

12. Кроковий двигун
У системах управління з мікро-ЕОМ іноді виникає необхідність повороту вала на фіксований кут або фіксованого переміщенні механізму без датчика зворотного зв'язку. Такі завдання найпростіше вирішуються за допомогою імпульсних або крокових двигунів (КД).
У поліграфічному обладнанні ШД використовуються не стільки в силових механізмах, скільки для автоматизації
допоміжних механізмів і процесів, що вимагають точного позиціонування.
Схема крокового двигуна повторює схему гістерезисного тільки з іншим позначенням ртора.
13. Датчики оцору
- використовуються для вимірювання механічних параметрів до яких відносять: деформація по якій можна визначити зусилля або крутний момент.
Принцип дії: сприймають відносні деформації елемента системи. Изменения длины проводника приводят к изменению его сопротивления.
Має просту конструкцію, недорогий.
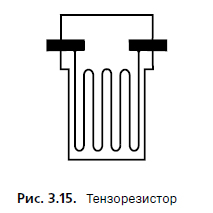
Датчик относительной деформации называется тензорезистором. Он состоит из бумажной основы (подложки), к которой приклеена высокоомная проволока с большим значением и малой площадью поперечного сечения S, как это показано на рис. 3.15.
Закон Гука дозволяє показати можливості даного датчика.
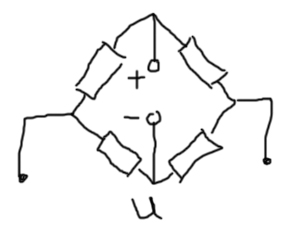
Включення тензорезисторів (включаються в плечі моста). При U=0 міст збалансований.
Напівпровідникові тензорезистори дорожчі, мають обмежену область застосування.
 -
лінійний потенціометр.
-
лінійний потенціометр.
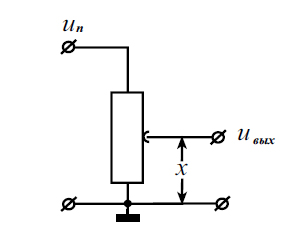
Линейный потенциометр — это стержень из изоляционного материала, на который равномерно намотана проволока из высокоомного материала, вдоль по потенциометру перемещается скользящий электрический контакт.
14. Ємнісні датчики
Емкость C плоского конденсатора, состоящего из двух пластин, разделенных диэлектриком,выполняется по формуле:
![]()
где — относительная диэлектрическая проницаемость изолирующего вещества между пластинами конденсатора, — диэлектрическая проницаемость вакуума, S — площадь сечения в перекрывающемся пространстве между пластинами, d — расстояние между пластинами.
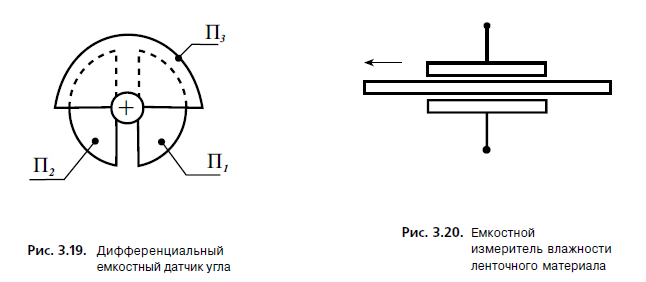
Емкостные датчики строятся на основе изменения какого-либо из параметров в выражении (3.16). В случае изменения расстояния между пластинами, получаем датчик перемещения, причем используются, как правило, дифференциальные датчики в силу известных преимуществ дифференциальных схем измерения.
Дифференциальный емкостный датчик угла поворота, рис. 3.19, состоит из двух неподвижных пластин
П1_и П2 и одной подвижной пластины П3. При повороте пластины П3 вокруг оси на угол αемкость одного конденсатора будет увеличиваться, а другого — уменьшаться; включив эти конденсаторы в плечи измерительного моста, получим датчик, выходное напряжение которого пропорционально углу α.
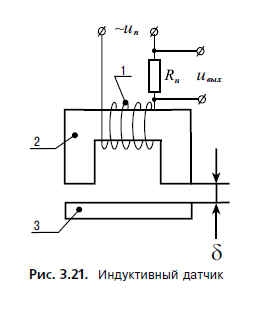
15. Індуктивні датчики
Индуктивные датчики предназначены для измерения угловых и линейных перемещений, которые преобразуются в изменение индуктивности. Индуктивные датчики, как и емкостные, не имеют механических подвижных контактов, поэтому, по сравнению с потенциометрическими, обладают большей надежностью. Чувствительность индуктивных датчиков выше, чем потенциометрических. Индуктивные датчики требуют более низкой частоты напряжения питания, чем емкостные.
16. рН- метр
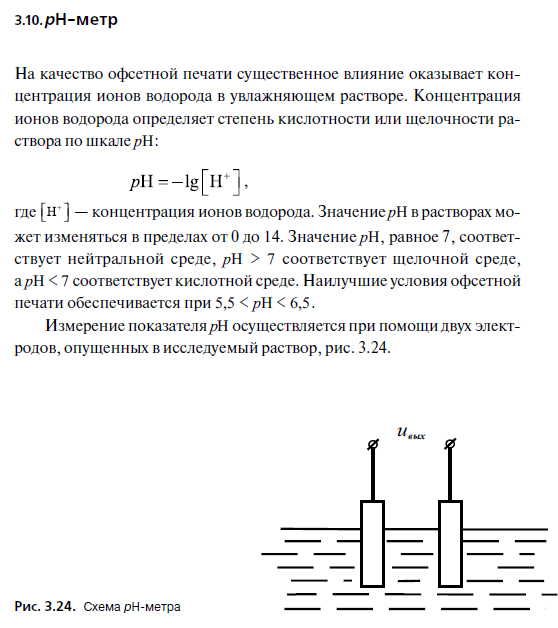
Один из этих электродов называется эталонным, его составляющие подбираются таким образом, чтобы потенциал электрода не зависел от концентрации ионов водорода, этот потенциал в рН-метре принимается за нулевой. Составляющие второго электрода подбираются таким образом, чтобы его потенциал изменялся пропорционально показателю рН, так называемый ион_селективный электрод.
Разность потенциалов электродов образует выходное напряжение Uвих. Необходимо отметить, что указанный рН-метр обладает большим выходным сопротивлением, поэтому подключать к нему можно только усилители с высоким входным сопротивлением.