

Расчёт ипс и определение мс по двум радиостанциям.
Для решения некоторых навигационных задач, например, для определения МС, необходимо проложить на карте ЛРПС. Для этого необходимо сначала определить пеленг самолета. Поскольку на любой карте нанесены обычные географические меридианы, называемые в навигации истинными, и именно к ним будет прикладываться транспортир, то речь идет о расчете истинного пеленга самолета (ИПС).
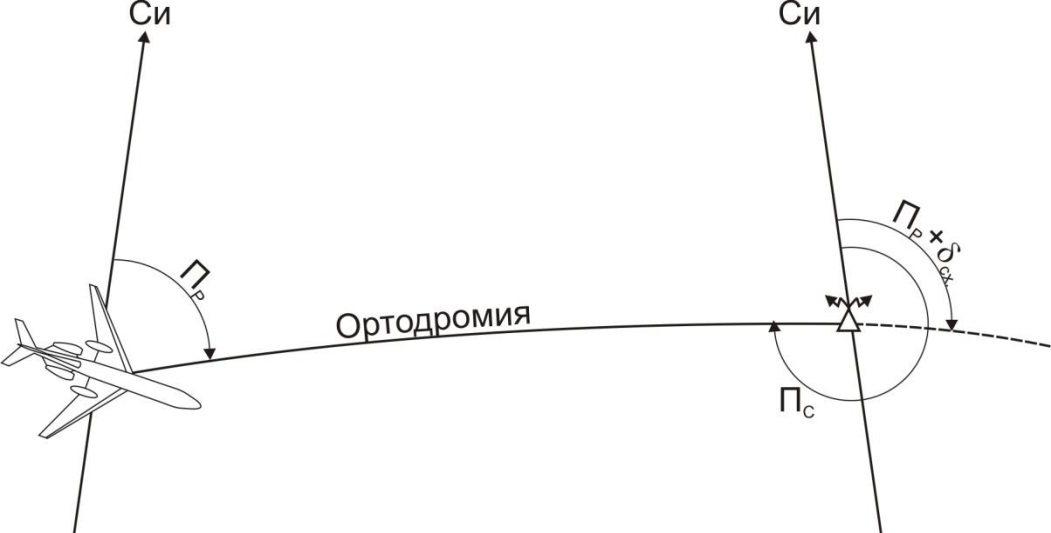
Рис. 3.35. Связь между пеленгом самолета и пеленгом радиостанции Очевидно, что магнитный пеленг самолета можно определить как
МПС=МК+КУР±180.
Как было показано ранее, этот МПС – это направление от РНТ на самолет, измеренное от магнитного меридиана места самолета (поскольку именно от него измерен МК, используемый для расчета МПС). Но ведь на карте нужно проложить ЛРПС на карте от истинного меридиана радиостанции. Следовательно, вновь возникает задача перехода от одного меридиана (магнитного меридиана МС) к другому (истинному меридиану РНТ).
Переход можно выполнить в соответствии с мнемоническим правилом. Для этого к МПС нужно прибавить магнитное склонение в точке расположения ВС (поскольку именно от меридиана МС известен МПС) и учесть угол схождения меридианов, чтобы перейти от истинного меридиана МС к истинному меридиану РНТ.
Расчет с помощью мнемонического правила более удобен и надежен на практике. Если же записать именно формулу для расчета ИПС, она будет выглядеть следующим образом:
ИПС=МК+КУР±180+ΔМ+(λр-λ)sin φср,
где ΔМ – магнитное склонение в районе нахождения МС;
λр - долгота радиостанции;
λ – долгота МС;
φср – средняя широта (РНТ и МС).
В этой формуле первые три слагаемые – это и есть МПС, отсчитанный от меридиана МС (поскольку от него отсчитан МК). Последние два слагаемые обеспечивают переход от магнитного меридиана МС к истинному меридиану РНТ. И еще раз подчеркнем: долгота места самолета λ присутствует в формуле вовсе не потому, что именно там находится ВС, а потому что от этого меридиана измеряется МК!
Из данной формулы следует, что для расчета по ней ИПС необходимо иметь информацию о местонахождении МС (его широту и долготу, магнитное склонение). Но ведь ИПС для того и рассчитывают, чтобы определить МС и, следовательно, оно пока неизвестно. А оказывается, что для расчета ИПС уже нужно знать место самолета! Получается замкнутый круг.
Это является платой за то, что мы пытаемся проложить линию положения не для того навигационного параметра, который непосредственно измерили. Ведь суммированием курса и курсового угла радиостанции мы определяем пеленг радиостанции, который и является измеренным навигационным параметром. Но проложить на карте соответствующую ему линию положения (ЛРПР) трудно, поскольку она имеет сложную форму. Поэтому на практике мы с помощью Пр рассчитываем другой параметр – пеленг самолета (Пс), для которого построить линию положения легче. И для перехода от Пр к Пс как раз и нужна информация о МС, поскольку Пр отсчитан от меридиана МС.
На практике этот «замкнутый круг» не создает особых проблем, поскольку для расчета Пс с точностью до градуса не требуется высокой точности определения долготы и широты самолета, магнитного склонения. В большинстве случаев (за исключением разве что случаев потери ориентировки) пилот представляет себе район возможного нахождения ВС и может по карте определить хотя бы примерные значения координат и ΔМ.
А если для расчета пеленга использован не магнитный, а ортодромический курс? Очевидно, что ортодромический пеленг радиостанции
ОПС=ОК+КУР±180
отсчитывается от выбранного опорного меридиана. Но прокладывать ЛРПС нужно все равно от истинного меридиана РНТ! Следовательно, в этом случае нужно перейти от опорного меридиана к истинному меридиану радиостанции. Это также удобно сделать с помощью мнемонической схемы. Порядок перехода будет зависеть от того, какой меридиан выбран опорным (истинный или магнитный) и какого именно пункта. Интересно, что в этом случае информация о местоположении самолета для расчета ИПС вообще не понадобится. Ведь переход будет выполняться от опорного меридиана к меридиану РНТ, а где находится самолет - не имеет значения.
Например, если в качестве опорного меридиана выбран магнитный меридиан точки с долготой λ0, например, аэродрома вылета, то
ИПС=ОК+КУР±180 +ΔМ0 +(λр-λ0)sinφср .
Предпоследнее слагаемое этой формулы обеспечивает переход от магнитного меридиана аэродрома вылета (он является опорным) к истинному меридиану этого аэродрома. А с помощью последнего слагаемого выполняется переход от истинного меридиана аэродрома к истинному меридиану РНТ.
Определение места самолета по двум радиостанциям
Определение места самолета – это полный контроль пути, поскольку если известно место самолета, то можно определить и уклонение от ЛЗП (контроль пути по направлению), и пройденное или оставшееся расстояние (контроль пути по дальности).
Определять МС по двум РНТ удобно в случае, когда на борту имеется два комплекта АРК, каждый из которых можно настроить на свою радиостанцию. Разумеется, перед определением МС пилот должен убедиться, что АРК правильно настроены, прослушать позывные ОПРС.
По возможности одновременно необходимо зафиксировать по приборам и записать: время, курс, курсовые углы обеих радиостанций (КУР1 и КУР2).
При наличии указателя типа РМИ удобнее, конечно, вместо КУР сразу отсчитать и записать МПС1 и МПС2 (напротив тупых концов стрелок).
Время необходимо записать потому, что расчет и прокладка пеленгов займут определенное время и пилот, определив наконец МС, должен знать к какому моменту времени это МС относится – ведь самолет продолжает движение.
После этого необходимо рассчитать ИПС от обеих радиостанций:
ИПС1=МК+КУР1±180+ΔМ+(λр1-λ)sin φср, (3.6)
ИПС2=МК+КУР2±180+ ΔМ+ (λр2-λ)sin φср.
Здесь λр1 и λр2 - долготы первой и второй радиостанции, а λ – долгота места самолета.
В обеих этих формулах МК (магнитный курс) и ΔМ (магнитное склонение в районе нахождения ВС) имеют одно и то же значение. Различными будут значения КУР и координаты радиостанций.
Если с РМИ были отсчитаны МПС, а не КУР, то к ним нужно прибавить только ΔМ и угол схождения меридианов. Ведь первые три слагаемые в приведенных формулах – это уже и есть МПС, отсчитанный с РМИ.
Как уже упоминалось ранее, для расчета по этим формулам в принципе уже необходимо знать хотя бы примерное местонахождение самолета, чтобы определить магнитное склонение, а также широту и долготу ВС для учета угла схождения меридианов. Если эти величины примерно известны (хотя бы с точностью до градуса), то расчет ИПС можно выполнить сразу по данным формулам. Если же в их примерных значениях нет уверенности или требуется определить МС поточнее, то можно определить МС в два этапа. На первом этапе рассчитать ИПС без учета угла схождения меридианов:
ИПС=МК+КУР±180 + ΔМ.
При этом можно использовать какое-либо предполагаемое значение магнитного склонения. Если оно потом окажется не таким, это можно будет исправить на втором этапе.
По полученным приблизительным ИПС строятся ЛРПС в виде прямых линий на карте и по точке их пересечения определяется район вероятного МС. Теперь, когда приблизительное МС уже известно, можно уточнить ΔМ, а также определить приближенную широту и долготу самолета. К приближенным ИПС нужно прибавить углы схождения меридианов и поправку в величину ΔМ, если оно на первом этапе было определено неточно.
Проложив ЛРПС по полученным более точным значениям ИПС, получим МС (рис. 3.40). Его принято обозначать на карте крестиком с указанием времени, к которому оно относится.
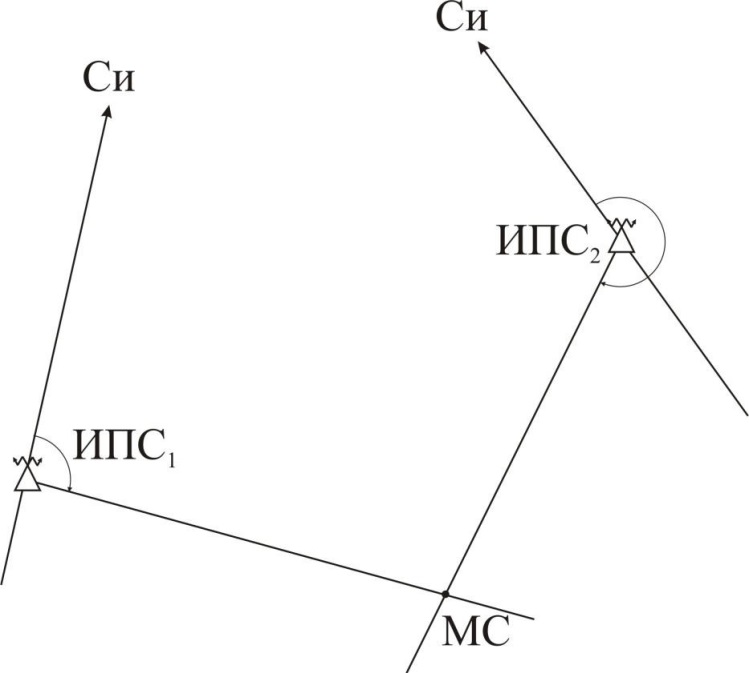
Рис. 3.40. Определение МС по двум радиостанциям
Вместо того, чтобы учесть угол схождения δсх по формулам (это последнее слагаемое в формулах (3.6)), можно воспользоваться упоминавшимся ранее правилом перехода от одного меридиана к другому. Ведь то, что рассчитано в этих формулах до учета угла схождения меридианов, это тоже ИПС, но только отсчитанный от истинного меридиана места самолета. Остается перейти от него к истинному меридиану радиостанции. Для этого, в соответствии с правилом, при переходе в восточном направлении модуль δсх прибавляется, а если радиостанция западнее самолета – вычитается.
Есть еще один простой способ проверить, с правильным ли знаком учтен угол схождения меридианов. Если δсх учтен правильно (в нужную сторону), то в северном полушарии Земли ЛРПС должны сместиться к северу (на карте как бы вверх). На рис. 3.41 сплошными линиями обозначены ЛРПС без учета δсх, а пунктирными – когда угол схождения меридианов правильно учтен.

Рис. 3.41. Изменение пеленгов после учета угла схождения меридианов
Разумеется, крестик на карте, обозначающий полученное МС, вовсе не означает абсолютно точное место, в котором в данный момент времени находился самолет. Точность определения МС зависит от многих факторов, основными из которых являются следующие.
Точность определения пеленгов. Все величины, входящие в формулу для расчета ИПС, не являются абсолютно точными. Погрешности определения каждой из них складываются. Точность определения курса характеризуется средней квадратической погрешностью порядка 1º, курсового угла радиостанции 2-3º . Не абсолютно точным является и магнитное склонение, да и долгота самолета, учитываемая при учете угла схождения меридианов. Суммарная СКП определения пеленга составляет около 3º .
Удаление от самолета до каждой из РНТ. Поскольку пеленги рассчитаны неточно, то и ЛРПС проложены не в нужном направлении. А ведь каждый градус погрешности на удалении около 60 км дает линейное смещение ЛРПС величиной в 1 км. Поэтому чем дальше ВС от радиостанции, тем более неточно проходит линия положения.
Погрешности графической работы на карте. Вообразим, что пеленги рассчитаны абсолютно точно. Значит ли это, что совершенно точным будет и МС на карте. Разумеется, нет. Ведь пилот будет прокладывать эти пеленги транспортиром. На какие-то доли градуса он ошибется при выравнивании транспортира по меридиану, какую-то погрешность допустит при отсчете угла. Эксперименты показывают, что СКП графической работы на карте при отсчете углов по транспортиру составляют около 0,8º .
Угол пересечения линий положения. На первый взгляд это может оказаться неожиданным, но при прочих равных условиях точность определения МС по двум линиям положения зависит от того под каким углом ω они пересекаются друг с другом. Точность обратно пропорциональна синусу этого угла. Поскольку максимальное значение синус имеет при ω=90º, то в этом случае при прочих равных условиях и будет достигнута максимальная точность. Если же ω=30º, то точность будет вдвое ниже (sin 30º=0,5). А если линии положения пересекаются под совсем уж острым углом, то и погрешность определения МС может быть громадной (рис. 3.42). В предельном случае, когда ω=0, определить МС вообще невозможно, поскольку обе ЛРПС совпадут, то есть «пересекутся» во всех своих точках.
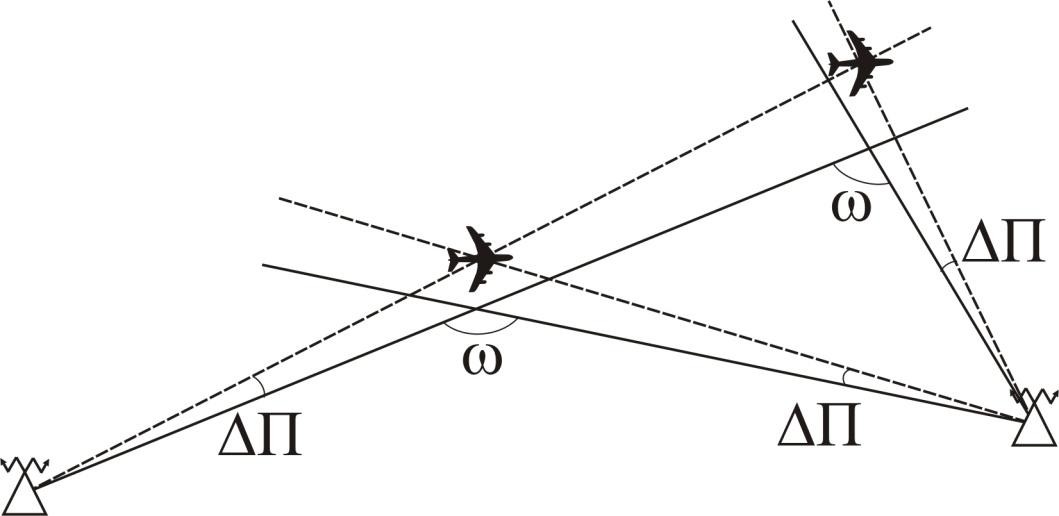
Рис. 3.42. Влияние угла пересечения ЛРПС на точность определения МС
Более подробный анализ точности определения МС проводится при изучении дисциплины «Аэронавигационное обеспечение полетов». Но и из уже изложенного можно сделать полезные для практики выводы.
Если в районе местоположения ВС имеется несколько ОПРС, то следует выбрать те две из них, которые, во-первых, ближе, а во-вторых такие, чтобы разность пеленгов (или разность КУР – она почти такая же) была ближе к 90º.
Для наглядного представления о достигаемой точности определения МС по двум радиостанциям приведем пример для следующих условий: Удаление до каждой РНТ составляет 100 км, ЛРПС пересекаются под углом 60º .
В этом случае в 80 случаях из 100 (в среднем, конечно) полученное на карте МС будет находиться не далее 10 км от фактического МС. А в 20 случаях из 100 погрешность будет больше 10 км. Понятно, что это не очень высокая точность, несмотря на не столь уж неблагоприятные условия (дальности и угол пересечения могут быть и хуже).