

8. Основні положення механотроніки
Батьківщиною механотроніки прийнято вважати Японію. Основний принцип механотроніки полягає в проектуванні технологічної машини як єдиного цілого, підлеглого найкращому виконанню певної технологічного завдання. При цьому передбачається максимальна ступінь встроєння в технологічну машину електродвигунів, вимірювальних пристроїв, керуючих обчислювальних систем, аж до розробки спеціалізованих компонентів, органічно вписуються в єдину конструкцію.
Підкреслимо, що механотронний підхід до побудови технологічного устаткування припускає наявність розвиненої контрольно-вимірювальної (сенсорної) системи, вбудованої в технологічну машину. Сучасні поліграфічні машини налічують десятки і навіть сотні датчиків, які вимірюють різні параметри виконуваного технологічного процесу, самої машини, витратних матеріалів, середовища функціонування.
Необхідною умовою також є висока ступінь автоматизаціі обладнання, що мінімізує втручання обслуговуючого персоналу не тільки в робочі режими, а й у підготовчо-заключні (переналадочние) режими роботи технологічної машини. Використання принципів механотроніки дозволяє значно знизити кількість деталей в конструкції машини за рахунок ускладнення електронних та електромеханічних компонентів, що призводить до зменшення маси і габаритів машини.
Завдяки високому ступеню автоматизації механотронного обладнання, знижуються вимоги по кваліфікації операторів, зменшується кількість операторів на одиницю обладнання, однак підвищуються вимоги до інженерних і менеджерських кадрів.
Найважливішим принципом мехатроніки є максимальне зближення виконавчого двигуна (перетворювача енергії) з навантаженням, відмова від розподілу енергії через систему механічних передач і редукторів і від поняття «головного двигуна». У результаті технологічні машини стають багатодвигунними.
Найбільшою мірою принципам механотроніки задовольняє сучасне додрукарське обладнання, таке як сканери, фотовивідні пристрої, Плейтсетери, а також цифрові друкарські машини.
Багатодвигунний або розподілений електропривод починають широко впроваджуватися також в машинах офсетного і флексографічного друку. Такі провідні постачальники поліграфічного обладнання, як Man Roland, Heidelberg, КВА, Bobst, широко використовують багатодвигунні приводи. Кількість електродвигунів на одній машині доходить до сотні.
У сучасному післядрукарському обладнанні суттєвим чином використовуються комп'ютерне управління, розвинена контрольно-вимірювальна система, розподілений електропривод.
9. Асинхронний керівний електропривід
ринцип частотного регулювання швидкості асинхронного двигуна досить простий і заснований на тому, що синхронна швидкість ω0 машини визначається наступним співвідношенням:
Де f - Частота джерела живлення статора,
р -Число пар полюсів машини.
Змінюючи частоту струму в статорі, можна плавно регулювати швидкість обертання ротора в широких межах.
Основною вихідною величиною керованого електродвигуна є момент. При частотному управлінні електромагнітний момент залежить від частоти й напруги змінного струму, що надаться до статора машини, тому при зміні частоти необхідно змінювати і напругу живлення статора.
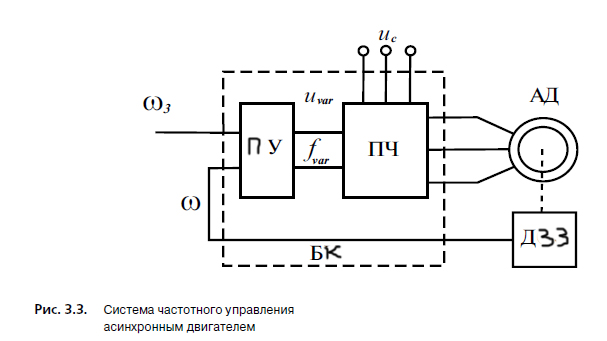
Де ПУ – пристрій управління, ПЧ – перетворювач частоти, БК – блок керування,
uс – напруга мережі, u – живлення статора АД, АД – асинхронний двигун, ДЗЗ – датчик зворотнього зв’язку, f – частота статора АД, wз - сигнал завдання, w - сигнал ДЗЗ.
Блок управления состоит из устройства управления УУ (ПУ) и преобразователя частоты ПЧ. Устройство управления на основании сигнала задания wз и сигнала wДОС(ДЗЗ) вырабатывает необходимые значения частоты f и напряжения u питания статора АД. Эти сигналы управляют преобразователем частоты, который питается от напряжения сети uc.