

1.2. Кинематика вращательного движения
Пусть
м. т. движется со скоростью
по
окружности радиуса r
вокруг неподвижной оси вращения
(рис.1.4а). Положение точки
на окружности определяет радиус-вектор
,
а вектор его элементарного приращения
![]() направлен по касательной к окружности.
Введем понятие вектора
элементарного углового перемещения
направлен по касательной к окружности.
Введем понятие вектора
элементарного углового перемещения
![]() :
он равен по модулю углу элементарного
поворота dφ,
направлен по оси вращения и связан с
направлением вращения правилом правого
буравчика, а именно: направление вращения
буравчика должно совпадать с направлением
вращения материальной точки, тогда
поступательное движение буравчика
определяет направление вектора
(рис.
1.4а).
:
он равен по модулю углу элементарного
поворота dφ,
направлен по оси вращения и связан с
направлением вращения правилом правого
буравчика, а именно: направление вращения
буравчика должно совпадать с направлением
вращения материальной точки, тогда
поступательное движение буравчика
определяет направление вектора
(рис.
1.4а).
Рис. 1.4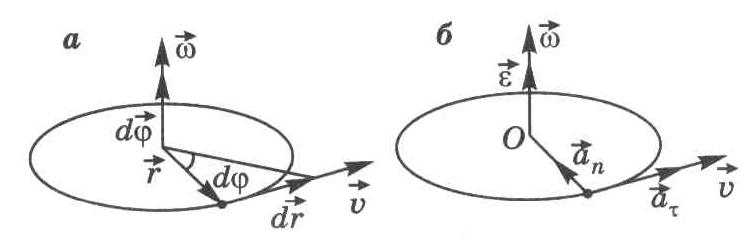
Быстроту вращения м. т. характеризует
угловая скорость
![]() ,
равная первой производной от вектора
углового перемещения
,
равная первой производной от вектора
углового перемещения
![]() по
времени t:
по
времени t:
![]() (1.6)
(1.6)
Направление вектора угловой скорости и вектора элементарного углового перемещения совпадают.
Быстроту изменения угловой скорости
характеризует вектор углового
ускорения
![]() ,
равный первой производной от угловой
скорости
по времени t:
,
равный первой производной от угловой
скорости
по времени t:
![]() (1.7)
(1.7)
Кроме перечисленных выше величин, для описания вращательного движения тела используют частоту вращения n, определяемую как число оборотов, совершенных телом за единицу времени, и период обращения Т, как время одного полного оборота. Справедлива следующая взаимосвязь ω, n и Т:
ω = 2πn = 2π/Т. (1.8)
Установим взаимосвязь линейных
(
,![]() )
и угловых (
,
)
характеристик при вращательном движении.
)
и угловых (
,
)
характеристик при вращательном движении.
Пользуясь определением векторного произведения двух векторов (см. Прил. 1) и рис. 1.4а, можно записать
![]() (1.9)
(1.9)
Выражение (1.9) позволяет получить следующие формулы взаимосвязи линейных и угловых характеристик:
для скоростей и
![]()
![]() ;
v
= ωr
. (1.10)
;
v
= ωr
. (1.10)
для ускорений , ,
![]() ;
;
![]() ;
aτ
=
εr
, (1.11)
;
aτ
=
εr
, (1.11)
![]() ,
an
= ων
=ν2/r
= ω2r. (1.12)
,
an
= ων
=ν2/r
= ω2r. (1.12)
1.3. Динамика движения материальной точки. Законы Ньютона
Динамика изучает движение тел в связи
с теми причинами (взаимодействиями
между телами), которые обуславливают
тот или иной характер движения.
Механическое взаимодействие тела с
другими телами описывают с помощью
понятия силы
![]() ,
которая определяется как векторная
величина, характеризующая механическое
взаимодействие данного тела с другими
телами, приводящая к их деформации или
к возникновению ускорения.
,
которая определяется как векторная
величина, характеризующая механическое
взаимодействие данного тела с другими
телами, приводящая к их деформации или
к возникновению ускорения.
Все тела изменяют свою скорость не мгновенно, а постепенно при их взаимодействии с другими телами, то есть обладают инертностью. Количественной характеристикой инертности тела является его масса m. Она определяется как мера инертности тела при его прямолинейном движении.
В основе классической механики движения материальной точки лежат три закона Ньютона, являющиеся обобщением опытных фактов.
1 закон Ньютона рассматривает движение тела в отсутствии его взаимодействия с другими телами. Тело покоится или движется равномерно и прямолинейно, если на тело не действуют другие тела или их действие скомпенсировано.
Оказывается, что законы Ньютона выполняется не во всех системах отсчета, а только в инерциальных. Поэтому среди всех систем отсчета выделяют инерциальные системы отсчет (ИСО), как системы отсчета, в которых выполняются все три закона Ньютона.
ИСО в природе не существует, так как тела отсчета либо вращаются, либо движутся прямолинейно с ускорением. Наиболее близкой к ИСО можно считать систему отсчета связанную с Солнцем. Для многих физических явлений систему отсчета, связанную с Землей, также можно считать ИСО. Системы отсчета, которые движутся прямолинейно и равномерно относительно инерциальных систем, так же являются инерциальными системами.
Для формулировки второго закона Ньютон
ввел понятие импульса тела
![]() как
векторную физическую величину,
характеризующую его прямолинейное
движение и равную произведению массы
тела на его скорость:
как
векторную физическую величину,
характеризующую его прямолинейное
движение и равную произведению массы
тела на его скорость:
![]() . (1.13)
. (1.13)
Согласно второго закона
Ньютона первая производная от импульса
![]() тела по времени t
равна векторной сумме сил, действующих
на тело:
тела по времени t
равна векторной сумме сил, действующих
на тело:
![]() .
(1.14)
.
(1.14)
Если масса тела не изменяется от времени, то тогда выражение (1.14) можно записать, вводя в него ускорение тела:
![]() , (1.15)
, (1.15)
и сформулировать второй закон Ньютона следующим образом: произведение массы тела на его ускорение равно векторной сумме сил, действующих на тело.
Третий закон Ньютона устанавливает дополнительные связи между силами, возникающими при взаимодействии тел. Согласно этому закону силы, действующие между двумя талами равны по модулю и противоположны по направлению:
![]() . (1.16)
. (1.16)
Лекция 2