

51. Тензодатчики: схема включения, вывод формулы чувствительности.
Разновидность реостатного датчика – тензодатчик. Применяется дл контроля механических деформаций. В основу работы положен тензоэффект, который заключается в изменении сопротивления проводника под действием механического напряжения и деформации. Представляет собой тонкую зигзагоуложенную проволоку (2) диаметром 0,02-0,05 мм из константана с выводами (3) и приклеенную к подножке (1). Приклеивается на поверхность исследуемой детали. При деформации датчик деформируется и изменяется сопротивление.
Если элемент датчика включить в диод из плеч мостовой схемы, то изменение его сопротивления вызовет разбаланс моста.
Измерительный элемент ИЭ фиксирует ток небаланса. Для компенсации температурной погрешности в другое плечо мостовой схемы включен идентичный тензодатчик, сопротивление которого неизменно.
Коэффициент тензочувствительности - отношение относительного изменения сопротивления к относительной деформации проволоки:
Применяют цепи с дифференцированным включением датчиков, в котором один тензодатчик испытывает деформацию растяжения, а другой – сжатия. Исключается температурная погрешность и вдвое увеличивается чувствительность.
52. Индуктивный и индукционный датчики: принцип действия, область применения, отличия, схемы включения.
Индуктивные датчики – в них изменяющимся параметром является индуктивное сопротивление катушки, включенное в цепь переменного тока.
 ,
где
,
где
-величина зазора,
S – площадь зазора,
W – число витков.
Индукционные датчики – если изменяется потокосцепление, связанное с проводником или катушкой, то в них возникает ЭДС. Это происходит при движении проводника в магнитном поле или при движении магнитного поля, пересекающего неподвижный проводник. ЭДС возникает при изменении магнитной проводимости потокосцепления.
Индукционные датчики используют как датчики скорости. Выходной сигнал снимается с обмотки, в которой наводится ЭДС.
![]() ,
где
,
где
В – индукция, создаваемая в зазоре кольцевым постоянным магнитом
l – длина витка перемещающейся измерений обмоткой
W – число витков обмотки
V – скорость перемещения измерений обмотки.
Для получения сигнала пропорционального перемещения сигнал с обмотки интегрируется.
53. Гистерезисные муфты: устройство, принцип действия, механические характеристики.
Существуют два вида исполнения:
магнитное поле создается обмоткой.
магнитное поле создается постоянными магнитами.
В муфте постоянные магниты (2 исполнение) с полюсными наконечниками укреплены в магнитопроводе индуктора, связанного с ведущим валом. На ось ведомого вала насажен ротор, состоящий из немагнитного или магнитомягкого материала и колец активного слоя. Кольца активного слоя изготовлены из материала с довольно широкой петлей гистерезиса, имеющей высокие значения остаточной индукции и коэрцитивной силы. Шихтованная структура активного слоя позволяет уменьшить вихревые токи и асинхронный вращающий момент. Пусть ротор заторможен, а индуктор приводным двигателем с угловой скоростью w1. Взаимодействие поля постоянных магнитов индуктора с полем, созданным активным слоем, создает на роторе гистерезисный момент Мг. Если ведомый вал не заторможен, то под действием гистерезисного момента он начинает вращаться с угловой скоростью w2. Момент на ведомом валу не зависит от частоты его вращения. Если Мн≤Мг, то скорость w2 ведомого вала будет увеличится, пока не станет равной w1. При Мн=Мг вектор вращающегося поля индуктора будет опережать вектор активного слоя на угол Θ, значение которого зависит от свойств материала активного гистерезисного слоя. При Мн>Мг муфта переходит в асинхронный режим, когда частота вращения муфты меньше частоты вращения индуктора.
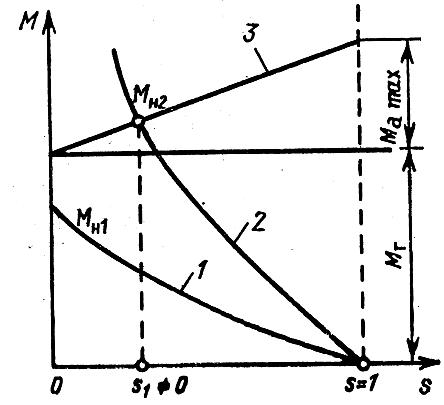
Пока Мн≤Мг, ведомый вал вращается с синхронной скоростью (S=0) кривая 1.Если Мн>Мг, то ведомый вал вращается со скольжением кривая 2. Однако момент передаваемый муфтой остается постоянным, равным Мг. Если активный слой выполнен в виде литого цилиндра, то за счет вихревых токов, кроме гистерезисного момента появляется асинхронный момент прямая 3. В этом режиме скольжение S≠0, угловая скорость w2<w1, ротор отстает от вращающего индуктора и в нем создается дополнительный момент, как в асинхронном двигателе.