

2.1. Закон всемирного тяготения. Сила тяготения, сила тяжести, вес тела
Ньютон установил закон всемирного тяготения – материальные точки притягиваются друг друга с силой F пропорциональной их массам m1 и m2 и обратно пропорциональной квадрату расстояния r между ними:
![]() . (2.1)
. (2.1)
Коэффициент G = 6,67 × 10-11Н·м2/кг2 был определен экспериментально и назван гравитационной постоянной.
Силу, с которой Земля притягивает тела, находящиеся на поверхности Земли или близи ее поверхности, определяющую выражением
![]() ;
;
![]() , (2.2)
, (2.2)
называют силой тяжести. В формуле (2.2) m – масса тела, М – масса Земли, R – радиус Земли, g – ускорение свободного падения.
Сила, с которой тело действует на подвес или опору, называют весом тела.
2.2. Неинерциальные системы отсчета. Силы инерции
Законы Ньютона выполняются только в
инерциальных системах отсчета. Системы
отсчета, которые движутся ускоренно
относительно инерциальных систем,
называют неинерциальными. В
неинерциальной системе отсчета
ускорение тела
![]() отличается
от ускорения
в
инерциальной системе на величину
отличается
от ускорения
в
инерциальной системе на величину
![]() :
:
–
![]() =
.
=
.
Пусть результирующая всех сил,
обусловленных действием на данное тело
со стороны других тел, равна
![]() ,
тогда согласно второму закону Ньютона
ускорение тела относительно любой
инерциальной системы отсчета равно
,
тогда согласно второму закону Ньютона
ускорение тела относительно любой
инерциальной системы отсчета равно
![]() .
.
Ускорение же тела относительно неинерциальной системы можно представить в виде
=
–
=
![]() .
.
Отсюда следует, что при = 0 тело будет двигаться по отношению к неинерциальной системе отсчета с ускорением , т. е. так, как если бы на него действовала сила, равная – m .
Сказанное означает, что при описании
движения в неинерциальных системах
можно пользоваться уравнениями движения
Ньютона, если наряду с силами воздействия
тел друг на друга, учитывать так называемые
силы инерции![]() .
Силы инерции следует полагать равными
произведению массы тела на взятую с
обратным знаком разность его ускорений
по отношению к инерциальной и неинерциальной
систем отсчета:
.
Силы инерции следует полагать равными
произведению массы тела на взятую с
обратным знаком разность его ускорений
по отношению к инерциальной и неинерциальной
систем отсчета:
![]() .
.
Следовательно, уравнение движения в неинерциальной системе отсчета будет иметь вид:
![]() . (2.3)
. (2.3)
Поясним наше утверждение примерами.
1
Рис. 2.1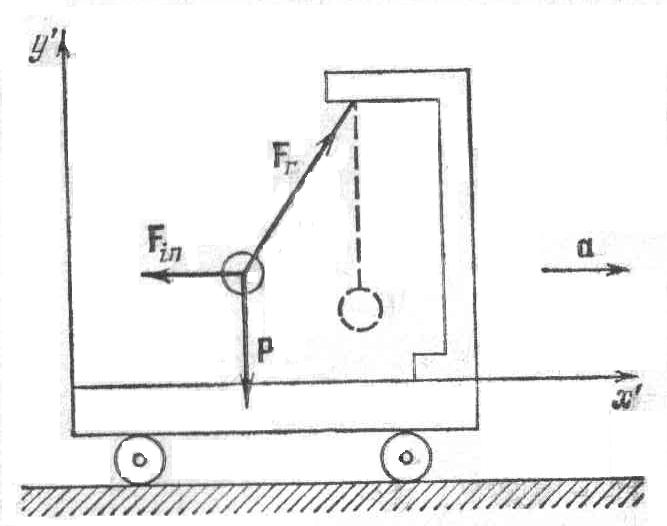
![]() .
Нить отклонится от вертикали на такой
угол, чтобы результирующая сил
.
Нить отклонится от вертикали на такой
угол, чтобы результирующая сил
![]() и
и
![]() сообщала шарику ускорение
.
Относительно системы отсчета, связанной
с тележкой, шарик покоится, несмотря на
то, что результирующая сил
сообщала шарику ускорение
.
Относительно системы отсчета, связанной
с тележкой, шарик покоится, несмотря на
то, что результирующая сил
![]() и
отлична
от нуля. Отсутствие ускорения шарика
по отношению к этой
и
отлична
от нуля. Отсутствие ускорения шарика
по отношению к этой
системе отсчета можно формально
объяснить тем, что, кроме сил
и
на
шарик действует и сила инерции
![]() .
.
Следовательно, в неинерциальной системе отсчета при ускоренном прямолинейном движении этой системы на тела неподвижные относительно этой системы действует сила инерции
![]() . (2.4)
. (2.4)
2
Рис. 2.2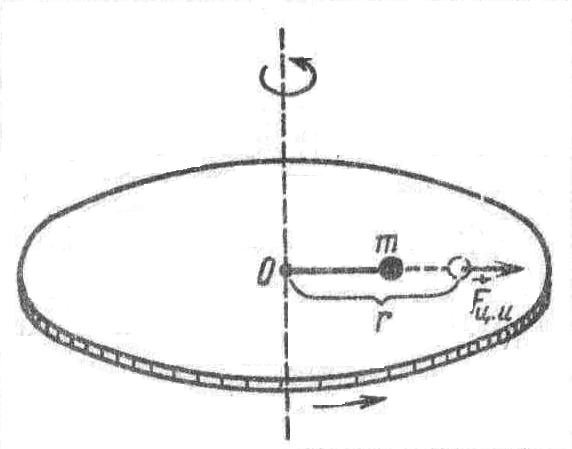
![]() (и, следовательно, превратится в
неинерциальную систему отсчета), то
благодаря трению тело тоже будет
вовлечено во вращение. Вместе с тем оно
будет перемещаться в радиальном
направлении от центра платформы до тех
пор, пока возвращающая сила упругости
не остановит это перемещение. Тогда
тело начнет вращаться на расстоянии r
от центра О. С точки зрения
наблюдателя, связанного с платформой,
перемещение
(и, следовательно, превратится в
неинерциальную систему отсчета), то
благодаря трению тело тоже будет
вовлечено во вращение. Вместе с тем оно
будет перемещаться в радиальном
направлении от центра платформы до тех
пор, пока возвращающая сила упругости
не остановит это перемещение. Тогда
тело начнет вращаться на расстоянии r
от центра О. С точки зрения
наблюдателя, связанного с платформой,
перемещение
шара относительно нее обусловлено
некоторой силой
![]() .
Это сила инерции, поскольку она не
вызвана действием на шар других
определенных сил; ее называют центробежной
силой инерции. Очевидно, что
центробежная сила инерции равна по
модулю и противоположна по направлению
центростремительной силе, действующей
на тело.
.
Это сила инерции, поскольку она не
вызвана действием на шар других
определенных сил; ее называют центробежной
силой инерции. Очевидно, что
центробежная сила инерции равна по
модулю и противоположна по направлению
центростремительной силе, действующей
на тело.
Поэтому
![]() . (2.5)
. (2.5)