

Обзорно-сравнительный способ ориентировки по брлс и определение с её помощью путевой скорости и угла сноса.
Благодаря тому, что на экране БРЛС формируется изображение пролетаемой местности, пилот может вести ориентировку путем сопоставления радиолокационного изображения с полетной картой, наподобие того, как это делается при визуальной ориентировке. Такой способ, называемый обзорно-сравнительным, является относительно простым и наглядным, не требует измерений и расчетов, но зато и не обладает высокой точностью. Рассмотрим особенности такой ориентировки.
Изображение на экране классической ЭЛТ является одноцветным, следовательно, видимые объекты различаются только яркостью. Яркость же пропорциональна мощности отраженного сигнала и, значит, степени отражающей способности объекта.
Яркость предметов, которые мы видим глазами, зависит от их способности отражать свет, то есть электромагнитное излучение в видимом диапазоне. Но в дециметровом диапазоне радиоволн, в котором работает БРЛС, отражающая способность объектов совсем другая. То, что глазами мы видим ярким, на экране локатора может выглядеть невзрачным. А яркая засветка на экране может оказаться просто одним из корпусов завода или небольшой железнодорожной станцией, где много металлических предметов, хорошо отражающих сигнал.
Зависит яркость и от удаления объекта, и от направления облучения, от того, под каким углом падает радиоволна на поверхность объекта – чем более перпендикулярно, тем ярче. Поэтому склоны гор, обращенные в сторону ВС, выглядят ярче равнинной местности.
Если же радиоволна отражается не в сторону ВС, а как от зеркала в противоположную сторону, то отраженный сигнал антенна не примет, экран в данном месте светиться не будет и такой объект (например, водная поверхность озера) будет выглядеть на экране как темное пятно. Но на фоне слабосветящейся суши такое пятно будет хорошо видно, поэтому водные объекты (озера, моря, точнее, их береговая черта, крупные реки) являются хорошими ориентирами.
Максимальная дальность обнаружения объектов зависит от длины волны, мощности передатчика и чувствительности приемника, состояния атмосферы, высоты полета и отражающих свойств объектов. Поэтому значения дальностей можно лишь ориентировочные (табл. 9.2).
Равнинная местность выглядит как равномерно и слабо светящаяся область. На ее фоне хорошо видны водные объекты в виде темных пятен. В свою очередь на фоне водной поверхности могут быть видны крупные морские и речные суда.
Таблица 9.2 Примерные максимальные дальности обнаружения объектов на экране БРЛС
-
Вид ориентира
Дальность
обнаружения, км
Крупные промышленные центры
250-350
Средние города
150-200
Береговая черта (вид со стороны моря)
100-200
Крупные реки
100-150
Средние озера
80-100
Грозовая облачность
150-200
Населенные пункты выглядят как светлые пятна, причем их конфигурация в общем случае не совпадает с их конфигурацией на карте. Неплохо видны железнодорожные мосты и плотины в виде ярких светящихся точек.
У крупных рек может быть видна их водная поверхность. Но часто можно заметить и средние реки благодаря наличию склонов у их берегов. Ведь поверхность, наклоненная в сторону радиолокатора будет давать более сильный отражающий сигнал и изгибы реки будут заметны в виде более яркой линии на фоне равномерной засветки.
Горная и пересеченная местность будет видна в виде пёстрых светлых и темных пятен. Темные пятна образуются из-за затенения объектов. Ведь локатор «видит» местность не так, как человеческий глаз. Если пилот будет смотреть на местность с ВС как это показано на рис. 9.8, то ближняя к нему гора будет видна на фоне дальней и точка А будет видна непосредственно рядом с точкой В. Но на экране БРЛС расположение точек зависит от удаления до них. На соответствующем удалении от центра экрана будет видна точка А, и на значительно большем удалении точка В. А между ними экран будет темным, ведь никакой отраженный сигнал не пришел с удалений от А до В. Такие темные пятна можно спутать с озерами. Отличить же от озер такие затененные области можно благодаря изменению их формы при движении самолета.
Наблюдаемые на экране объекты, можно разделить на радиолокационные точки (РЛТ), и радиолокационные ориентиры (РЛО)
РЛТ – это любой малоразмерный объект, наблюдаемый на экране. Пилот может и не знать, что это за объект, его может не быть на карте.
РЛО – это опознанные объекты, с известным расположением на земной поверхности.
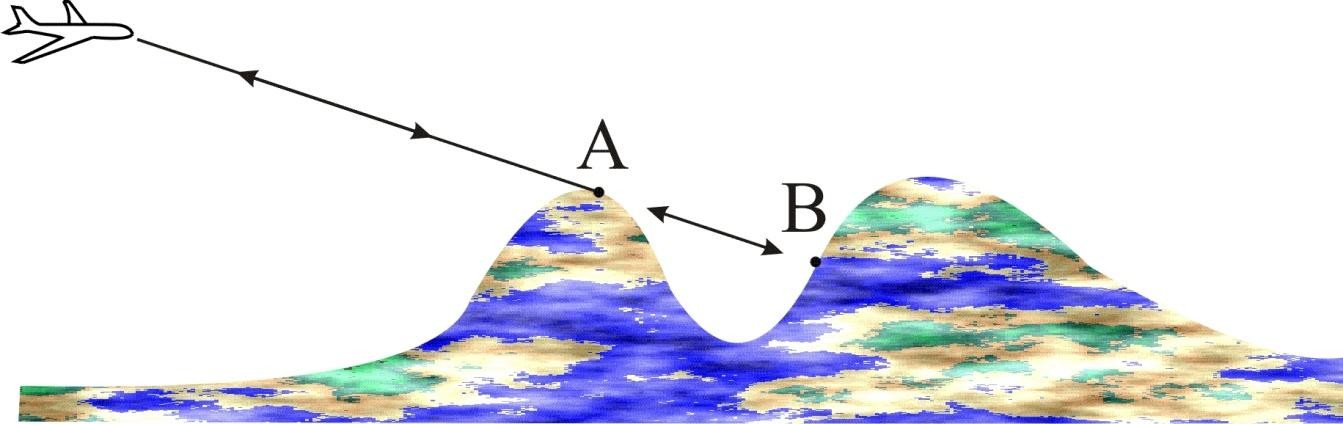
Рис. 9.8. Затенение объектов
Обычно под РЛО понимают не весь какой-то большой площадной объект, а малоразмерный точечный объект, который, возможно, является частью этого объекта: мост, мыс на береговой черте, характерный изгиб реки, небольшой остров в море. С помощью РЛО можно вести ориентировку и определить место самолета. Правила радиолокационный ориентировки в целом совпадают с правилами визуальной ориентировки, описанными в главе 1.
РЛТ для ориентировки использовать нельзя, поскольку неизвестно их расположение на земной поверхности. Но их можно использовать для других целей, например, для определения путевой скорости.
Определение путевой скорости и угла сноса по БРЛС
Определение путевой скорости. Все ориентиры на экране по мере движения ВС перемещаются в сторону, противоположную направлению движения ВС, то есть, на экране примерно вниз. Именно примерно, поскольку ВС летит не в направлении продольной оси (курсовой черты на экране), а в направлении вектора путевой скорости, с учетом УС.
Необходимо выбрать РЛО (или РЛТ) обязательно вблизи курсовой черты и в момент пересечения им какой-либо метки дальности включить секундомер. В момент пересечения им другой метки дальности секундомер останавливается. Расстояние между выбранными метками дальности должно быть не менее 40 км, иначе точность будет очень низкой (см. п. 1.4).
Очевидно, что расстояние, пройденное ВС за измеренное время, равно расстоянию, на которое сместился ориентир. Его определить нетрудно, поскольку интервал между метками дальности на каждом масштабе известен. Следовательно, разделив расстояние на время, можно легко определить путевую скорость. Расчет обычно выполняется на НЛ-10.
Теоретически «засекать» время можно при любой дальности ориентира, даже когда он находится между метками дальности. Но точность определения дальности и, следовательно, путевой скорости, будет гораздо ниже.
Если ориентир выбрать не вблизи курсовой черты, то при смещении на экране «вниз» он будет пересекать метки дальности не под прямым углом и пройдет расстояние, не равное интервалу между метками.
Определение угла сноса в режиме «Снос». В режиме «Снос» бортового радиолокатора сканирование антенны прекращается. Она останавливается в случайном положении и импульсы излучаются только в одном направлении. Изображение местности исчезает, экран становится темным и на нем видна только яркая линия развертки (рис. 9.12). Точки на этой линии мерцают из-за доплеровских биений частоты. Для наглядности это можно объяснить себе следующим образом (хотя это объяснение и не очень корректно). При движении ВС расположенные на земле РЛТ перемещаются в направлении, обратном направлению вектора путевой скорости, то есть, скорее всего, под каким-то углом к линии развертки, которая сама направлена случайным образом. Здесь под РЛТ понимаются вообще все точки на земной поверхности. Какие-то из них ярче, какие-то слабее. Эти РЛТ хаотично пересекают линию развертки, что и создает мерцания.
Клавишами управления антенной, которые расположены слева от экрана, линию развертки (направление антенны) можно направить в любую сторону. Задача пилота – подобрать такое положение антенны, чтобы мерцания на линии развертки стали как можно медленнее, желательно, чтобы почти остановились. Это положение антенны будет соответствовать направлению вектора путевой скорости. Ведь тогда ориентиры будут не пересекать линию, создавая мерцания, а довольно медленно двигаться вдоль нее.
Угол сноса – это угол между вектором истинной скорости, который направлен по курсовой черте, и вектором путевой скорости, который направлен по подобранному положению развертки. Его можно просто отсчитать по шкале курсовых углов на краю экрана.
Точность такого способа определения УС невелика, СКП составляет 2- 3°. Но на тех ВС, на которых не установлен ДИСС, но установлена БРЛС, это основной способ определения УС.
Способ половинной дальности. Существует способ, называемый базисным способом, с помощью которого можно определить одновременно W и УС по КУО и D любого ориентира, измеренным в два разных момента времени. Формулы расчета этим способом несколько громоздки для расчета на НЛ-10, поэтому в данном учебном пособии не приводятся. Но частный случай этого способа, называемый способом половинной дальности, может быть легко реализован на практике.
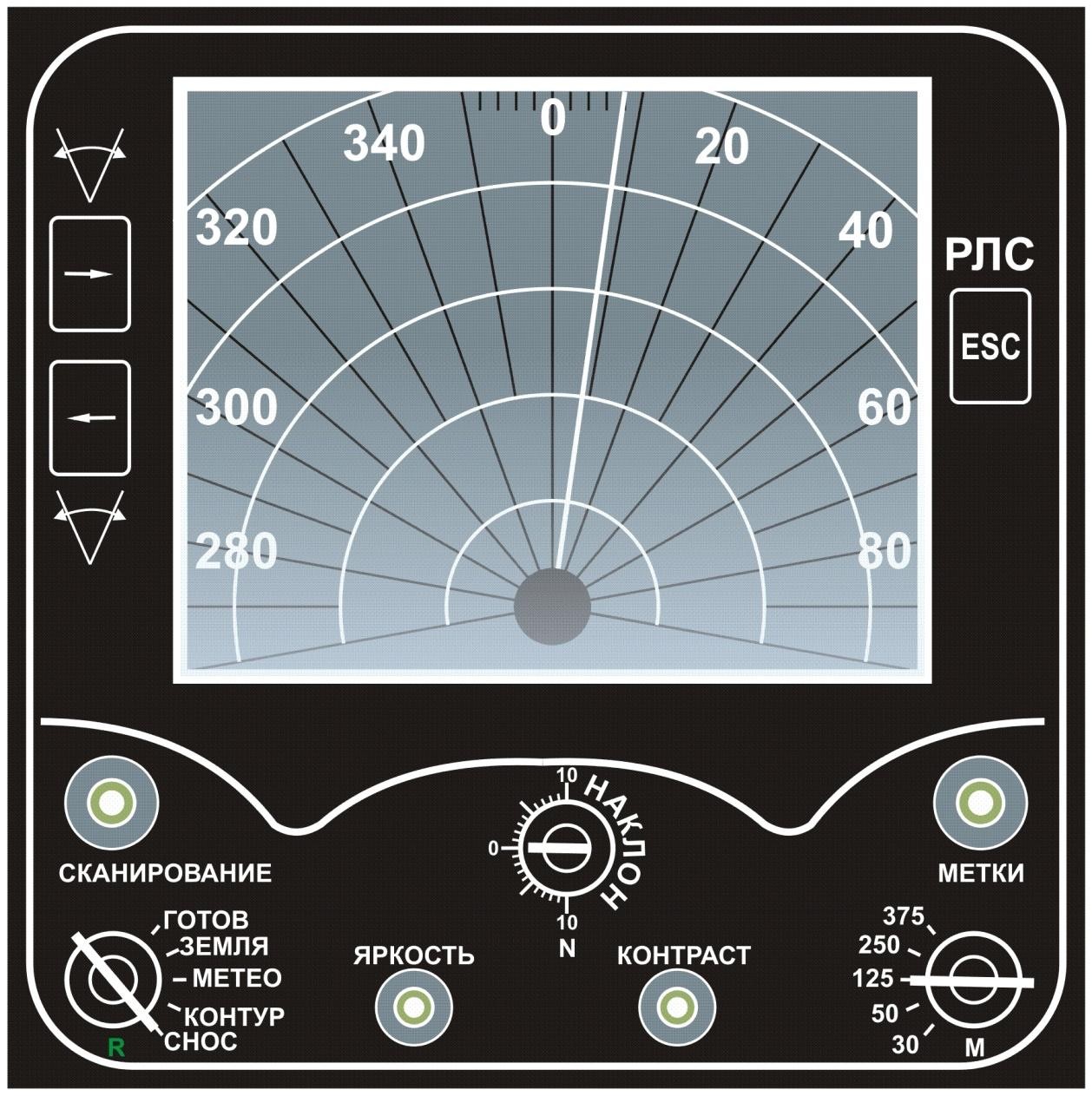
Рис. 9.12. Вид экрана в режиме «Снос»
«Частным» этот случай является потому, что ориентир должен находиться не в любом месте экрана, а вблизи курсовой черты. Кроме того, дальность D2 во второй момент времени должна быть вдвое меньше дальности D1 в первый момент времени. Эти допущения позволяют значительно упростить расчетные формулы.
Пилот должен выбрать подходящий ориентир и две метки дальности такие, что дальность второй метки равна половине первой (например, 100 км и 50 км).
При прохождении первой метки дальности включается секундомер и записывается курсовой угол ψ1 и дальность D1. При прохождении ориентиром второй метки секундомер останавливается, и фиксируются ψ2 и D2. За пройденное время изменится не только дальность, но и курсовой угол ориентира, поскольку ВС из-за угла сноса летит не в направлении курсовой черты.
Путевая скорость рассчитывается обычным способом по пройденному за измеренное время расстоянию на НЛ-10 или, с учетом того, что D1=2D2, по формуле
W=(D1-D2)/t = D2/t.
Угол сноса α определяется по простой формуле
α= 2ψ1 - ψ2. Приведем пример расчета УС таким способом.
Пусть ψ1 = 358°= -2°, ψ2=354°= -6°.
Тогда УС= 2(-2)-(-6)=+2°.