

Лекция №1
Литература
Следящие приводы в 3 томах под ред. Б.К. Чемоданова, М., «МГТУ им. Баумана», 1992 г.
Васильев Д.В. и др., «Проектирование и расчет следящих систем», 1994 г.
Бесекерский В.А., Ахметзанов А.А., Рабинович, Попков С.Л. «Следящие системы».
Обобщенная функциональная схема следящей системы.
Функциональной называется такая схема, в которой каждому элементу структуры соответствует некоторый физический элемент.
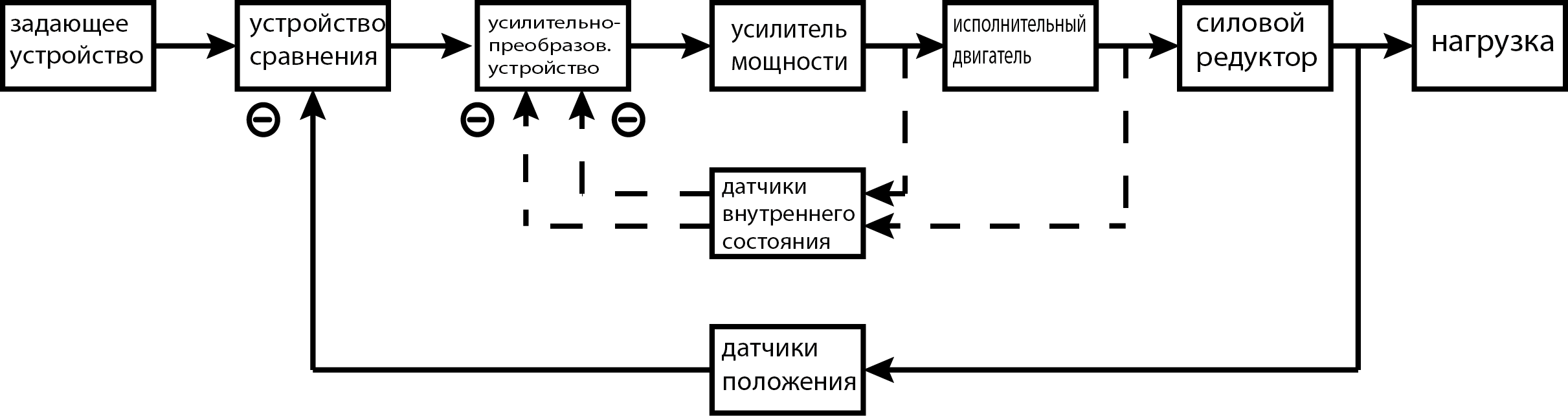 В
курсе проектируется угловая следящая
система, у которой задающее устройство
задает аналоговый сигнал.
В
курсе проектируется угловая следящая
система, у которой задающее устройство
задает аналоговый сигнал.
Классификация следящих систем
По признакам
наземные
корабельные
бортовые
промышленные
По характеру передаваемого сигнала
непрерывные (аналоговые)
модулированные сигналы
импульсные
релейные
цифровые
По принципу действия
1)позиционные
2)скоростные
3)комбинированные
По принципу построения
1)одноканальные
2)многоканальные
По типу исполнительного двигателя
1)с электродвигателем
2)с гидравлическим двигателем
3)с пневматическим двигателем
Лекция №2
О размерностях
напряжение |
[В] |
U |
ток |
[А] |
I |
сопротивление |
[Ом, кОм] |
R |
масса |
[Кг] |
m |
ускорение |
[ |
a |
скорость |
[м/с] |
v |
длина |
[м] |
l |
сила |
[Н]
( |
F |
момент |
[ |
M |
момент инерции |
[ |
J |
мощность |
[Вт] |
P=UI,
P= |
угол |
[рад] |
|
угловая скорость |
[рад/с] |
|
угловое ускорение |
[ |
|
ускорение свободного педения |
[9,81 ] |
g |
 ]
] )
) ]
] ]
]


 ]
]
Техническое задание
Требования на режимы работы вала нагрузки (параметры нагрузки).
Ошибки/погрешности при обработке типовых воздействий.
Качество переходных процессов.
Требования к исполнительному двигателю.
Дополнительные условия.
Рассмотрим подробнее
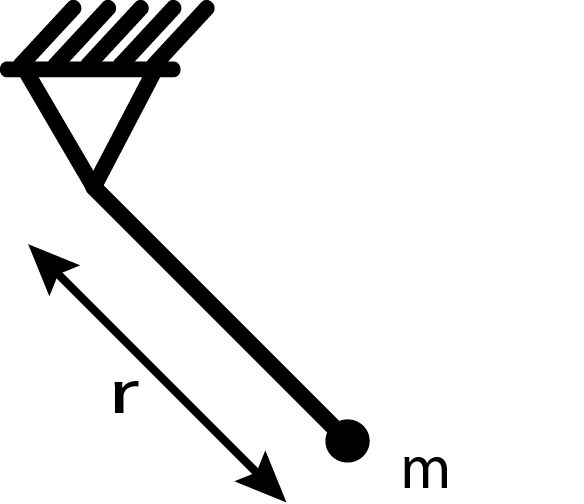
Характеристика
нагрузки задается через
 и
и

 -
момент сил сухого трения
-
момент сил сухого трения



Момент небаланса

Момент вязкого трения

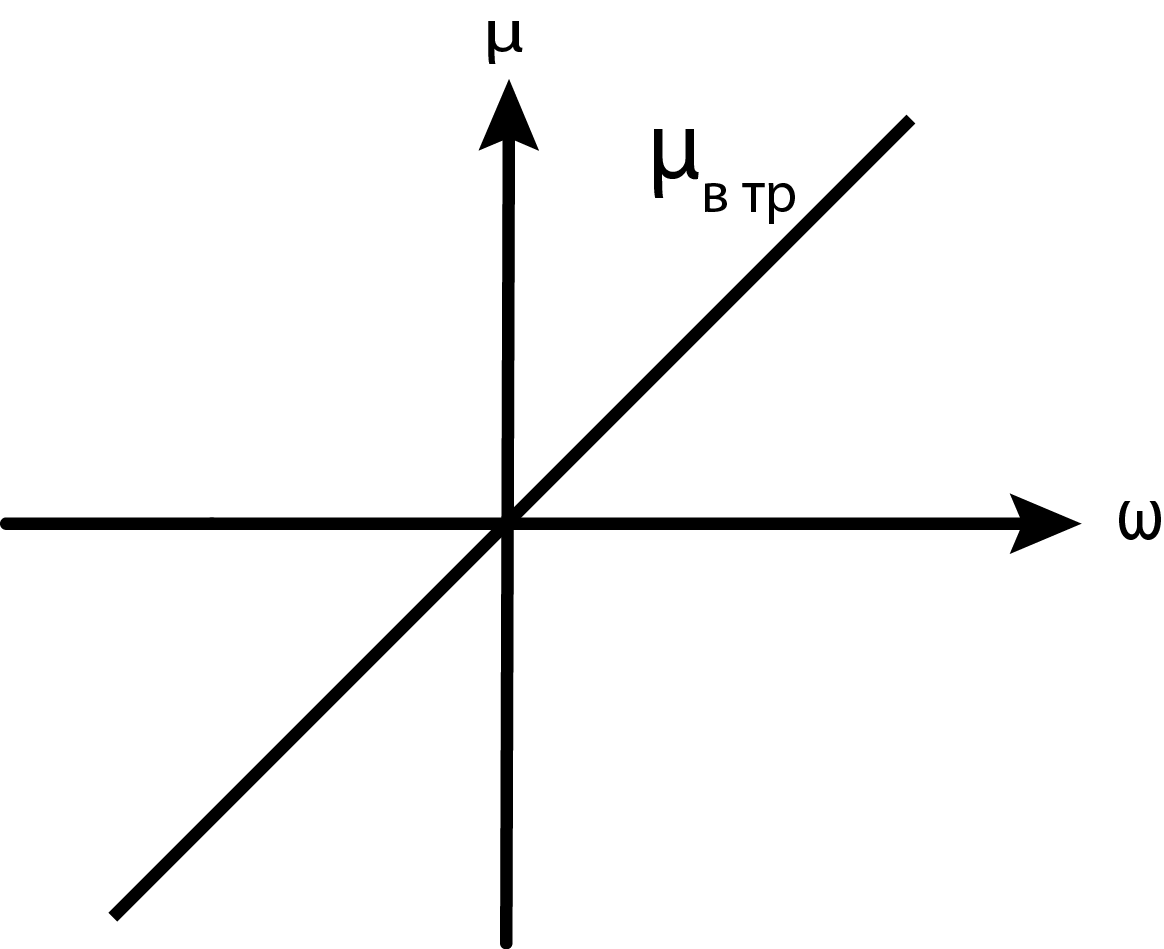
Вентиляционный момент


Для
динамического момента заданы
 и
и

Есть типовые режимы
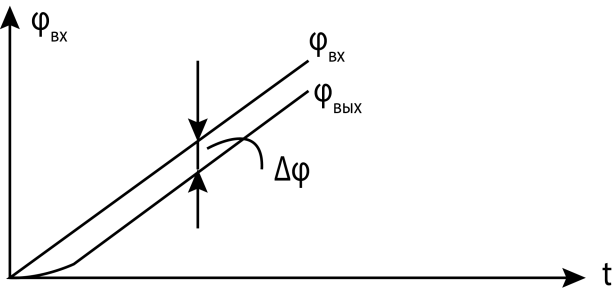
Скачок по углу

Равномерная заводка


Синусоидальная заводка

 и
и
 - параметры эквивалентной синусоиды,
определяются с помощью
и
- параметры эквивалентной синусоиды,
определяются с помощью
и





т.е.

|



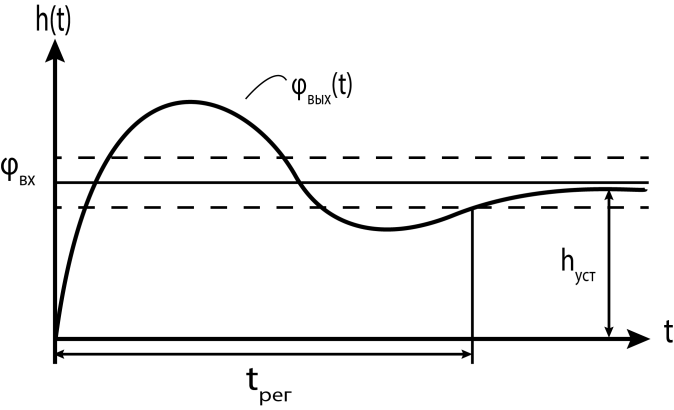

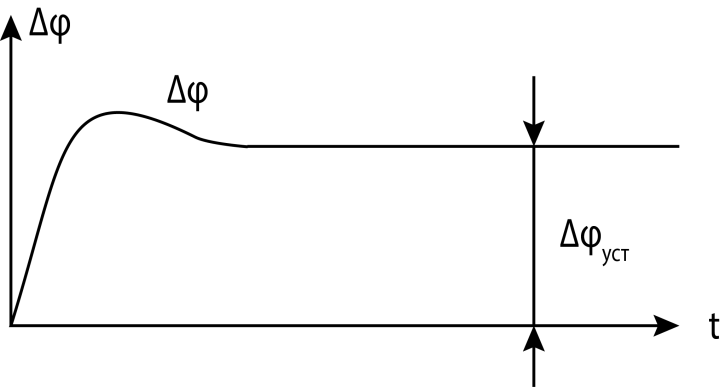
Динамическая ошибка
Здесь речь идет об амплитудном значении ошибки


Проектирование следящей системы. Этапы.

Выбор двигателя и расчет редуктора.
Предварительный выбор двигателя.
Расчет редуктора.
Проверка пригодности двигателя с редуктором.
Расчет усилителя мощности.
Выбор измерительного устройства (класс точности) и оценка передаточной функции разомкнутой системы.
Коррекция системы и расчет усилительно-преобразовательного устройства(УПУ).
Моделирование системы.