

Локальні системи керування
7. Принцип роботи цифрової локальної системи
Локальні системи знаходяться на нижніх рівнях системи управління виробництвом друкованої продукції. Ці системи в даний час, як правило, будуються з використанням цифрових обчислювальних машин. Функціональна схема цифрової локальної системи управління приведена на рис. 3.1.
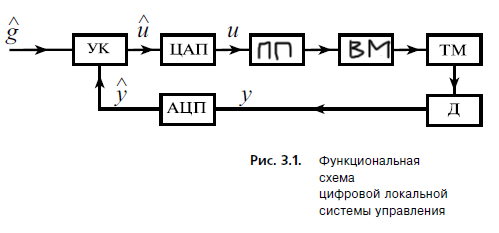
УК – управляючий комутатор, ЦАП – цифровий аналоговий перетворювач, ПП- підсилювач потужності, ВМ – виконавчий механізм, ТМ – таймер часу, Д – двигун, АЦП – автоматизований цифровий перетворювач, g – вхідний сигнал, y –сигнал зворотнього зв’язку, u – управляюча напруга, u’, y’ – двійковий код (що є вихідними даними для програми обчислення управляючого впливу).
Принцип действия системы заключается в следующем. С верхнего по отношению к данной системе уровня управления поступает задающее воздействие _ в виде параллельного двоичного кода. В том случае, когда, т. е. локальная система относится к классу систем стабилизации, это воздействие вводится в УК перед выполнением определенного режима и хранится в конкретной ячейке оперативной памяти в течение всего времени реализации этого режима. В случае изменяющегося во времени задания двоичный код __вводится в УК в каждом такте работы контроллера. Датчики, установленные на технологической машине, вырабатывают сигналы обратной связи так, что в общем случае — это вектор с несколькими строками по числу датчиков. Выходные сигналы датчиков, как правило, представляют собой изменяющиеся во времени напряжения. Эти сигналы поступают на входной коммутатор (мультиплексор) АЦП. Коммутатор, управляемый сигналами УК, последовательно подключает аналоговые сигналы к преобразователю аналог_цифра; получающийся параллельный двоичный код каждого сигнала датчика записывается в специально отведенную ячейку оперативной памяти УК. Вводимые в каждом такте в оперативную память двоичные коды _ и _являются иходными данными для программы вычисления управляющего воздействия, двоичный код которого фиксируется в определенной ячейке оперативной памяти. Отметим, что программа расчета хранится
в оперативной памяти с односторонним доступом с целью обеспечения высокой надежности хранения этой программы.
Параллельный двоичный код в каждом такте работы УК выводится на входной регистр ЦАП и хранится в этом регистре в течение всего такта до поступления нового кода . По этой причине выходное напряжение ЦАП остается постоянным в течение каждого такта работы УК. Напряжение управления на выходе ЦАП является кусочнопостоянной функцией времени.
Управляющее напряжение усиливается усилителем мощности и поступает на исполнительный механизм. В локальных системах управления может быть несколько ИМ, т. е. является вектором.
В этом случае для каждого ИМ используется отдельный УМ и отдельный ЦАП.
Исполнительные механизмы воздействуют на технологическую машину (ТМ) таким образом, чтобы выходная величина (вектор) изменялась бы в соответствии с предписанием _.