

2.2. Электрический исполнительный механизм
В качестве альтернативы шагового двигателя, изображенного на принципиальной схеме также используются исполнительные двигатели с независимым возбуждением, которые имеют две обмотки: обмотку возбуждения, подключаемую к сети с постоянным напряжением Uв=const, и обмотку управления, на которую подаётся напряжение управления Uу= var. Для исполнительных двигателей применяют якорное или полюсное управление. При якорном управлении напряжение управления подаётся к обмотке якоря (Я), которая является обмоткой управления, а напряжение возбуждения – к обмотке полюсов, которая является обмоткой возбуждения. При полюсном управлении напряжение управления подаётся на обмотку полюсов, которая является обмоткой управления, а напряжение возбуждения через добавочный резистор на обмотку якоря, которая является обмоткой возбуждения.
Исполнительным двигателям постоянного тока присущи следующие достоинства:
– широкий диапазон регулирования частоты вращения;
– линейность механических и регулировочных характеристик;
– отсутствие самохода;
– значительный пусковой момент;
– малые масса и габариты.
Рассмотрим электрический исполнительный механизм с двигателем постоянного тока, рис. 2.2.1. Управление двигателем осуществляется от тиристорного усилителя мощности, содержащего два встречно включенных тиристорно-диодных моста и схемы импульсно-фазового управления. Для снижения частоты вращения вала ИМ и увеличения рабочего момента используется понижающий редуктор и червячная передача. ЧП преобразует вращательное движение ротора ДПТ и Р в поступательное перемещение регулирующего органа.
Запишем передаточную функцию ИМ:
 ,
,
 ,
,
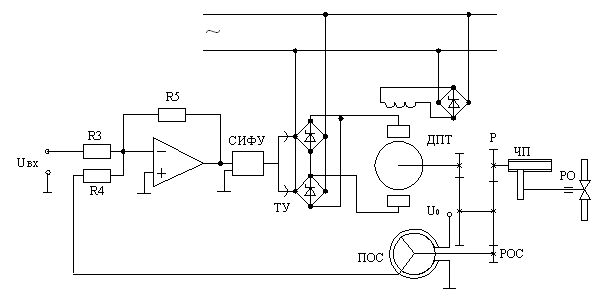
Рис. 2.2.1 Принципиальная схема исполнительного электрического механизма с двигателем постоянного тока
 – звено первого
порядка.
– звено первого
порядка.
Расчет данных:
ДПТ: Вт;
Вт;
 В;
В;
 об/мин
об/мин об/с;
об/с;
 рад/с;
рад/с;
 А;
А;
 нм;
нм;
 н
м/А;
н
м/А;
 рад/сВ;
рад/сВ;
 об/сВ.
об/сВ.
ТУ:
В;
 В;
В;
Р:
 об/с;
об/с;
 об/с;
об/с;
 .
.
ЧП:
 об;
об;
 о.е.;
о.е.;
 о.е./об.
о.е./об.
РОС:
об;
 об;
об;
 .
.
ПОС:
 В;
об;
В;
об;
 В/об.
В/об.
ОУ:
 ;
;

Получаем:
 ;
;
 с.
с.
Подставим рассчитанные параметры в уравнение:

Таким образом двигатель постоянного тока с потенциометром обратной связи можно также описать как апериодическое звено первого порядка.
2.3. Алгоритм пи-регулятора
Современные системы автоматизации производства комплектуются на базе программируемых логических контроллеров (PLC). Их преимущество – возможность свободного программирования алгоритмов технологических задач на универсальных алгоритмических языках STL, LDR, а также С/C++. PLC позволяют осуществлять управление большим числом локальных контуров.
Наряду с PLC применяются интегрированные программируемые контроллеры (IPC). IPC базируются на технологии процессоров для ПК и работают под управлением операционной системы. Их отличие от PLC заключается в возможности производить не только логические операции, но и вычисления с плавающей точкой, работать со строковыми данными. Они применяются для управления электрическими, пневматическими исполнительными механизмами. Возможность свободного программирования контроллера позволяет реализовать на его базе алгоритм ПИ-регулятора.
Идеализированное уравнение ПИД-регулятора имеет вид,

где u(t) – выходная величина; e(t) – ошибка,
e(t)=u0(t)-y(t); u0(t) – опорное значение;
Kp – коэффициент передачи (коэффициент пропорциональной составляющей);
Для малых тактов
квантования
 уравнение можно преобразовать в
разностное при замене производной
разностью первого порядка, а интеграла
– суммой. Непрерывное интегрирование
может быть заменено интегрированием
по методу прямоугольников или трапеций.
Если для аппроксимации интеграла
использовать метод трапеций, то на
основании уравнения получим:
уравнение можно преобразовать в
разностное при замене производной
разностью первого порядка, а интеграла
– суммой. Непрерывное интегрирование
может быть заменено интегрированием
по методу прямоугольников или трапеций.
Если для аппроксимации интеграла
использовать метод трапеций, то на
основании уравнения получим:



где

Отношение
 – коэффициент дифференциальной, а
– коэффициент дифференциальной, а
 – коэффициент интегральной составляющей
дискретного ПИД-регулятора. Для малых
тактов квантования параметры
– коэффициент интегральной составляющей
дискретного ПИД-регулятора. Для малых
тактов квантования параметры
 можно
вычислить, используя параметры
можно
вычислить, используя параметры аналогового ПИД-регулятора в соответствии
с приведенными соотношениями.
аналогового ПИД-регулятора в соответствии
с приведенными соотношениями.
Из этого уравнения можно получить уравнения для реализации П и ПИ законов регулирования.