

Основные сведения о курсовых системах. Режим магнитной коррекции.
Каждый из двух рассмотренных принципов измерения курса – магнитный и гироскопический – имеет свои достоинства и недостатки.
Магнитный компас обладает тем достоинством, что позволяет именно измерить курс, то есть он сам может определить направление продольной оси ВС относительно меридиана. Но он обладает и многими недостатками. Во-первых, он подвержен различным видам девиации. Во-вторых, его практически нельзя использовать в полярных районах. В-третьих, с помощью магнитного компаса трудно выполнить полет по ортодромии.
Гироскопические компасы, наоборот, обеспечивают выполнение полета по ортодромии и девиация у них отсутствует. Но у них свои проблемы. Гирополукомпас не измеряет курс, то есть сам не может определить, где север, а где юг. Можно только выставить ось гироскопа по нужному направлению и измерять курс именно от него. Кроме того, гироскоп имеет собственный уход и другие виды погрешностей.
Естественно, уже давно появилась идея объединить два принципа измерения курса в одном устройстве таким образом, чтобы использовались достоинства обоих этих принципов, а их недостатки взаимно компенсировались. Такие курсовые приборы и назвали курсовыми системами.
Курсовыми системами называют комплексные измерители курса ВС, объединяющие датчики, основанные на различных физических принципах.
В гражданской авиации России используются самые разные типы курсовых систем (КС-8, КС-10, ГМК-1, ТКС-П2 и другие). Конечно, конструктивно они устроены по-разному, но принцип действия и составные части у них почти одинаковы. Рассмотрим типичный состав курсовой системы.
1. Индукционный датчик (ИД) является чувствительным элементом современного магнитного компаса, реагирующим на магнитное поле Земли, то есть играет ту же роль, что и намагниченная картушка в КИ-13. Но ИД, в отличие от КИ-13, является электрическим устройством, на выходе которого снимается напряжение, зависящее от величины магнитного курса и которое по проводам можно передать на расстояние – от места установки ИД в кабину экипажа.
ИД имеет круглый корпус (рис.5.43), внутри которого находятся три расположенных в горизонтальной плоскости и соединенных в форме треугольника стержня, изготовленных из пермалоя (сплава железа и никеля). Все три стержня имеют две общие обмотки. На одну из них (намагничивающую) подается переменное напряжение, а с другой (сигнальной) напряжение снимается. В зависимости от того, как ориентирован ИД относительно магнитного меридиана (силовых линий магнитного поля Земли), с сигнальной обмотки снимается разная величина напряжения (ЭДС).
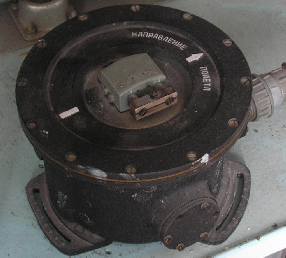
Рис.5.43. Индукционный датчик с девиационным прибором
На крышке ИД может быть размещен девиационный прибор. Так же как девиационный прибор в КИ-13, он предназначен для компенсации полукруговой девиации и представляет собой систему из двух постоянных магнитов.
С выхода ИД поступает электрический сигнал, соответствующий компасному курсу, то есть магнитный курс, но подверженный искажению всеми видами девиаций (за исключением, может быть, полукруговой, если она устранена девиационным прибором). Вследствие этого, даже если ВС на самом деле летит прямолинейно, измеренный с помощью ИД компасный курс имеет флуктуации – случайные отклонения от среднего значения, вызванные креновыми и ускорительными девиациями, включением электрических цепей на борту и т.п. Эти отклонения значительно меньше, чем у картушки КИ-13. Тем не менее, курс, полученный от ИД, является не вполне точным.
2. Коррекционный механизм (КМ) предназначен для связи индукционного датчика с другими устройствами курсовой системы. Компасный курс в виде электрического сигнала поступает в КМ, в котором полностью или частично может быть компенсирована четвертная девиация. Этим и объясняется название устройства (коррекция – это исправление).
На КМ имеется шкала (рис.5.44), по которой можно отсчитать поступающий от ИД компасный курс. Имеется и кремальера для установки на этой же шкале магнитного склонения. При вводе ΔМ курс на выходе КМ увеличится на соответствующую величину (то есть, к магнитному курсу прибавится ΔМ и получится истинный курс), но на самой шкале КМ курс останется прежним.
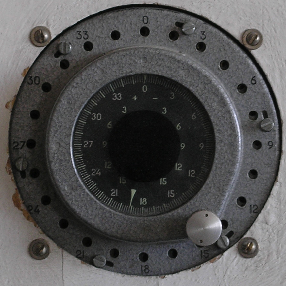
Рис. 5.44. Коррекционный механизм
Вокруг шкалы через каждые 15º имеются винты лекального устройства, при вращении которых и устраняется четвертная девиация на соответствующем курсе.
3. Гироагрегат (ГА) представляет собой заключенный в корпус курсовой гироскоп в кардановом подвесе, снабженный необходимыми для его работы устройствами (электродвигателями, механизмами коррекции, реле отключения коррекции и т.д.). Это основная часть любой курсовой системы (рис.5.45).

Рис. 5.45. Внешний вид гироагрегата
4. Указатели курса − это любые индикаторы, на которых можно отсчитать курс, измеренный курсовой системой. Все курсовые системы можно отнести к классу дистанционных компасов, поскольку чувствительные элементы (ИД, ГА) находятся в таких местах ВС, которые наиболее удобны и целесообразны для их размещения, а указатели курса размещаются всегда на приборной доске пилота.
Указатели могут быть различного вида в зависимости от типа курсовой системы и типа ВС. Обычно указателей в кабине несколько (как минимум, для левого и правого пилотов). Если на данном типе ВС предусмотрено рабочее место штурмана, то его указатель является основным и может иметь вид, отличный от вида указателей пилотов.
Указатели по своему устройству можно разделить на два вида. В первом из них шкала курсов вращается, и курс отсчитывается по ней напротив неподвижного треугольного индекса (как в ГПК-52). Во второй разновидности указателей шкала сама не вращается (правда, в некоторых указателях ее для удобства можно развернуть вручную с помощью кремальеры), а курс отсчитывается против подвижной стрелки, которая иногда выполнена в виде силуэта самолета.
5. Выключатель коррекции (ВК) - это уже упоминавшееся небольшое устройство с двухстепенным гироскопом, которое автоматически выключает коррекцию во время разворота.
6. Пульт управления (ПУ) − это устройство для управления курсовой системой. Конечно, его вид зависит от типа курсовой системы. Вид ПУ зависит от типа курсовой системы, но как правило, на пульте имеются следующие органы управления:
- переключатель режимов работы;
- задатчик курса;
- рукоятка установки широты («широтный потенциометр»);
- переключатель «Север-Юг»;
- кнопка быстрого согласования.
Конечно, любая курсовая система включает в себя и другие составные части (усилители, блоки связи с другими системами и т.п.), которые здесь не перечислены, поскольку являются вспомогательными либо присутствуют только в конкретных типах курсовых систем.
Курсовая система может иметь два или три режима работы, один из которых пилот сам выбирает с помощью переключателя режимов.
1. «ГПК» - режим гирополукомпаса. В этом режиме курсовая система работает аналогично ГПК-52. Пилот выбирает направление опорного меридиана, устанавливает по нему ось гироскопа с помощью задатчика курса и измеряет в полете ортодромический курс. ИД и КМ никак не участвуют в работе этого режима. Режим «ГПК» является основным на современных самолетах, поскольку обеспечивает выполнение полета по ортодромии.
2. «МК» - режим магнитной коррекции. В этом режиме магнитный курс, измеренный с помощью ИД, осредняется с помощью ГА для фильтрации вредных флуктуаций. Более подробно работу этого режима рассмотрим далее. Можно считать, что в этом режиме курсовая система измеряет МК, то есть курс относительно текущего магнитного меридиана места самолета. На современных ВС этот режим используется только для начальной выставки или коррекции оси гироскопа, хотя большинство типов ВС допускает выполнение всего полета в этом режиме. Разумеется, в этом случае курсовая система будет использоваться как локсодромический курсовой прибор.
3. «АК» - режим астрономической коррекции. Этот режим предусмотрен не во всех типах курсовых систем. Но даже при его наличии, кроме основного оборудования курсовой системы, на борту ВС дополнительно должно быть установлено специальное устройство – астрономический компас. С его помощью курсовая система может определять истинный или ортодромический курс на основе пеленгации астрономическим компасом небесных светил (как правило, Солнца). В настоящее время на самолетах гражданской авиации астрономический компас не устанавливается, поэтому режим «АК», даже если он предусмотрен в курсовой системе, не задействован.
Благодаря объединению в курсовой системе магнитного и гироскопического датчиков курса упрощается выставка оси гироскопа по опорному меридиану для полета в режиме «ГПК», особенно если опорным меридианом выбран магнитный меридиан аэродрома вылета. В этом случае нет необходимости пользоваться посторонним магнитным компасом и затем выставлять магнитный курс на курсовой системе вручную с помощью задатчика курса. Достаточно установить режим «МК» (подключится магнитная коррекция), нажать кнопку согласования (ось гироскопа быстро установится по магнитному меридиану) и переключить систему в режим «ГПК». При этом магнитная коррекция отключится, а ось гироскопа будет сохранять выставленное направление.
Режим магнитной коррекции
Как уже отмечалось, в режиме «ГПК» курсовая система работает аналогично обычному гирополукомпасу, поэтому этот режим не требует дополнительного отдельного рассмотрения.
Рассмотрим работу курсовой системы в режиме магнитной коррекции, в котором наиболее ярко проявляются достоинства совместного использования положительных сторон как магнитного, так и гироскопического принципов измерения курса.
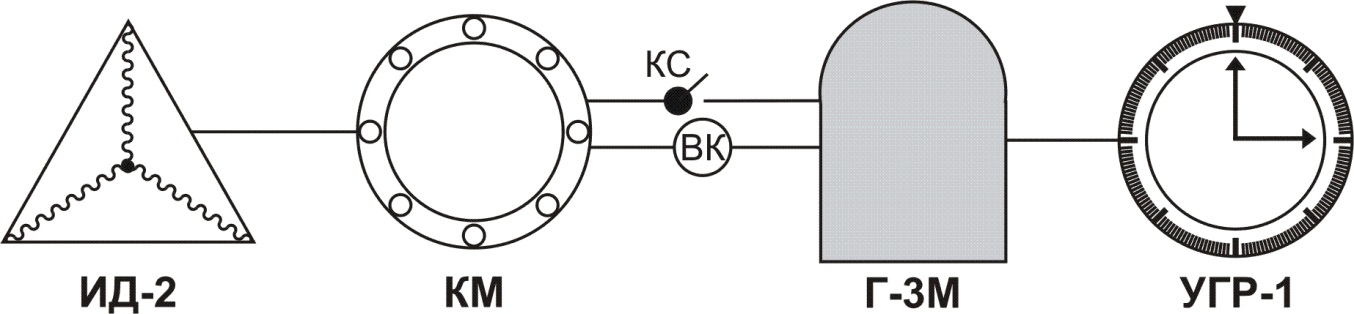
Рис. 5.46. Работа курсовой системы в режиме магнитной коррекции
В режиме «МК» задействованы все основные части курсовой системы (рис. 5.46). Начнем рассмотрение работы данного режима с конца.
В первую очередь нужно иметь в виду, что на указателях всегда, независимо от режима работы системы, индицируется курс, равный углу между осью гироскопа и продольной осью самолета. Так же сделано и в обычных гирополукомпасах, например, в ГПК-52. Но в ГПК-52 и в режиме «ГПК» курсовой системы гироскоп остается свободным и сохраняет направление меридиана начальной выставки. В режиме «МК» он не сохраняет выставленное положение, а «по подсказке» индукционного датчика в процессе полета непрерывно ориентируется по направлению текущего магнитного меридиана. Эту задачу решает следящая система, которая работает следующим образом.
Индукционный датчик измеряет компасный курс, который в виде электрического сигнала через коррекционный механизм поступает в гироагрегат. Поскольку нормальная статическая девиация после коррекционного механизма уже полностью или частично устранена, будем называть его магнитным курсом. Если направление оси гироскопа в ГА не совпадает с направлением магнитного меридиана, которое определил ИД, то начинает работать электродвигатель следящей системы. Он создает момент сил, который разворачивает ось гироскопа в сторону меридиана. А пилот, как уже отмечалось, и видит на указателе курса угол между осью гироскопа и продольной осью ВС.
Таким образом, на протяжении всего полета следящая система стремится удерживать ось гироскопа по направлению магнитного меридиана места самолета и, следовательно, на указателе должен индицироваться текущий магнитный курс.
Может возникнуть вопрос, а какова тут вообще роль гироскопа? Зачем нужно сначала разворачивать ось гироскопа по меридиану, а потом уже показывать от этой оси курс? Не проще ли сразу сигнал, соответствующий магнитному курсу, подать от КМ на указатель? Конечно, можно. Но такой магнитный курс включал бы в себя все случайные флуктуационные погрешности из-за ускорительной и креновой девиации, влияния полей, создаваемых электрическими цепями самолета, и т.п. Поэтому даже при строго прямолинейном полете такой курс на указателе непрерывно бы изменялся, становясь то больше, то меньше фактического. А ведь пилот должен выдерживать заданный ему курс. Ему бы пришлось, работая рулями, непрерывно отслеживать все эти колебания курса, «гоняясь» за заданным. В результате ВС на самом деле летело бы уже не прямолинейно.
Избавиться от мелких колебаний магнитного курса как раз позволяет гироскоп. Основная идея заключается в том, что согласование магнитного (измеренного ИД) и гироскопического (отсчитываемого от оси гироскопа) курсов осуществляется очень медленно. Двигатель механизма магнитной коррекции поворачивает ось гироскопа в сторону магнитного меридиана со скоростью 1-5° в минуту и из-за такой маленькой скорости гироскоп просто не успевает отслеживать быстроменяющиеся погрешности курса. Например, возникла девиация величиной +5°, то есть на такую величину разошлись значения гироскопического и измеренного магнитного (компасного) курсов. Двигатель тут же начнет поворачивать ось гироскопа так, чтобы устранить это расхождение. Но не успеет он его устранить, как погрешность возможно приняла уже другую величину и противоположный знак. И двигатель, так и не успев значительно отвести ось гироскопа от первоначального положения, будет теперь поворачивать эту ось уже в другую сторону. Таким образом, гироскоп как бы сглаживает, демпфирует, фильтрует погрешности. Вследствие этого индицируемый на указателе курс является более устойчивым, более плавно меняющимся и более близким к фактическому магнитному курсу. Такой сглаженный гироскопом курс называют гиромагнитным.
Такой симбиоз магнитного и гироскопического датчиков курса позволяет взаимно компенсировать их недостатки и использовать достоинства. Гироскоп «не знает» направления магнитного меридиана, но ему «подсказывает» ИД, устраняя заодно и уход гироскопа из-за вращения Земли. В свою очередь, гироскоп фильтрует погрешности магнитного курса, поступающего от ИД.
Таким образом, главную роль в режиме «МК» играет малая скорость согласования гироскопического и магнитного курсов. Но иногда требуется большая скорость. Например, при включении курсовой системы ось гироскопа находится в произвольном положении и может на десятки градусов отстоять от направления магнитного меридиана. Конечно, двигатель в конце концов приведет ее к нужному положению, но это может занять очень много времени. Для того, чтобы согласование проходило быстрее, имеется «кнопка быстрого согласования», которая в нажатом положении увеличивает скорость работы следящей системы примерно до 10° в секунду. Ось гироскопа быстро устанавливается по направлению магнитного меридиана и указатель покажет магнитный курс. При отпускании нажатой кнопки скорость согласования вновь становится медленной. Кнопка согласования используется и в полете всякий раз, когда нужно быстро привести ось гироскопа к текущему магнитному меридиану (например, после разворота).
Во время разворота возникает ускорительная девиация (поворотная ошибка) индукционного датчика, которая может достигать значительных величин. В этом случае за время разворота ИД может «увести» ось гироскопа от настоящего магнитного меридиана. Чтобы этого не происходило, уже упоминавшийся выключатель коррекции (ВК) через несколько секунд после начала разворота автоматически отключает магнитную коррекцию, то есть разрывает связи ИД с гироагрегатом. Гироскоп становится свободным, то есть ведет себя как в режиме «ГПК», сохраняя то направление, которое было в момент отключения. Но и сам гироскоп, как известно, подвержен виражной погрешности, вызываемой работой механизма горизонтальной коррекции. Из-за нее он во время разворота может уйти от заданного направления. Чтобы этого не происходило, тот же ВК выключает и механизм горизонтальной коррекции (жидкостной маятниковый переключатель).
Когда ВС вышло из разворота, ВК включает оба вида коррекции и ось гироскопа вновь продолжает отслеживать направление магнитного меридиана.