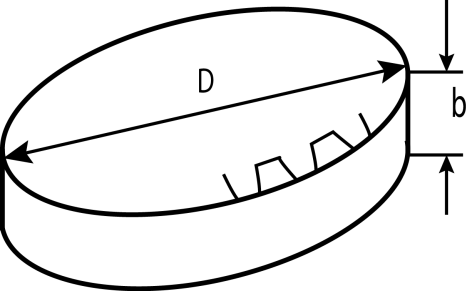
Выбор модуля зуба.
Нужно выбрать модель зуба m. Для него существует стандартная шкала.


 -
число зубьев
-
число зубьев
- диаметр (в мм)

Зубья обкатываются, а не проскальзывают, за счет этого уменьшается трение и износ.
Модуль не может быть дробным, на него существуют ГОСТы. Модуль выбирается из соблюдения обеспечения прочности зубьев.
Прочность
 ,
где
,
где
 -
динамический коэффициент(
-
динамический коэффициент(
 );
);
 -
коэффициент перекрытия (
-
коэффициент перекрытия (
 );
);
 -
коэффициент формы зуба (0,12);
-
коэффициент формы зуба (0,12);


Итак,



 берется
предварительно из условия, что диаметры
всех ведущих шестеренок
берется
предварительно из условия, что диаметры
всех ведущих шестеренок
 будут взяты как
будут взяты как



 -
на первой шестеренке( если дробное
число, округляем по правилам округления);
-
на первой шестеренке( если дробное
число, округляем по правилам округления);
 не
допускается маленькое число
не
допускается маленькое число
Если
 ,
необходимо увеличить диаметр. Можно
задаться меньшим модулем и оценить
насколько увеличится
,
необходимо увеличить диаметр. Можно
задаться меньшим модулем и оценить
насколько увеличится







 -
число зацеплений
-
число зацеплений
После того, как редуктор спроектирован делается последняя проверка

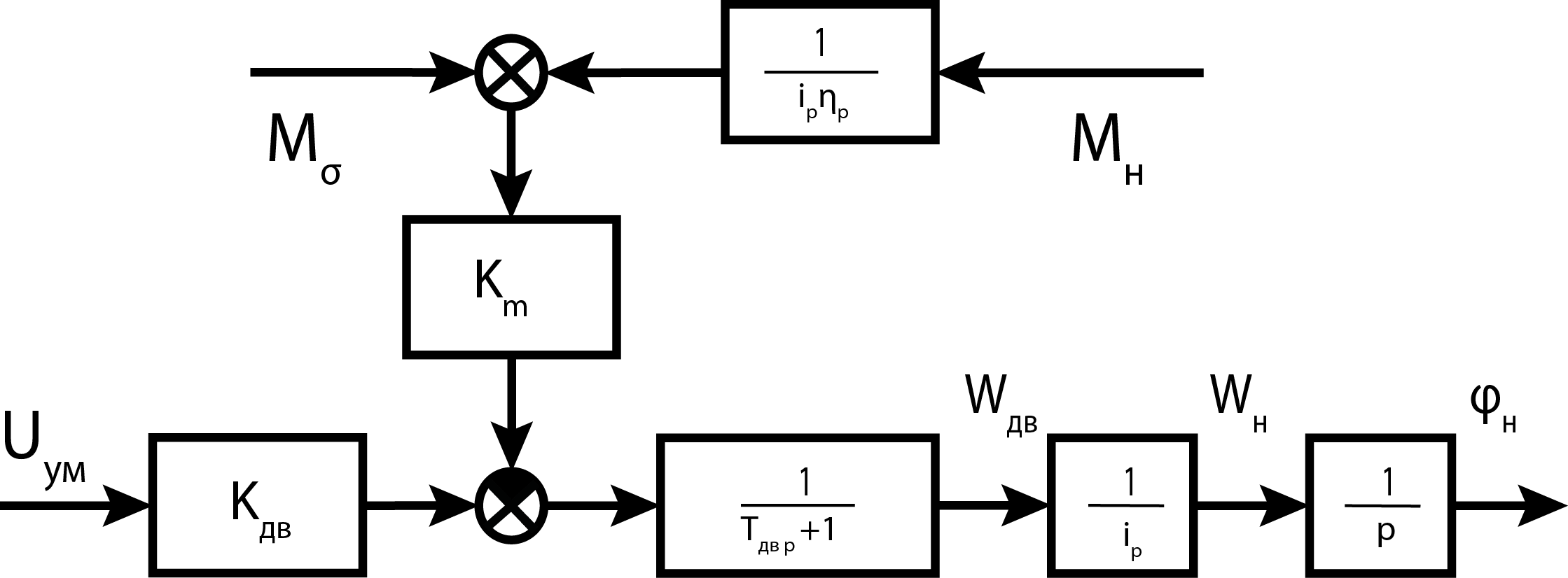
Построение структурной схемы. Расчет передаточной функции двигателя.
На
входе





Разделим на с

После преобразования Лапласа


Лекция №6
Структурную схему для асинхронного двигателя можно посмотреть в лекциях 3 курса.
Уточнение

 ,
где
n – число шестеренок
,
где
n – число шестеренок
Усилитель мощности для двигателя постоянного тока представляет большую проблему. Управление происходит по ротору, что приводит к большим токам, которые необходимо регулировать.
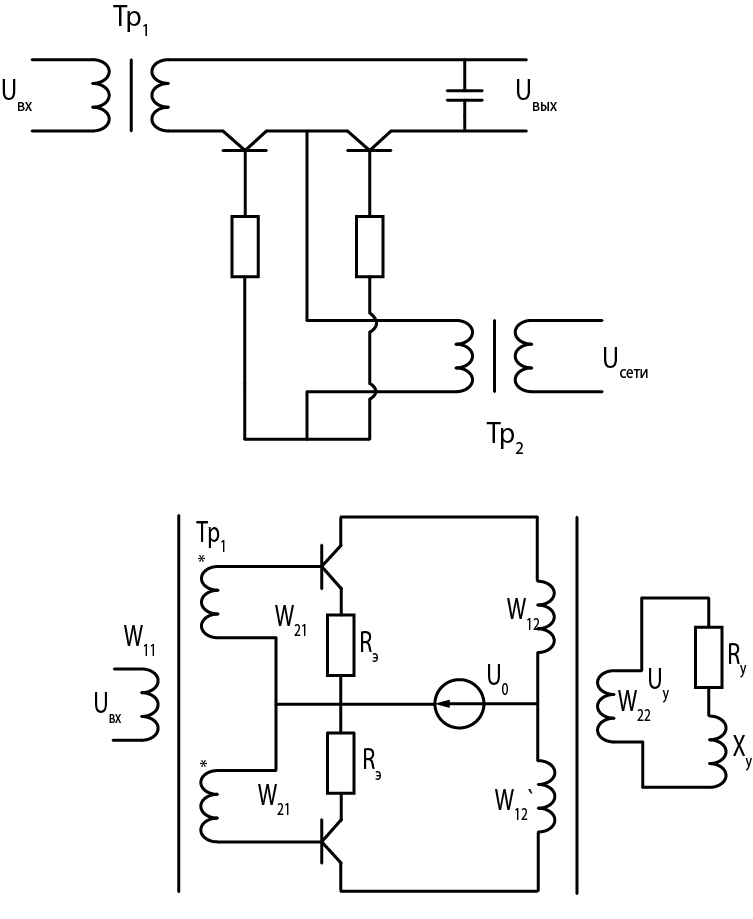
Электромашинный усилитель (эму)
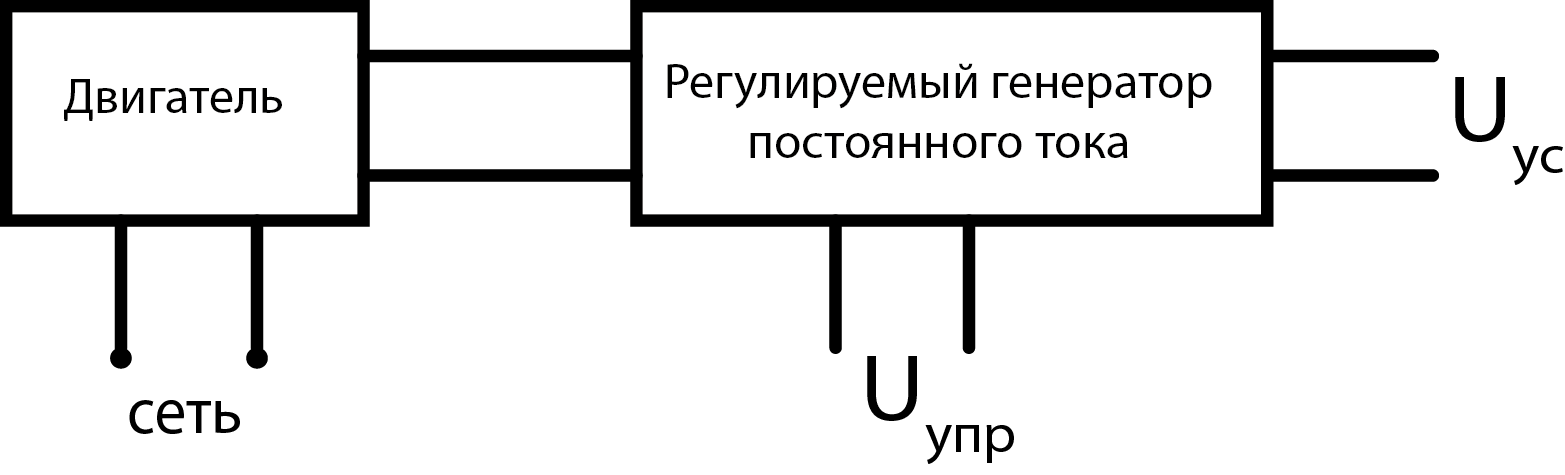
Недостаток ЭМУ – низкий КПД, невысокий ресурс работы
ЭМУ ушли только с появление силовой электроники.
Сейчас используют усилители постоянного тока с широтно-импульсной модуляцией (ШИМ).

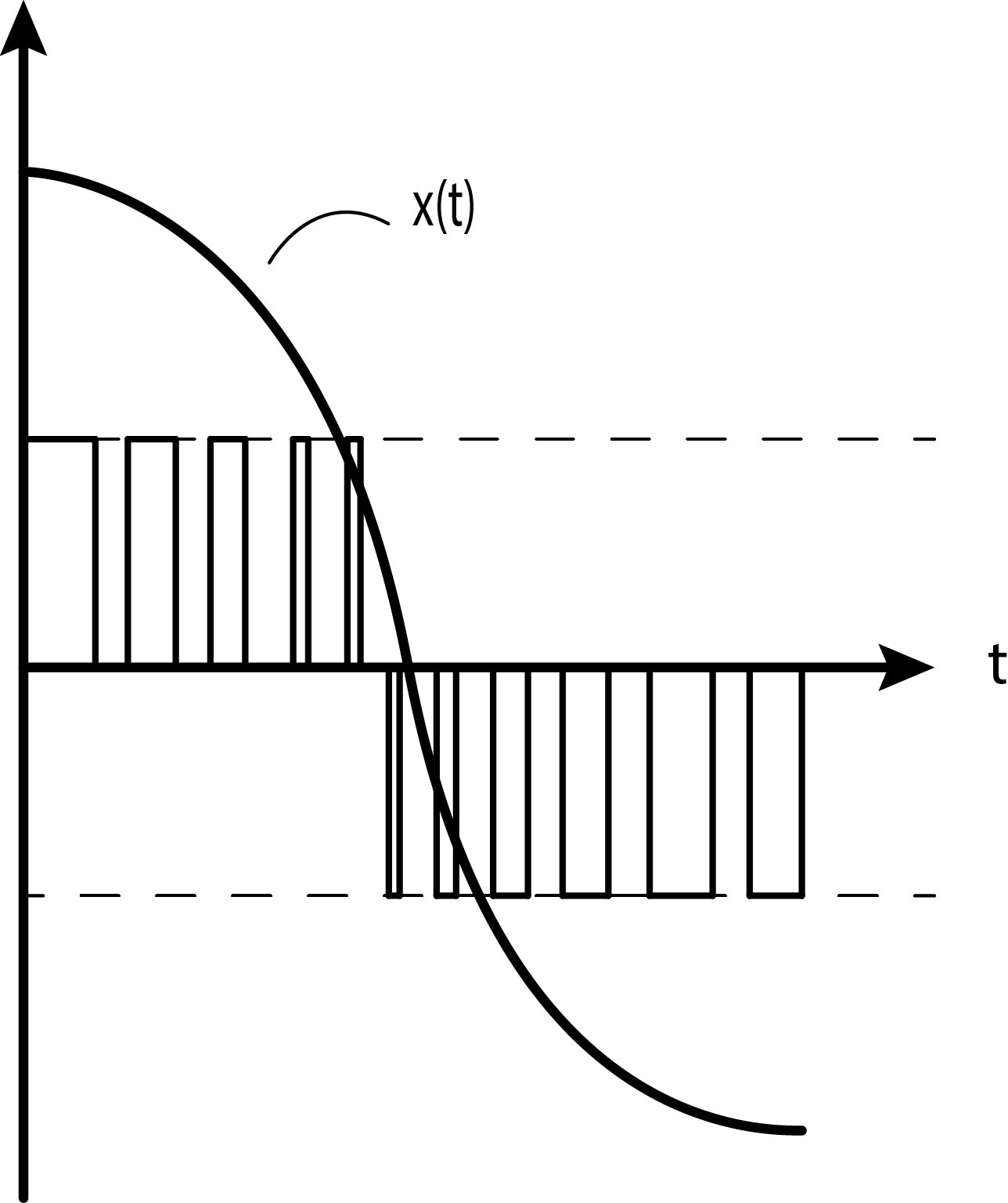
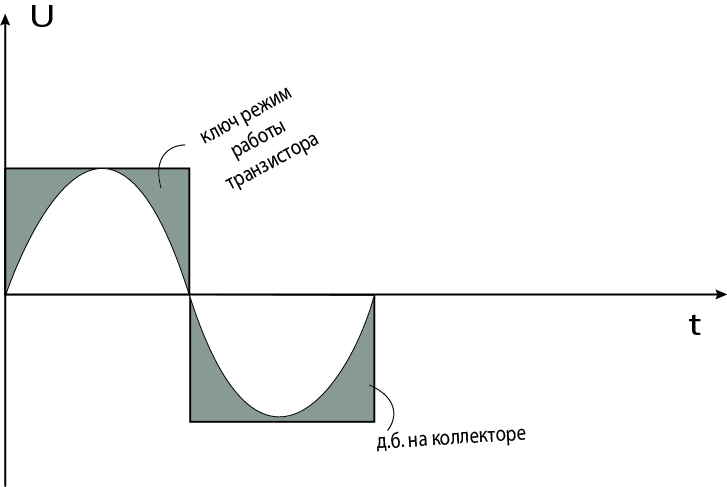
Ширина импульса примерно равна величине сигнала
Этот усилитель на самом деле нелинейный. Делается переход на линейный при большой частоте дискретизации (если частота дискретизации >> частоты среза)
У
нас частота

Если полоса пропускания до 100, тогда импульсностью усилителя можно пренебречь.
Силовая часть усилителя мощности

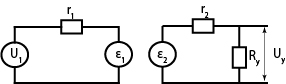
Иначе:

Принцип работы:
При вращении двигателя в одну сторону одновременно открываются транзисторы VT1, VT3, при вращении в другую сторону – транзисторы VT2, VT4.
Исключается одновременное открытие транзисторов VT1 и VT2 или VT1 и VT3.
Диоды VD1 – VD4 нужны для защиты транзистора от пробоя при закрывании.

Возникает ЭДС индукции, ток не может сразу прерваться, он рассасывается через диоды.
В
этой схеме мы выбираем
 ,
транзисторы и диоды.
,
транзисторы и диоды.
У
нас есть
 и
и
 .
.
Потери на транзисторе составляют 10% =>
 ,
,
 (относительная открытость).
(относительная открытость).
Принцип работы схемы управления. Вертикальный принцип управления.
С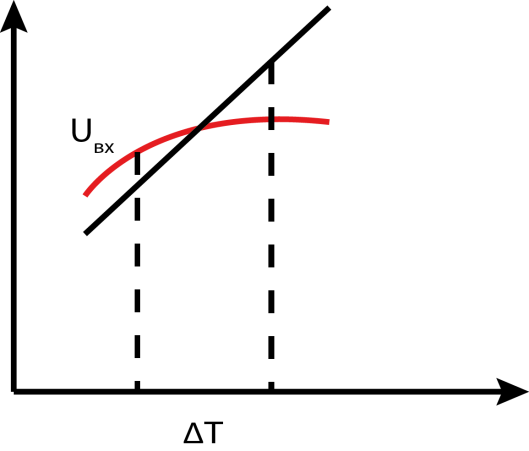 равнение
происходит на компараторе.
равнение
происходит на компараторе.

Оптопара необходима для гальванической развязки управляемой схемы и силовой.
П ри
росте
ри
росте
 ширина
импульсов растет, при уменьшении -
сужается.
ширина
импульсов растет, при уменьшении -
сужается.
Лекция №7

 ,
,
 - вращение в другую сторону
- вращение в другую сторону
 -
переменная
-
переменная
 -
несущая частота
-
несущая частота



Установим класс А



Дано:
 ;
;

 ;
;
 ;
;
 .
.
Выбираем: VT ;
Ишем:
,
 ,
,
 ,
,
 ,
,












- источник постоянного тока