

Обзор программируемого логического контроллера Овен плк 100 к м.

Контроллер Овен ПЛК 100 К М предназначен для управления малыми и средними объектами, для создания систем диспетчеризации Построение системы управления и диспетчеризации на базе ОВЕН ПЛК возможно как с помощью проводных средств – используя встроенные . интерфейсы Ethernet, RS-232, RS-485, так и с помощью беспроводных средств – использую радио, GSM, ADSL модемы.
Вычислительные ресурсы: В контроллере изначально заложены мощные вычислительные ресурсы при отсутствии операционной системы: высокопроизводительный процессор RISC архитектуры ARM9, с частотой 180МГц компании Atmel; большой объем оперативной памяти – 8МБ; большой объем постоянной памяти – Flash память, 4МБ; объем энергонезависимой памяти, для хранения значений переменных – до 16КБ.
Программирование контроллера. Создание программ для контроллеров ОВЕН ПЛК100, и их конфигурирование осуществляется профессиональной системой CoDeSys v.2.3.6.1 и старше. Система программирования CoDeSys для покупателей контроллеров ОВЕН совершенно бесплатна, и записывается на диски, идущие в комплекте с контроллерами.
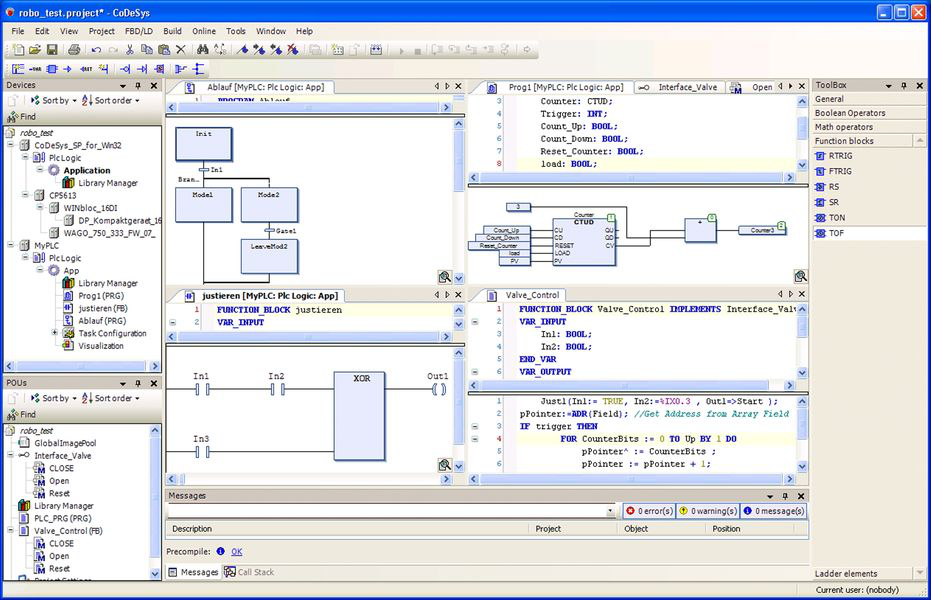
Описание интерфейса программы плк 100 к м.
Программирование контроллера ПЛК осуществляется при помощи программы CoDeSys, которая отпускается вместе с продуктом.
CoDeSys — инструментальный программный комплекс промышленной автоматизации. Производится и распространяется компанией 3S-Smart Software Solutions GmbH . Название CoDeSys является акронимом от Controller Development System. Версия 1.0 была выпущена в 1994 году. С ноября 2012 изменено написание на CODESYS. Основой комплекса CODESYS является среда разработки прикладных программ для программируемых логических контроллеров (ПЛК). Она распространяется бесплатно и может быть без ограничений установлена на нескольких рабочих местах.
В CODESYS для программирования доступны все пять определяемых стандартом IEC 61131-3 (МЭК 61131-3) языков:
IL (Instruction List) ассемблер-подобный язык
ST (Structured Text) Pascal-подобный язык
LD (Ladder Diagram) Язык релейных схем
FBD (Function Block Diagram) Язык функциональных блоков
SFC (Sequential Function Chart) Язык диаграмм состояний
В дополнение к FBD поддержан язык программирования CFC (Continuous Function Chart) с произвольным размещением блоков и расстановкой порядка их выполнения.
В CODESYS реализован ряд других расширений спецификации стандарта IEC 61131-3. Самым существенным из них является поддержка Объектно-ориентированного программирования (ООП).
Встроенные компиляторы CODESYS генерируют машинный код (двоичный код) , который загружается в контроллер. Поддержаны основные 16-и и 32-х разрядные процессоры: Infineon C166, TriCore, 80x86, ARM (архитектура), PowerPC, SH, MIPS (архитектура), Analog Devices Blackfin, TI C2000/28x и другие.
При подключении к контроллеру, среда программирования CODESYS переходит в режим отладки. В нем доступен мониторинг/изменение/фиксация значений переменных, точки останова, контроль потока выполнения, горячее обновление кода, графическая трассировка в реальном времени и другие отладочные инструменты.
CODESYS версии V3 построен на базе так называемой платформы автоматизации: CODESYS Automation Platform. Она позволяет изготовителям оборудования развивать комплекс путем подключения собственных плагинов.
Расширенная профессиональная версия среды разработки носит название CODESYS Professional Developer Edition. Она включает поддержу UML диаграмм классов и состояний, подключение системы контроля версий Subversion, статический анализатор и профилировщик кода. Распространяется по лицензии.
Инструмент CODESYS Application Composer позволяет перейти от программирования практических приложений к их быстрому составлению. Пользователь составляет собственную базу объектов, соответствующих определенным приборам , механическим узлам машины и т.п. Каждый объект включает программную реализацию и визуальное представление. Законченное приложение составляется из необходимых объектов, конфигурируется и автоматически генерируется программа на языках МЭК 61131-3.
Для программирования контроллера в среде CODESYS, в него должна быть встроена система исполнения (Control Runtime System). Она устанавливается в контроллер в процессе его изготовления. Существует специальный инструмент, позволяющий адаптировать ее к различным аппаратным и программным платформам.
Для подключения к контроллеру и написания программы необходима установка Target- файла для задания конфигурации программируемого контроллера. После выбора конфигурации нужно выбрать создание программы и язык программирования. Программирование ПЛК 100 К М на языке CFC.
2.1 Разработка алгоритма управления.
Исходя из того, что почти каждый человек живущий в нашей стране пользовался таким видом транспорта как лифт, подходя к нему всегда вызывал лифт нажатием кнопки после чего по прибытию лифта и открытия дверей шахты и кабины заходил, и путем нажатия кнопки выбирал необходимый ему этаж. Кабина движется по шахте в ту или иную сторону, при приближении к этажу во избежание резкой остановки кабины скорость должна замедлиться, после чего кабина останавливается на выбранном пользователем этаже. Открываются двери кабины и шахты, после чего пользователь выходит из кабины, проходит определенный промежуток времени и двери закрываются.
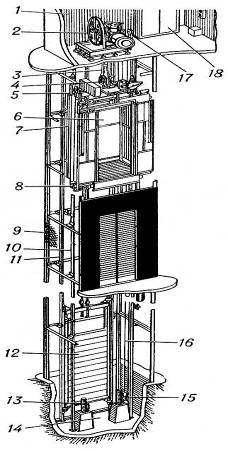 общий
вид шахты подъемного устройства.
общий
вид шахты подъемного устройства.
Общая структурная схема работы лифта
Составление алгоритма будем начинать с передвижения кабины снизу вверх.
При нажатии этажной кнопки замыкается контакт реле открытия дверей, после для того что, бы не перегрузить кабины кинематического устройства лифта должен быть замкнут/ разомкнут датчик загрузки кабины.
Положение кабины на этаже фиксируется концевыми выключателями. При нажатии кнопки второго этажа контакт реле открытия/ закрытия дверей размыкается после размыкания контакта нормально замкнутый контакт замыкает контакт контроллера который в свое время дает разрешение на передвижение кабины частотному преобразователю, после чего частотник постепенно при помощи ПИД- регулятора плавно набирает скорость, при подъезде к этажу кабина пересекает датчик передвижения кабины к нужному этажу, который замыкая контакт на контроллере замедляет ход кабины до полной остановке на этаже.
После чего замыкается концевик положения кабины на этаже двери кабины и шахты открываются, пользователь выходит из кабины, после чего через промежуток времени двери кабины закрываются.
По- аналогичной схеме осуществляется алгоритм передвижения на каждый этаж.
В каждой системе управления, должна быть предусмотрена система блокировок и аварий.
В данном случае в систему блокировок входит: датчик загрузки кабины, аварийный стоп во время перемещения кабины по шахте, при отключении питания лифта должен быть установлен источник бесперебойного питания контроллера и цепей управления, программой должным образом осуществляется оповещание оператора об отсутствии питания подъемно-транспортного устройства.
Так же после подачи основного питания устройства осуществить передвижение лифта до ближайшего этажа. Так же кабина и шахта лифта должны быть оснащены датчиками задымления помещения и оповещения оператора.
Б) По расчетно-технологической части.
2.2 Программирование контроллера ПЛК 100 К М.
Среда программирования CoDeSys, прежде чем написать программу необходимо сконфигурировать и подключить ПЛК. Подключаемся через USB порт, подключаем питание ПЛК. Установим драйвер устройства, после перейдем к процессу конфигурирования ПЛК.
Выбираем конфигурацию PLC – 100 K. M. обозначает язык программирования и собственно говоря и то, что необходимо написать саму программу. Язык программирования CFC, и переходим к написанию программы.
Что бы программа работала не только в режиме эмуляции, но и непосредственно с самим контроллером необходимо задать входы и выходы ПЛК.
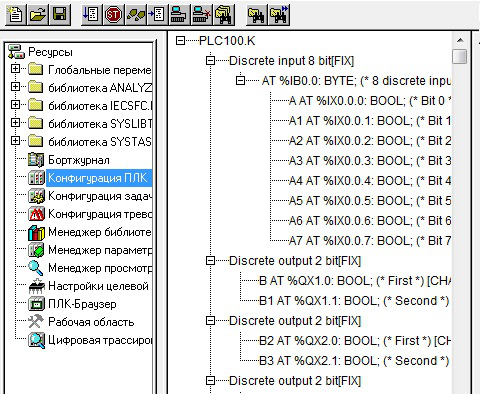
После того как мы обозначили все необходимые входа и выхода, приступаем к написанию программы.
Переносим на поле программирования элемент входа и обозначим его значением соответствующим первому выходу ПЛК (А), после переносим еще один вход и обозначаем его в соответствии с четвертым выходом(А3).
Создаем элементы: ИЛИ, И, НЕ. Соединяем вход А с элементами И, ИЛИ.
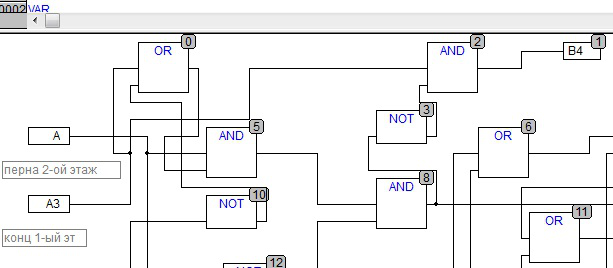
Выход элемента НЕ соединяем со вторым входом элемента ИЛИ. Создаем на поле программирования еще один элемент И, соединяем с ним вход А и выход элемента ИЛИ. Выход этого элемента соединяется еще с последующим входами элементов: И, ИЛИ.
Существуют блокирующие элементы НЕ, они используются во избежание срабатывании двух и более входов. На всех этих базовых элементах мы построили программу позволяющую передвигать кабину подъемно- транспортного устройства с людьми, с первого этажа здания на второй.
По этой же технологии делаем подъем со второго этажа до третьего. И наоборот. Программа будет действовать только на данном макете лифта с попутным сбором пассажиров.
Построим программу лифта с алгоритмом работы третий этаж – второй этаж.
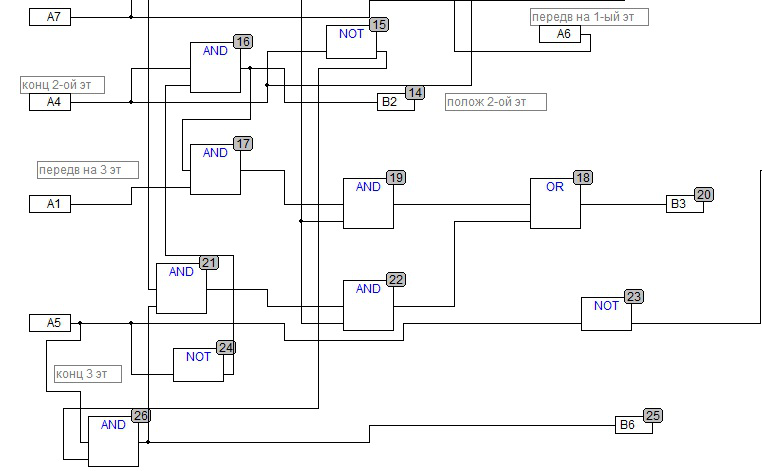
Что бы сработал транзисторный выход (В) необходимо завязать между собой два входа: положение кабины 3-ий этаж (А5) и передвижение на второй (А). Объединим их элементами И, ИЛИ,НЕ.
Общий вид программы выглядит как свод функциональных блоков простейшей элементной базы передающих друг другу сигналы так, что бы программа имела выражение.
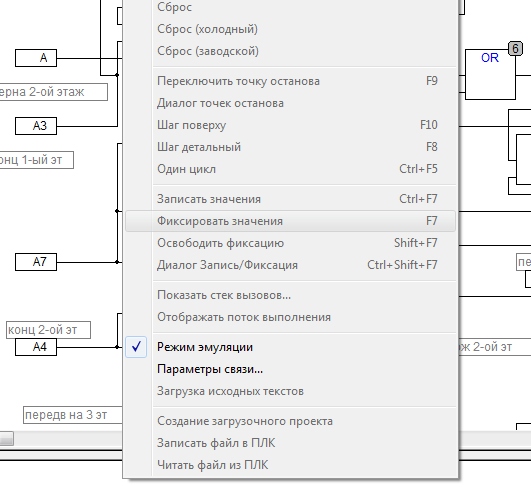
Проверяем написанную программу в режиме эмуляции:
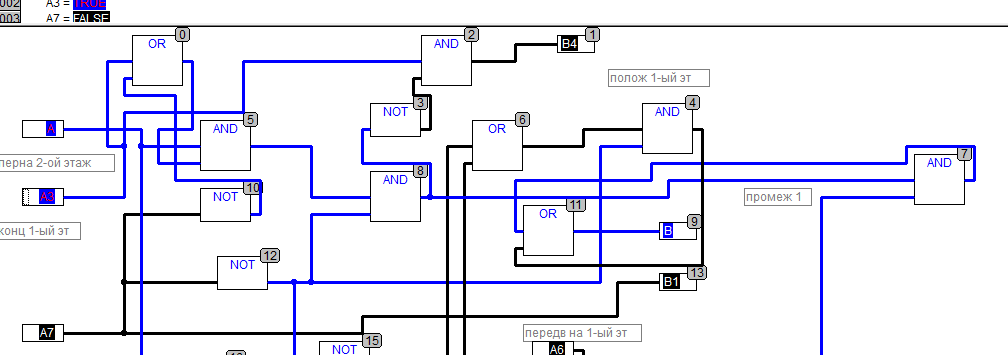
Открываем вкладку консоли задач «Онлайн» ставим галочку «режим эмуляции», нажимаем клавишу подключиться. Поле среды программирования изменило цвет линий. После чего для проверки работоспособности программы, необходимо обозначить значение входного сигнала А и А3 двойным нажатием на них мыши до появление надписи TRUE, что означает истинна или в нашем случае сигнал. Заходим «Онлайн» выбираем «фиксировать значение» и нажимаем старт программы, после чего загорается выход ПЛК (В), что свидетельствует о том, что программа работает.
Программа теперь имеет такой вид:
Перейдем к описанию всех входов и выходов.
Входные сигналы ПЛК:
1- А кнопка передвижения на второй этаж,
2-А1 кнопка передвижения на третий этаж,
3-А2 кнопка передвижения на первый этаж,
4-А3 концевой выключатель первого этажа,
5-А4 концевой выключатель второго этажа,
6-А5 концевой выключатель третьего этажа,
7-А6 свободный контакт,
8- А7 датчик индуктивности на замедление хода кабины.
Выходные сигналы ПЛК:
1- В движение кабины вверх с первого этажа на второй,
1.1- В1 сигнал на замедление кабины,
2- В2 положение кабины, второй этаж,
2.1- В3 движение кабины вверх со второго этажа на третий,
3-В4 положение кабины первый этаж,
3.1- В5 положение кабины третий этаж,
4- В6 движение вниз с третьего этажа на второй,
4.1 – В7 движение кабины вниз со второго этажа на первый.
В) По экономической части.