

9.4 Ваговий стабілізуючий момент
9.4.1 Ваговий стабілізуючий момент при поперечному нахилі шворня.
Поворот керованих коліс автомобілів здійснюється навколо вісей, які називають осями шворнів. У загальному випадку ці вісі мають нахил у двох взаємно перпендикулярних площинах – поперечній (бічний нахил) і поздовжній. Такий нахил називають комбінованим нахилом шворня. Через нахили шворнів, конструктивні параметри керованого моста і коліс виникає момент, викликаний вагою, що припадає на кероване колесо. Оскільки він залежить від ваги, то його називають ваговим. Величину і напрямок цього моменту необхідно знати під час проектування механізмів кермових керувань автомобілів, оскільки він є складовою частиною моменту опору повороту коліс як на місці, так і під час руху, а також при дослідженні коливань керованих коліс, оскільки під час коливання колеса повертаються навколо вісей шворнів.
Для визначення вагового стабілізуючого моменту були прийняті наступні допущення:
- змінами кутів нахилів шворня і навантаження на кероване колесо, зумовленими перекосом керованого моста під час повороту коліс нехтуємо і вважаємо їх сталими;
- рівнодіюча нормальних реакцій опорної поверхні Rz прикладена в точці перетину площини симетрії ободу з малою віссю контактного відбитка і не залежить від поточного кута розвалу;
- ваговий стабілізуючий момент вважаємо додатним, якщо при фіксованому положенні керованого колеса він напрямлений так, що повертає його в положення прямолінійного руху. Інакше вважаємо момент від'ємним. Прийняте допущення у формулах дозволяє в подальшому врахувати напрямок дії вагового стабілізуючого моменту.
Спочатку розглянемо визначення вагового стабілізуючого моменту тільки від поперечного нахилу шворня. У загальному випадку для отримання аналітичних залежностей для його визначення існують три способи: класичної механіки (добуток сили на плече), аналітичної геометрії (векторний добуток двох векторів) і закон збереження енергії. Як приклад, розглянемо визначення вагового моменту відповідно до способу класичної механіки.
Згідно класичної механіки ваговий стабілізуючий момент Мст запишемо як добуток сили на плече її дії відносно осі шворня:
Мст = F l , (9.9)
де F – сила, перпендикулярна до вісі шворня;
l – плече дії сили F.
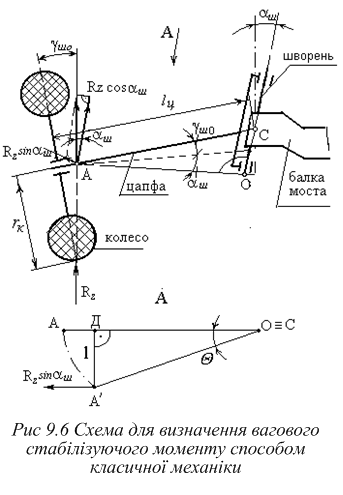
Схема для визначення вагового стабілізуючого моменту способом класичної механіки наведена на рис.9.6. Згідно із рис.9.6 прийняті наступні позначення: rк – радіус колеса; lц – довжина цапфи; ш – кут поперечного нахилу шворня; ш0 – кут розвалу колеса в положенні прямолінійного руху; Rz – рівнодіюча нормальних реакцій опорної поверхні, викликана вагою, що припадає на колесо.
 Аналіз
конструкцій керованих мостів автомобілів
засвідчив, що між керованим колесом і
віссю шворня існує проміжна ланка –
цапфа (див. рис.9.6). Цапфа є важелем
відносно осі шворня, і на цьому важелі
рівнодіюча нормальних реакцій опорної
поверхні створює ваговий стабілізуючий
момент. Тому рівнодіючу перенесемо по
лінії її дії до перетину з віссю цапфи
в точку А.
Аналіз
конструкцій керованих мостів автомобілів
засвідчив, що між керованим колесом і
віссю шворня існує проміжна ланка –
цапфа (див. рис.9.6). Цапфа є важелем
відносно осі шворня, і на цьому важелі
рівнодіюча нормальних реакцій опорної
поверхні створює ваговий стабілізуючий
момент. Тому рівнодіючу перенесемо по
лінії її дії до перетину з віссю цапфи
в точку А.
Оскільки момент створюється складовою, перпендикулярною до вісі шкворня, то розкладемо рівнодіючу на дві складові: Rzsinш – перпендикулярну до вісі шворня і Rzcosш – паралельну вісі шворня. Отже, силою F у рівнянні (9.9) буде складова Rzsinш, прикладена в точці А, оскільки вона перпендикулярна вісі шворня.
Задача зводиться до знаходження плеча l дії сили Rzsinш відносно осі шворня.
З аналізу рис. 9.6 випливає, що під час повороту керованого колеса навколо вісі шворня точка А рухатиметься по дузі кола з центром у точці О і радіусом ОА.
Під час повороту цапфи колеса на кут точка А займе положення А', а плече l у цьому випадку визначиться відстанню l=А'Д.
З аналізу
![]() ОА/Д
маємо: А'Д = l = А'Оsin=АОsin
ОА/Д
маємо: А'Д = l = А'Оsin=АОsin![]() ,
,
де – кут повороту цапфи.
З
ОАС
запишемо: ОА=АС cos![]() САО==АСсоs
САО==АСсоs![]() .
.
З
аналізу рис.9.6 випливає, що AC =![]() ,
,
де
![]() – поточний
кут розвалу, тобто кут розвалу колеса
при куті повороту цапфи
.
– поточний
кут розвалу, тобто кут розвалу колеса
при куті повороту цапфи
.
Тоді: l = (lц - rкtgш) cos (ш+ш0) sin . (9.10)
Після підставлення (9.10) до виразу (9.9), а замість сили F її значення Rzsinш отримаємо остаточно значення вагового стабілізуючого моменту від поперечного нахилу шворня при куті поворота цапфи:
 Мст(
)
= Rzsin
ш(lц
– rкtg
ш)
cos (ш+ш0)
sin .
(9.11)
Мст(
)
= Rzsin
ш(lц
– rкtg
ш)
cos (ш+ш0)
sin .
(9.11)
Невідомою величиною у формулі
(9.11) є поточний кут розвалу
![]() .
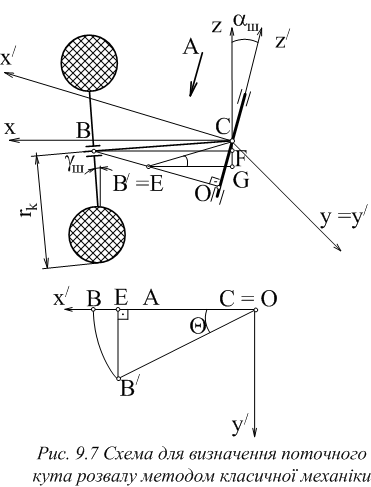
Розрахункова схема для визначення
поточного кута розвалу лівого керованого
колеса наведена на рис.9.7. З аналізу
рис.9.7 випливає, що під час повороту
колеса навколо вісі шворня
його центр (точка В) буде переміщатися
по дузі кола з центром у точці О і радіусом
ОВ. Якщо цапфа обернеться на кут ,
тоді точка В опуститься на величину FG
і займе положення В'=Е.
При такому куті повороту поточний кут
розвалу ш = CВ'G.
.
Розрахункова схема для визначення
поточного кута розвалу лівого керованого
колеса наведена на рис.9.7. З аналізу
рис.9.7 випливає, що під час повороту
колеса навколо вісі шворня
його центр (точка В) буде переміщатися
по дузі кола з центром у точці О і радіусом
ОВ. Якщо цапфа обернеться на кут ,
тоді точка В опуститься на величину FG
і займе положення В'=Е.
При такому куті повороту поточний кут
розвалу ш = CВ'G.
З аналізу СВ/G маємо:
sin ш = CG/CB' = CG/lц.
З аналізу рис.9.7 запишемо:
CG = CF + FG,
де CF = lц • sin ш0 ; FG = ВЕ • sin ш.
З рис.9.7 випликає, що:
BE = BO-EO = lц •cos (ш+ш0)•(1-cos ).
Підставивши отримані значення до рівняння синуса поточного кута розвалу, після елементарних перетворень отримаємо:
sin ш = sin ш0 + cos (ш+ш0)•(1-cos ) •sin ш . (9.12)
Таким чином, використовуючи залежності класичної механіки, отримано залежності (9.11) і (9.12) для визначення вагового стабілізуючого моменту і поточного кута розвалу.
Якщо врахувати, що при
малих кутах
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
тоді вираз (9.12) набуде вигляду:
,
тоді вираз (9.12) набуде вигляду:
ш(![]() )=ш0+ш
(1-cos )
.
(9.13)
)=ш0+ш
(1-cos )
.
(9.13)
Таким чином, ваговий стабілізуючий момент від поперечного нахилу шворня направлений у сторону, що повертає кероване колесо до положення прямолінійного руху автомобіля, а тому буде додатним і його величину будемо визначати за формулами (9.11). (9.13).