 |
0,514276 |
440 |
626,38 |
133 |
80 |
460 |
0,127476 |
0,641752 |
520 |
560 |
118 |
40 |
410 |
0,071511 |
0,713263 |
560 |
533,802 |
112,258 |
0 |
600 |
0 |
0,713263 |
560 |
838,429 |
187,232 |
80 |
660 |
0,088847 |
0,802109 |
640 |
750 |
160 |
80 |
560 |
0,104712 |
0,906821 |
720 |
630 |
135 |
60 |
460 |
0,095607 |
1,002428 |
780 |
533,802 |
112,258 |
0 |
600 |
0 |
1,002428 |
780 |
838,429 |
187,232 |
20 |
680 |
0,021558 |
1,023986 |
800 |
794,378 |
173,853 |
40 |
620 |
0,047289 |
1,071275 |
840 |
690 |
146 |
20 |
530 |
0,02766 |
1,098935 |
860 |
630 |
137 |
30 |
460 |
0,047803 |
1,146739 |
890 |
533,802 |
112,258 |
0 |
600 |
0 |
1,146739 |
890 |
838,429 |
187,232 |
30 |
650 |
0,03383 |
1,180569 |
920 |
694,86 |
147,669 |
20 |
500 |
0,029319 |
1,209888 |
940 |
566,494 |
118,935 |
20 |
380 |
0,038578 |
1,248466 |
960 |
407,186 |
88,409 |
10 |
240 |
0,030541 |
1,279007 |
970 |
315,883 |
73,162 |
10 |
150 |
0,048866 |
1,327873 |
980 |
217,172 |
58,889 |
5 |
20 |
0,183246 |
1,511119 |
985 |
134 |
49 |
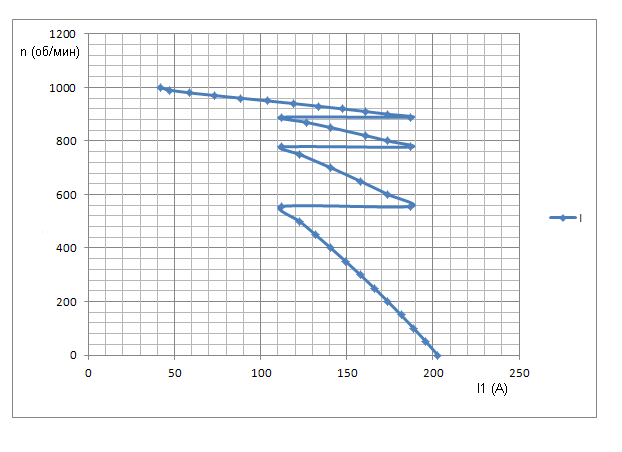
По графикам механической и эл. мех.характеристики определим значения токов и моментов, соответствующие конечной угловой скорости ni каждого участка.
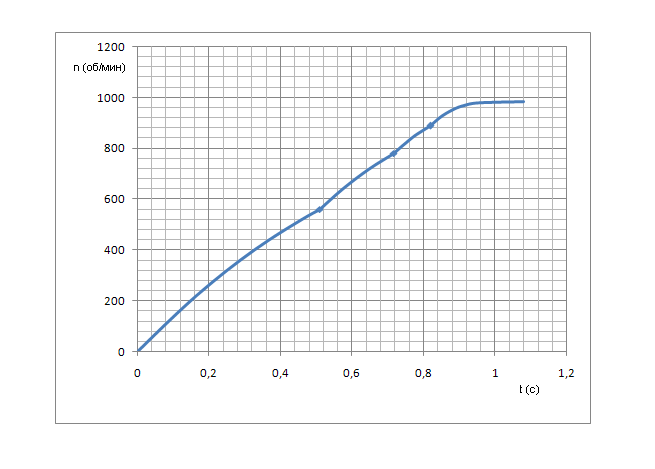
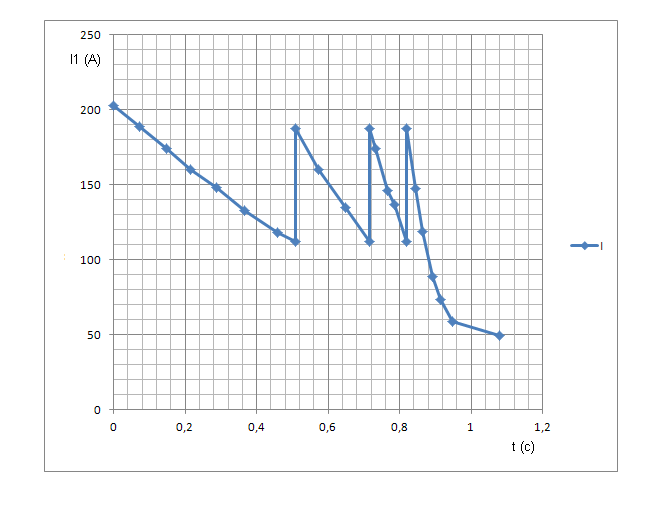
Графики переходных процессов скорости n=f(t), момента
M=f(t) и тока статора I1=f(t) построенные по точкам

При грузоподъемности 30 т.
Построим график динамического момента как M(n)-Mc1
По аналогичной методике рассчитаем переходной процесс
Таблица расчетных данных переходного процесса.
delta n |
Mdin |
delta t |
t |
n |
M |
I |
0 |
|
|
0 |
0 |
883,467 |
202,801 |
100 |
725 |
0,101101 |
0,101101 |
100 |
843,416 |
188,846 |
100 |
690 |
0,10623 |
0,207331 |
200 |
794,378 |
173,853 |
80 |
630 |
0,093077 |
0,300408 |
280 |
745 |
160 |
80 |
580 |
0,101101 |
0,40151 |
360 |
698 |
148 |
80 |
520 |
0,112767 |
0,514276 |
440 |
626,38 |
133 |
80 |
460 |
0,127476 |
0,641752 |
520 |
560 |
118 |
40 |
410 |
0,071511 |
0,713263 |
560 |
533,802 |
112,258 |
0 |
600 |
0 |
0,713263 |
560 |
838,429 |
187,232 |
80 |
660 |
0,088847 |
0,802109 |
640 |
750 |
160 |
80 |
560 |
0,104712 |
0,906821 |
720 |
630 |
135 |
60 |
460 |
0,095607 |
1,002428 |
780 |
533,802 |
112,258 |
0 |
600 |
0 |
1,002428 |
780 |
838,429 |
187,232 |
20 |
680 |
0,021558 |
1,023986 |
800 |
794,378 |
173,853 |
40 |
620 |
0,047289 |
1,071275 |
840 |
690 |
146 |
20 |
530 |
0,02766 |
1,098935 |
860 |
630 |
137 |
30 |
460 |
0,047803 |
1,146739 |
890 |
533,802 |
112,258 |
0 |
600 |
0 |
1,146739 |
890 |
838,429 |
187,232 |
30 |
650 |
0,03383 |
1,180569 |
920 |
694,86 |
147,669 |
20 |
500 |
0,029319 |
1,209888 |
940 |
566,494 |
118,935 |
20 |
380 |
0,038578 |
1,248466 |
960 |
407,186 |
88,409 |
10 |
240 |
0,030541 |
1,279007 |
970 |
315,883 |
73,162 |
10 |
150 |
0,048866 |
1,327873 |
980 |
217,172 |
58,889 |
5 |
20 |
0,183246 |
1,511119 |
983 |
164 |
52 |
По графикам механической и эл. мех.характеристики определим значения токов и моментов, соответствующие конечной угловой скорости ni каждого участка.
Графики переходных процессов скорости n=f(t), момента
M=f(t) и тока статора I1=f(t) построенные по точкам
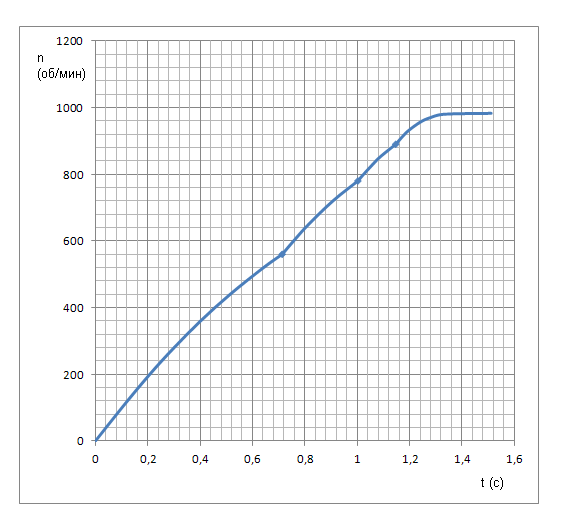

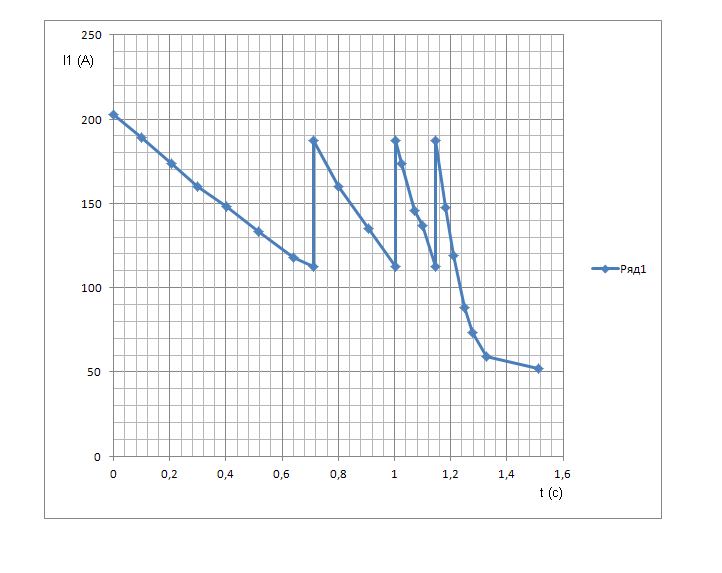
Исходя из графиков, можно сказать, что увеличение грузоподъемности не сказалось на существенное изменение переходных характеристик. Только произошло незначительное увеличение времени переходного процесса за счет изменения массы груза следовательно изменение момента инерции груза. Следовательно, реле времени шунтирующие пусковые сопротивления, при грузоподъемности в 30 т. нужно настроить на время срабатывания 0,71 с, 1 с, 1,15 с соответственно; общее время переходного процесса длится 1,51 с. А при грузоподъемности 16 т. настроить на время срабатывания на 0,51 с, 0,73 с, 0,81 с;общее время переходного процесса длится 1,1 с.
Так же переходной процесс можно построить в среде MatLab Simulink. Для этого необходимо создать математическую модель данного двигателя с основными параметрами.
Настраиваемыми параметрами являются:
Nom. power Pn – номинальная мощность,
Volt Vn – номинальное линейное напряжение,
Frequency fn – номинальная частота,
Stator (Rotor) R, L – активное сопротивление и индуктивность статора и приведённого ротора,
Mutual inductance Lm – взаимная индуктивность,
Inertia J – момент инерции на валу,
Friction factor F – коэффициент трения,
Pairs of poles – число пар полюсов р,
Initial conditions – начальные данные:
скольжение, угол поворота ротора, ток трёх фаз статора, сдвиг фаз А, В, С.
Изменяя сопротивление статора, получим переходные характеристики для каждой из ступеней
Индуктивность рассеяния фазы статора
 Гн
Гн
Индуктивность рассеяния фазы ротора
 Гн
Гн
Индуктивность взаимоиндукции
 Гн.(
Гн.(
Где Xm=Em/I0=4.841 Ом
![]() =202.3
В.
=202.3
В.
Так же зададимся параметрами питающей сети, момента нагрузки на валу двигателя и выберем нужные выходные переменные.
Графики переходных процессов представлены ниже: