

4.5.2.Средства сбора информации
Средства сбора информации – это датчики технологических параметров (первичные преобразователи), которые преобразуют физический параметр (температуру, давление, скорость и др.) в электрический сигнал (иногда в пневматический), пропорциональный по величине измеряемому параметру.
В настоящее время на существующих (построенных давно) объектах установлены датчики с аналоговым или дискретным выходом. Но в 90-х годах стали появляться датчики с цифровым выходом, подключаемые к цифровому каналу связи. Ещё более современные датчики имеют выход на радиоканал.
Датчики устанавливаются либо непосредственно на технологическом оборудовании и трубопроводах, либо в непосредственной близости от оборудования на специальных конструкциях (стендах). В этом случае с измеряемой средой они связаны импульсными трубками.
4.5.3. Средства автоматического управления
Средства автоматического управления – это устройства, которые воспринимают информацию о параметрах технологического процесса, преобразуют ее в цифровой сигнал, обрабатывают эту информацию в соответствии с алгоритмами управления, формируют в цифровом коде управляющий сигнал, преобразуют его в выходной аналоговый, дискретный или импульсный сигнал. В настоящее время, в основном, в больших системах применяются программно-технические комплексы (ПТК). В состав ПТК входят микропроцессорные контроллеры с фирменным программным обеспечением (ФПО). ФПО включает в себя операционную систему и библиотеку алгоритмов, обеспечивающих решение подавляющего большинства задач управления. Контроллеры являются проектно-компонуемым изделием, состоящим из процессорного блока и набора устройств (блоков, модулей), обеспечивающих его связь с объектом. В больших системах контроллеры, как правило, монтируются в шкафы. На рабочей площадке к монтажному полю шкафа подключаются кабели внешних соединений. В малых системах контроллеры в приборном исполнении могут встраиваться в щиты или пульты управления.
4.5.4. Средства воздействия на процесс
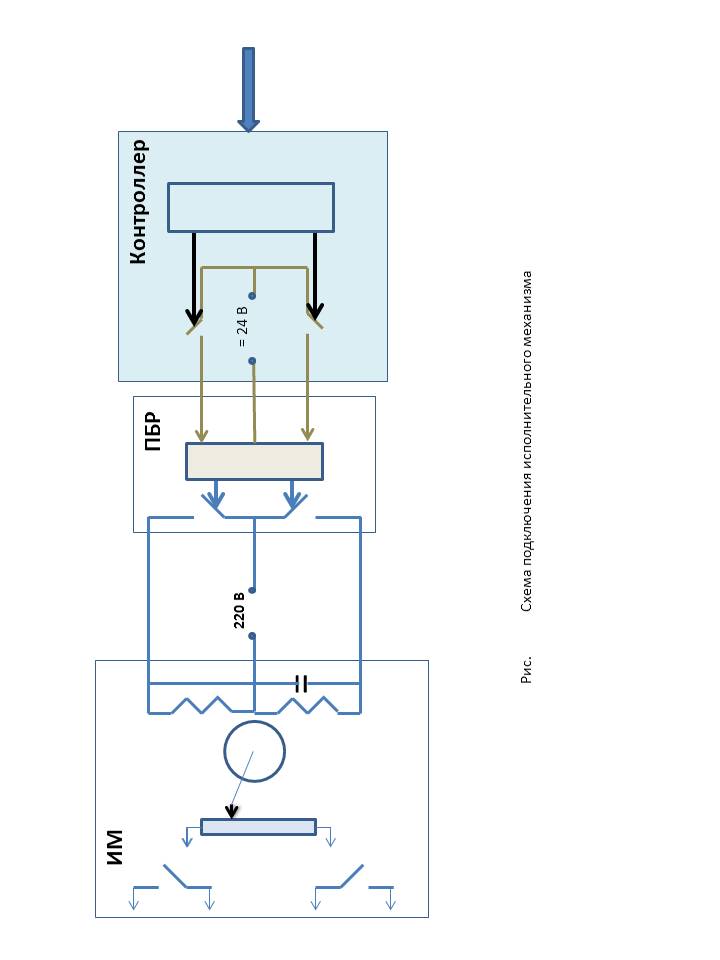
В качестве средств воздействия на процесс применяются исполнительные механизмы (ИМ), управляющие регулирующими органами.
Исполнительный механизм представляет из себя низкооборотный двухфазный электромотор с понижающим редуктором. ИМ бывают однооборотные, многооборотные и прямоходные.
В качестве примера рассмотрим ИМ производства Чебоксарского завода электрических исполнительных механизмов (ЧЗЭИМ).
Однооборотные (или неполноповоротные) электрические исполнительные механизмы и приводы МЭО, МЭОФ, КСАТО (далее – электроприводы) предназначены для передачи крутящего момента арматуре при ее повороте на один оборот или менее (от 0 до 360°).
Механизмы МЭО и МЭОФ предназначены для приведения в действие запорно-регулирующей арматуры в системах автоматического регулирования технологическими процессами, в соответствии с командными сигналами регулирующих и управляющих устройств.
Приводы КСАТО предназначены для приведения в действие запорной арматуры в режиме «Открыть-Закрыть».
Функции механизмов МЭО и МЭОФ
автоматическое, дистанционное или местное (ручное) открытие и закрытие арматуры, останов арматуры в любом промежуточном положении;
указание степени открытия (закрытия) арматуры на шкале местного указателя;
позиционирование рабочего органа арматуры в любом промежуточном положении;
формирование дискретного сигнала о промежуточных и конечных положениях рабочего органа арматуры;
защита от перегрузки по моменту (МЭО(Ф)-1600-04К, МЭО(Ф)-08К, МЭО(Ф)-09К, МЭОФ-10(К)).
формирование.цифровых сигналов состояния концевых и путевых выключателей для передачи по интерфейсу RS-485 (механизмы, оснащенные блоком датчиков БД-1, БД-2)
дискретного состояния моментных выключателей открытия и закрытия для передачи по интерфейсу RS-485 (МЭО(Ф)-08К, МЭО(Ф)-09К, МЭОФ-10(К))
формирование цифровых сигналов состояния моментных выключателей открытия и закрытия, сигнала крутящего момента для передачи по интерфейсу RS-485 (МЭО(Ф)-08К, МЭО(Ф)-09К, МЭОФ-10(К))
Функции приводов КСАТО, работающих режиме "Открыть-Закрыть":
Дистанционное или ручное открытие и закрытие арматуры;
Дистанционный останов арматуры в любом промежуточном положении;
Указание степени открытия (закрытия) арматуры на шкале местного указателя;
Защита от перегрузки по моменту.
Схема подключения ИМ к контроллеру представлена на Рис.
Интеллектуальные (МЭОФ, КИМ1)
Контроллер исполнительного механизма КИМ1 - электронный блок, благодаря которому серийные и вновь разрабатываемые электропроводы приобретают новые качества, становятся интеллектуальными. КИМ1 имеет установочные и габаритные размеры серийного датчика положения и устанавливается в электропривод на его место.
Состав интеллектуального электропривода:
контроллер исполнительного механизма КИМ-1
электродвигатель
редуктор
привод ручной
фланец (в электроприводах МЭОФ)
Функциональные особенности интеллектуальных электроприводов, оснащенных КИМ1:
Управление электроприводом:
дискретными сигналами
по сети RS-485, протокол MODBUS
аналоговым сигналом
от автономного инфракрасного пульта
от пульта местного управления
Дистанционная настройка параметров:
от автономного инфракрасного пульта
по сети RS-485
Различные виды защит:
Установка в заранее заданное положение по дискретному или сетевому сигналу "Авария"
Адаптация при позиционировании. КИМ1 при позиционировании заранее отключает двигатель, учитывая инерцию электропривода. Величина ошибки постоянно анализируется, чтобы корректировать время упреждения
Контроль превышения момента на выходном валу электропривода (при наличии датчика момента)
Формирование обобщенного сигнала "Неисправность"
Батарея резервного питания, обеспечивающая работу датчиков и индикации в течение 24 часов
Электронная индикация наличия движения, конечных по-ложений, превышения момента, неисправности, необходимости замены батареи
Механический указатель текущего положения рабочего органа арматуры
Сигнализация о достижении рабочим органом арматуры конечных и промежуточных положений
Сигнализация о превышении момента
Установка рабочего органа арматуры в положение «Закрыто» и «Открыто» с уплотнением или без него
Управление противоконденсатным подогревателем электронного отсека в зависимости от температуры
Диапазон рабочих температур от -40 до +60° С
КИМ1 имеет несколько исполнений по способу управления:
дискретное управление. Управление командами ОТКРЫТЬ, ЗАКРЫТЬ, подаваемыми на дискретные входы
аналоговое управление. Управление аналоговым сигналом (0..5мА,0..20мА,4..20мА,0..10В)
управление по сети RS-485 с протоколом MODBUS
КИМ1 имеет исполнения со встроенным пускателем или без него, но с возможностью управления внешним пускателем. Исполнения КИМ1 без пускателя называются интеллектуальными датчиками.