

Влияние нелинейностей на устойчивость и качество сс
 Влияние
однозначных нелинейностей на динамику
.
Влияние
однозначных нелинейностей на динамику
.
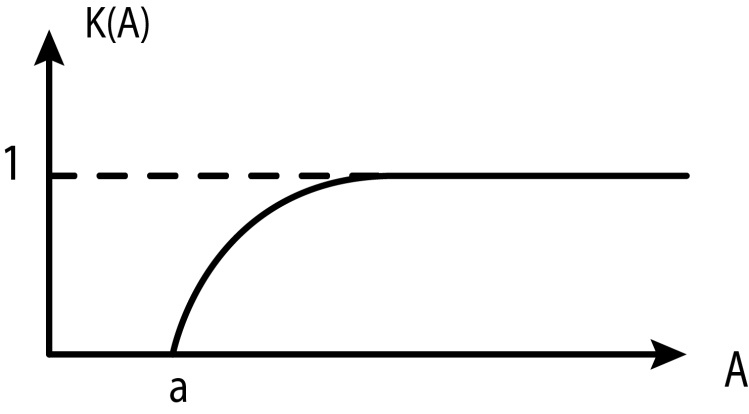
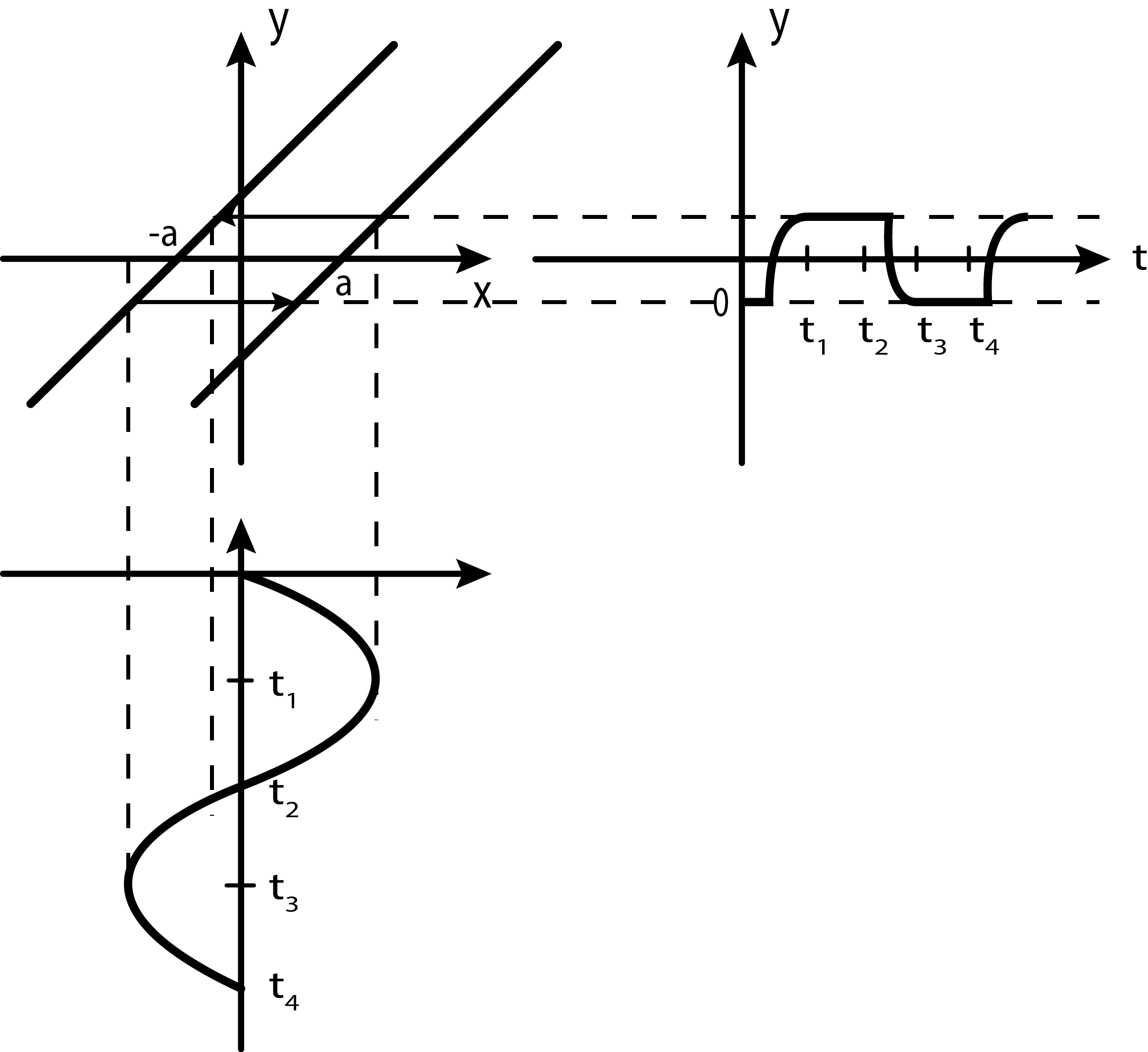
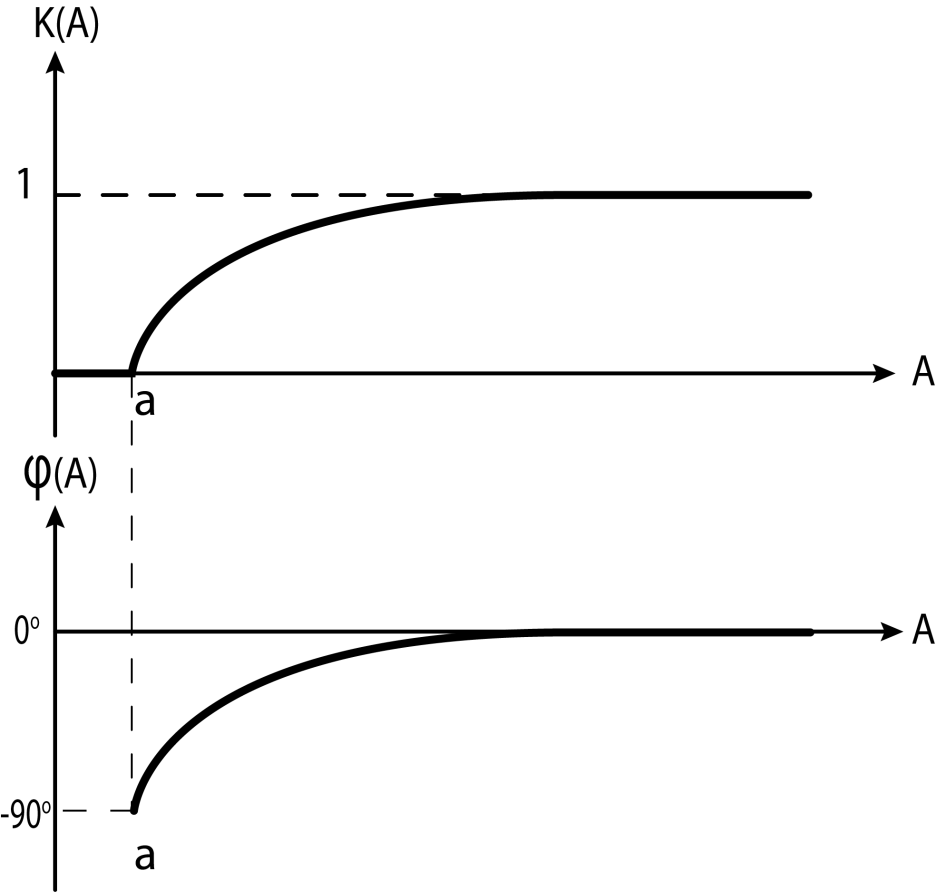
Вспомним, что такое эквивалентный комплексный коэффициент усиления.








 амплитудное
значение
амплитудное
значение










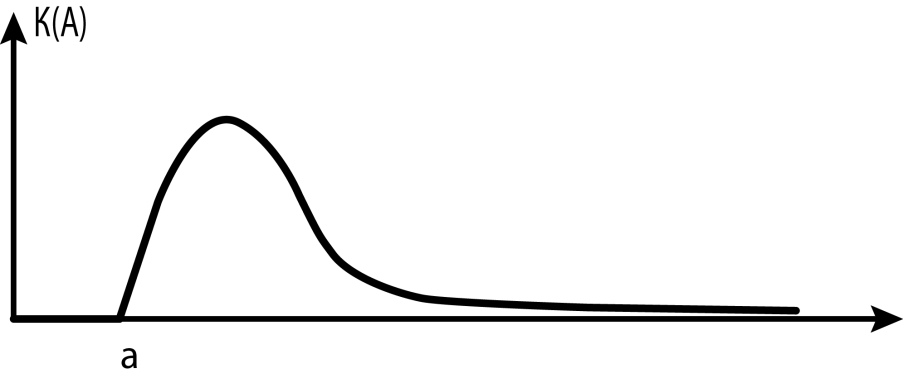
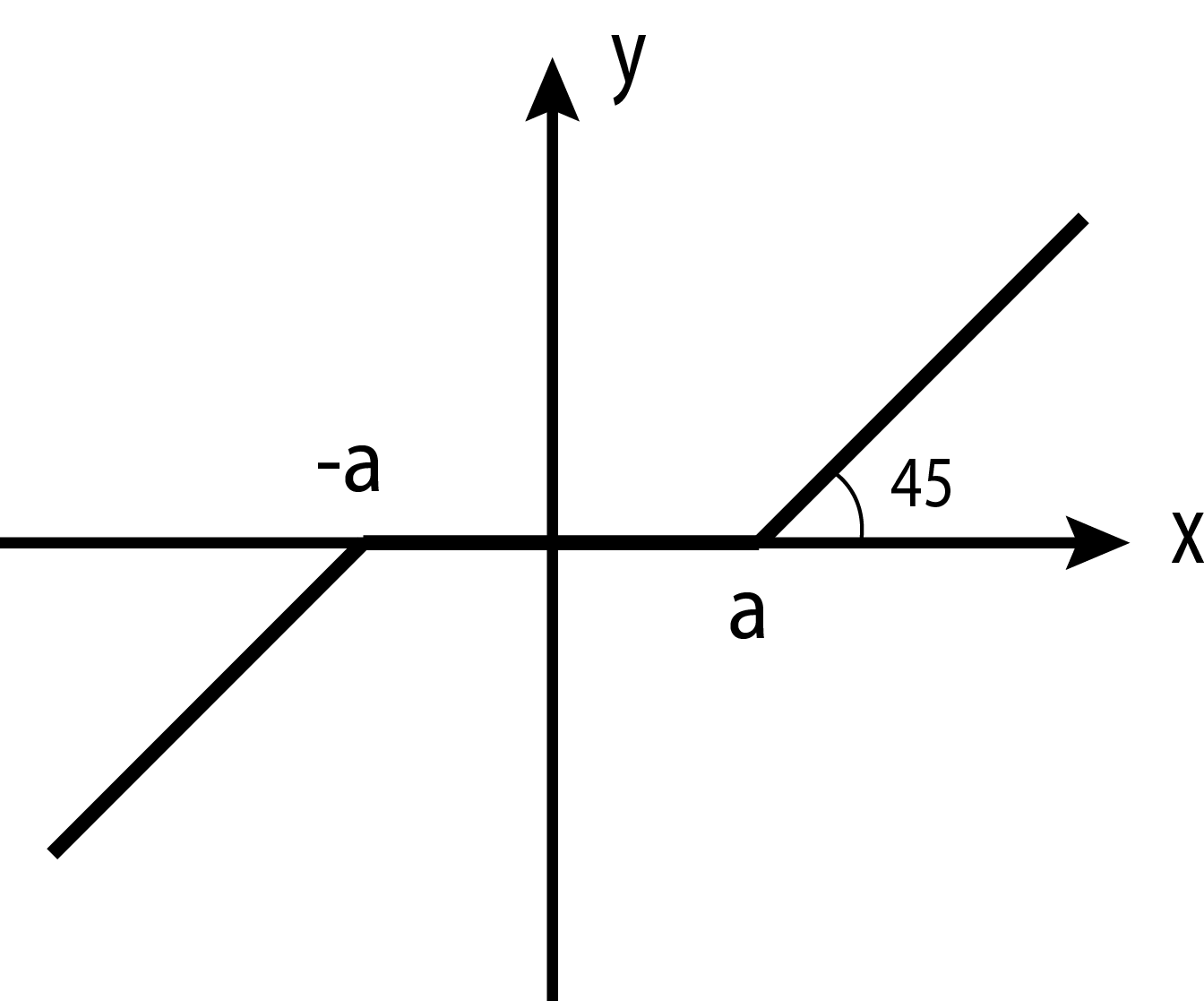
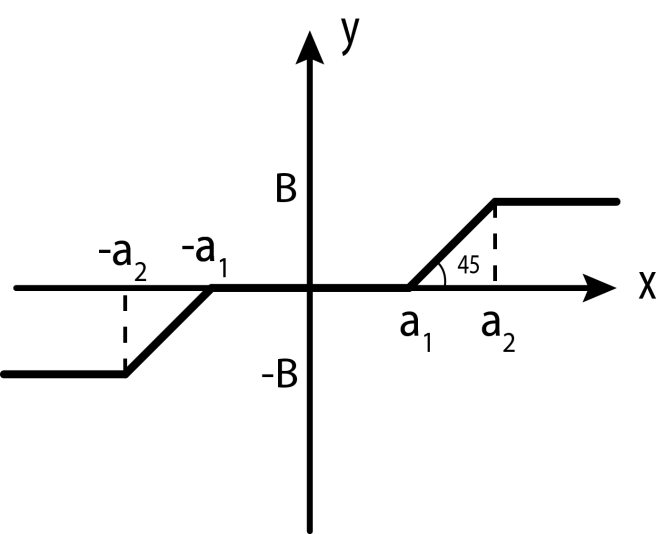
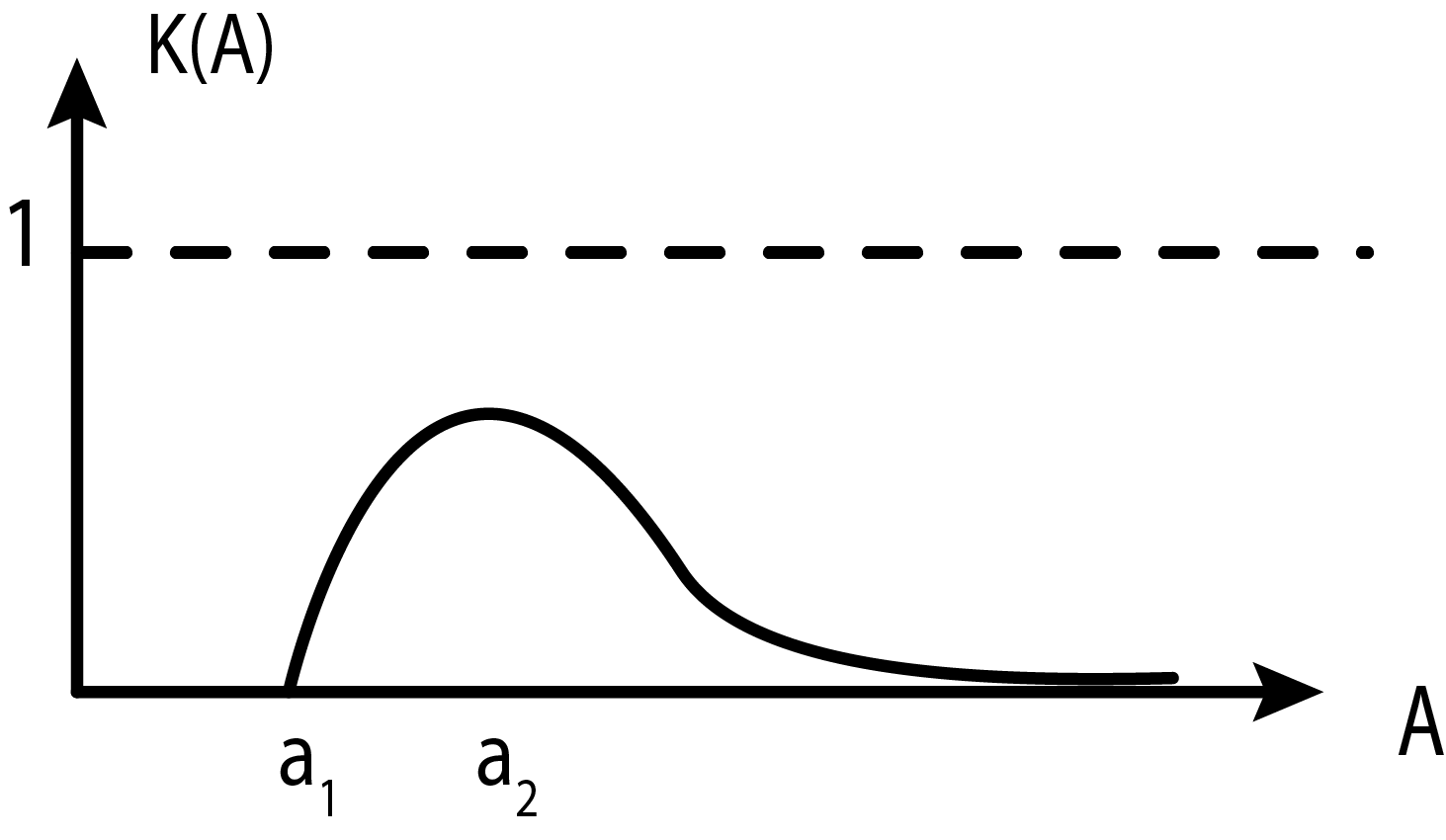
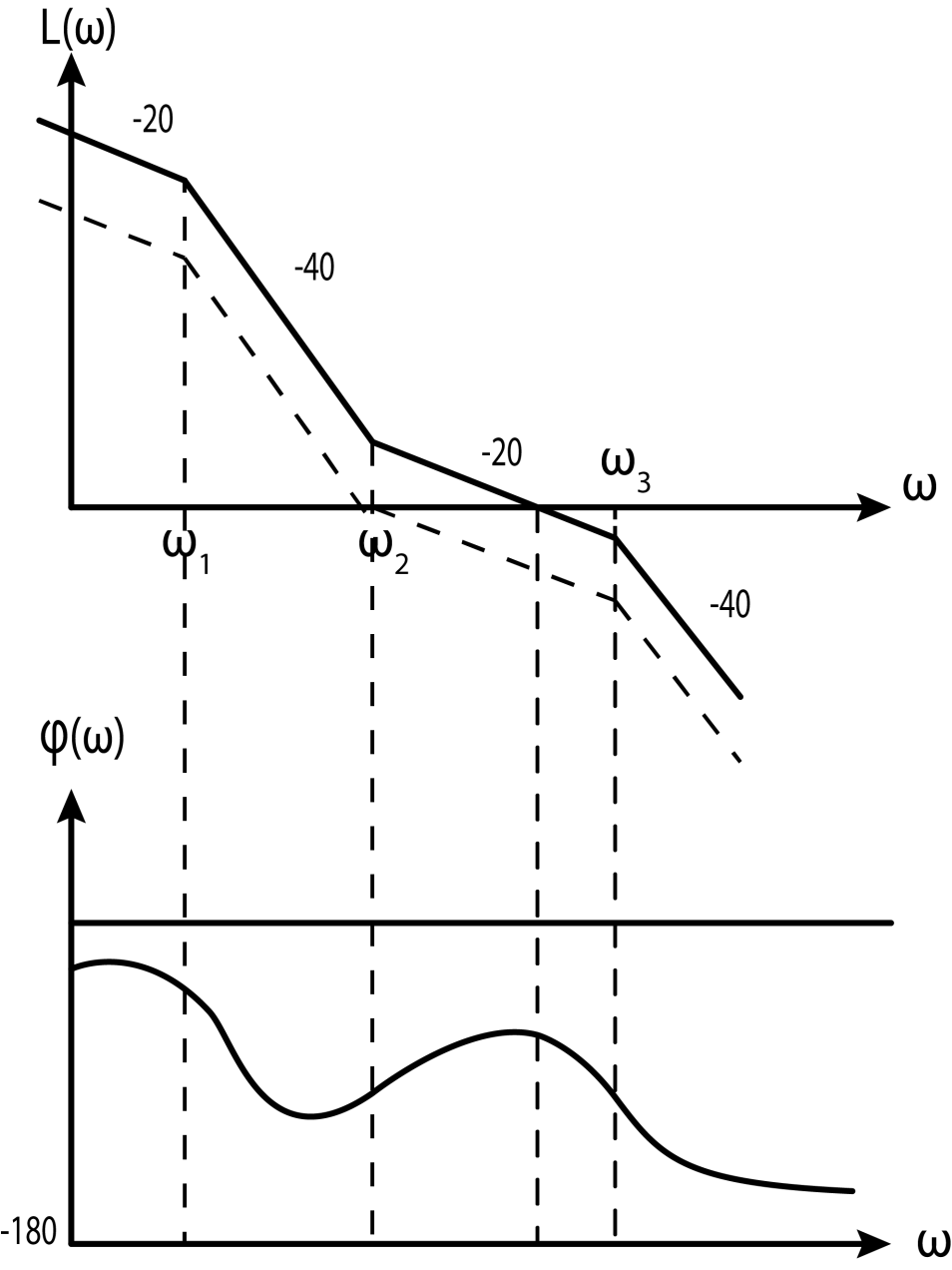
Если нелинейность в виде зоны нечувствительности
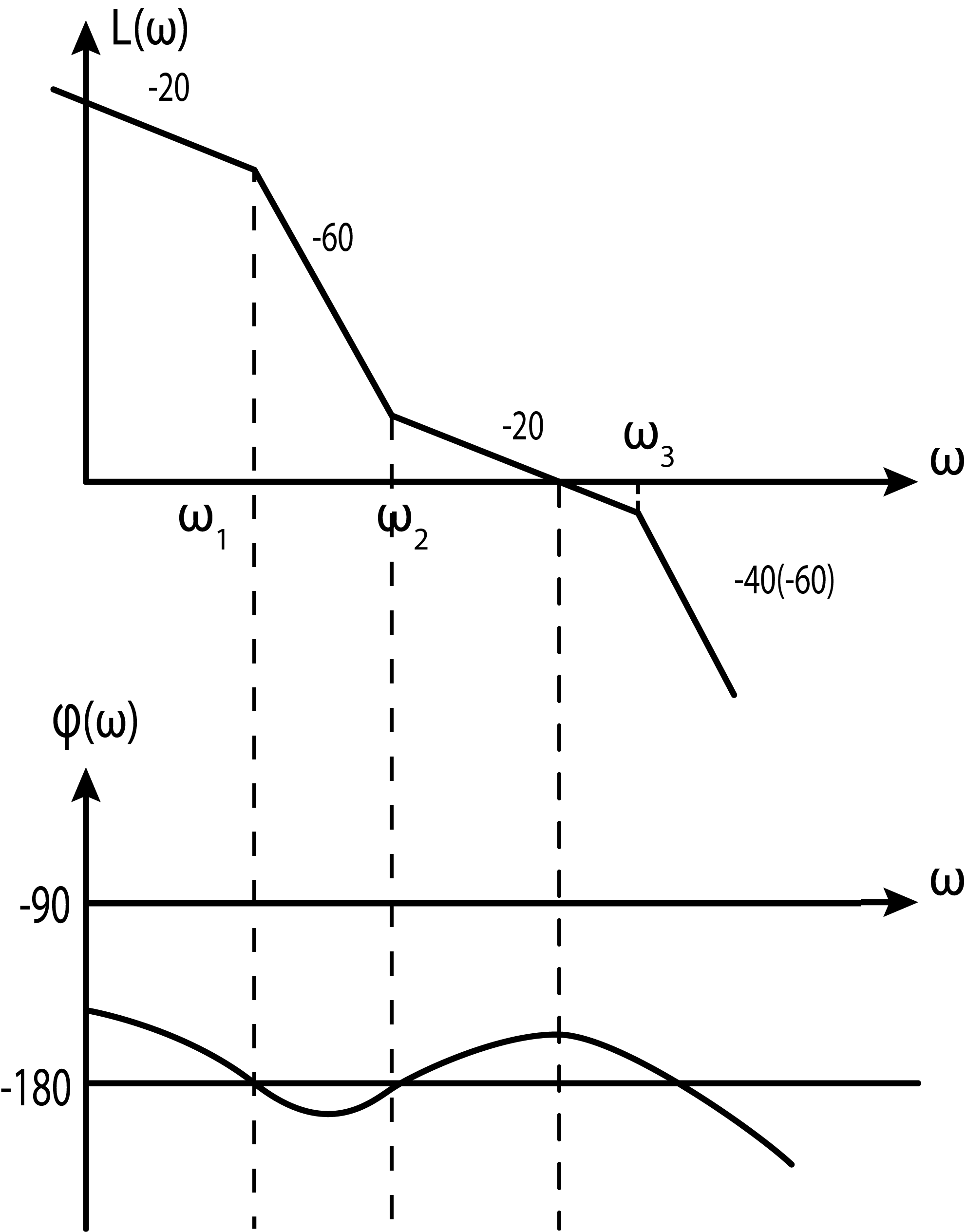
Нелинейность типа ограничения
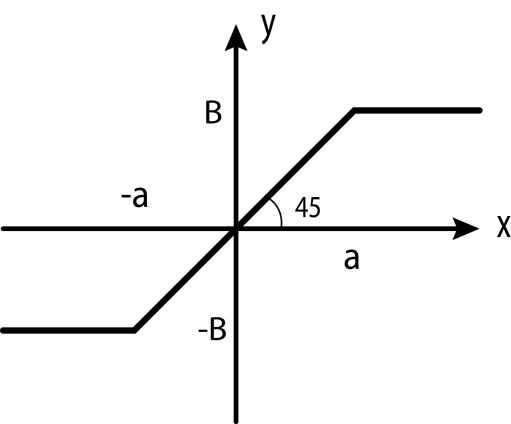

При
действии последнего типа нелинейности
опускание
 приведет
к изменению
приведет
к изменению
 ,
но нигде
не дает запаса по фазе
,
но нигде
не дает запаса по фазе
 ,
а
,
а
 ,
т.е. не дает условий возникновения
колебаний.
,
т.е. не дает условий возникновения
колебаний.
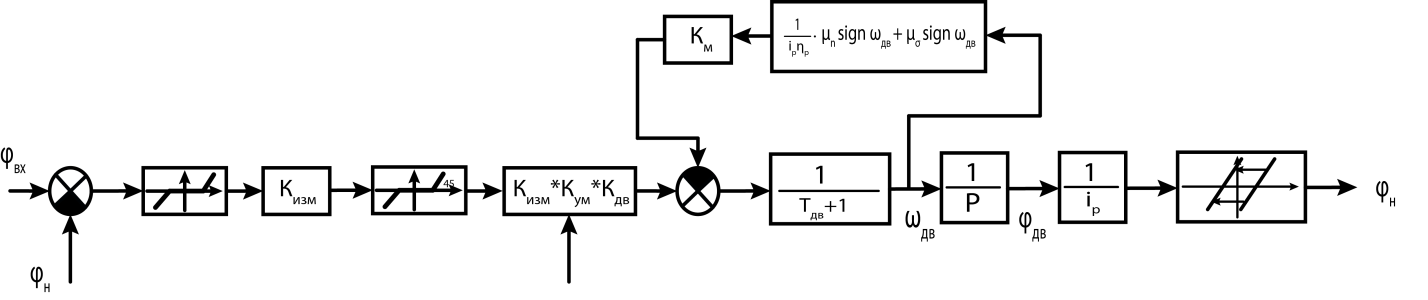
Лекция №12
Люфт редуктора.
Чем больше люфт, тем хуже.
Ограничение или насыщение увеличивает длительность переходного процесса.
Люфт дает ошибки и может вызвать потерю устойчивости и появление автоколебаний.
По мере износа системы люфт увеличивается и проблемы усиливаются.
Момент сил сухого трения увеличивает ошибки, но способствует устранению автоколебаний при наличии люфта.