17 Числоімпульсні датчики
Измерение перемещений с высокой точностью часто осуществляется числоимпульсными датчиками. Числоимпульсный датчик линейного перемещения состоит из стеклянной или металлической линейки со штрихами, рис. 3.25, а. Линейка соединяется с деталью, перемещение которой необходимо измерить. Длина линейки l определяет диапазон измеряемого перемещения. Расстояние между штрихами определяет ошибку измерения перемещения.

На станине, относительно которой перемещается деталь с линейкой, закреплены осветитель — это обычно светодиод СД, и фотоприемник ФП — это обычно фотодиод. Осветитель и фотоприемник
отъюстированы таким образом, что луч света падает на штриховую дорожку, а отраженный луч падает на светочувствительный слой фотоприемника. Во время движения линейки штрихи пересекают точку
падения светового луча, при этом луч рассеивается и не попадает на ФП, в результате на выходе ФП появляется импульс напряжения. Эти импульсы поступают на формирователь импульсов и далее на схему измерения перемещений, рис. 3.25, в. Импульсы от ФП поступают на две схемы совпадения И1 и И2. Выход схемы И1 подключен к суммирующему входу реверсивного счетчика СЧ, а выход схемы И2 — к вычитающему входу. Сигнал u1 принимает единичное значение и открывает схему И1 в том случае, когда линейка перемещается, удаляясь от нулевого положения шкалы. Сигнал u2, наоборот, принимает единичное значение и открывает схему И2 при обратном направлении движения линейки, когда она приближается к нулевому положению.
Основной недостаток числоимпульсного датчика заключается в том, что пропадание импульса под влиянием помех приводит к систематической ошибке, которая может быть устранена только при возврате датчика на нулевую отметку.
Числоимпульсный датчик может использоваться также для измерения линейной скорости согласно схеме на рис. 3.25, г. Сигналы от ФП поступают на схему И, которая открывается периодически на время Тт по сигналу таймера (датчика времени). За время Тт счетчик СЧ подсчитывает количество импульсов n, поступивших от ФП. После окончания импульса таймера вырабатывается сигнал «считывание», обеспечивающий перезапись выхода счетчика в запоминающий регистр Рг. Затем вырабатывается сигнал «сброс», переводящий СЧ в нулевое состояние. После этого начинается новый импульс таймера.
18 Кодові датчики
В числоимпульсных датчиках, как указывалось в предыдущем разделе, возникает неустранимая ошибка при случайном пропуске импульса фотоприемника. От этого недостатка свободны более сложные, но более надежные кодовые датчики.
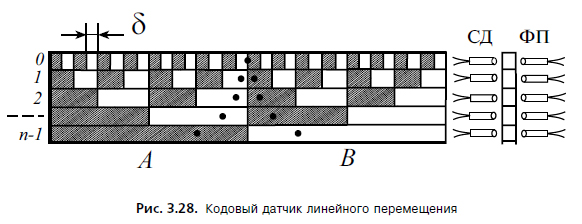
Принцип действия линейного кодового датчика состоит в следующем, рис. 3.28.
Стеклянная линейка разбита на n_дорожек с номерами 0,1,…, n-1. На нулевой дорожке с шагом нанесены чередующие прозрачные и непрозрачные участки. Шаг определяет ошибку измерения перемещения. На 1_й дорожке также нанесены прозрачные и непрозрачные участки, но их шаг в 2 раза больше, чем на нулевой дорожке. На каждой последующей дорожке шаг чередующихся прозрачных и непрозрачных участков в два раза больше, чем на предыдущей. Против каждой дорожки по разные стороны от стеклянной полосы установлена пара СД–ФП.
Когда между СД и ФП находится прозрачный участок, на выходе ФП появляется высокий потенциал, что соответствует значению 1 в данном разряде двоичного кода; в случае затемненного участка между СД и ФП низкий потенциал на выходе ФП соответствует значению 0 в данном разряде. Веса двоичных разрядов равны 2k где 0.1, … , n-1 — номер дорожки. В результате на выходе фотоприемников получается параллельный двоичный код перемещения линейки относительно считывающего неподвижного устройства, состоящего из СД и ФП.