

29. Допустима та баєсівська границі у зр зі скінченними просторами
Розглядається спеціальна задача рішення, в якій простір Ω складається з k (k>1) точок, а простір рішень D – з m точок (m>1).
Тобто, D, Ω -- скінченні.
Всі змішані рішення задаються ймовірностями p1, p2… pm. Для задання будь-якого рішення /*(і чистого і рандомізованого )*/ нам достатньо задати ймовірності на кожному з чистих рішеннях, що призводять до такого рішення.
Тоді зрозуміло, що вектор втрат задається так: (позначимо через y(d)):
y(d) = [L(w(1,d),… , L(w(,d)]
Рішення d є M називається допустимим, якщо не існує іншого рішення d’, при якому L(wi,d’) =< L(wi,d),
при i=1,…,k, і що L(wi,d’) < L(wi,d) хоча б для одного значення і.
Припустима границя множини G:
Гп(G)={x є G : не існує y є G, такий що, для всіх i, yi =< xi i = 1..k.,
Існує j, yj < xj, j=1..k}
Баєсівська границя множини G:
Гб (G) = {x є G : не існує y, є G, для всіх i, yi<xi}

Теорема:
Вектор y(d*) належить баєсівській границі тоді і тільки тоді,
коли існує розподіл ξ параметра W, при якому d* -- баєсівське рішення.
Доведення:
1) припустимо, що d* -- баєсівське рішення при розподілі ξ ={ξ1, … ξk}. І нехай y(d*)=(y*1,… y*k). І для всіх інших d, y(d)=(y1,… yk). Тоді ξy(d*) =< ξy, оскільки ξk і >= 0 при i=1..k, і ξi > 0 хоча б для одного значення i. Нерівність yi < y*i при будь-якому і неможлива /*(бо y* -- баєсівська)*/, тому y(d*) лежить на баєсівській границі G.
2) Тепер нехай y(d*) – точка баєсівської границі. Тоді, а точці y(d*) існує опорна гіперплощина a’x=c така, що всі компоненти вектора a=(a1… aі)’ невід’ємні. Поділивши всі компоненти вектора а і сталу с на суму aі, отримаємо те ж рівняння гіперплощини, але всі компоненти вектора a будуть невід’ємні і в сумі дорівнюватимуть 1. інакше кажучи, його можна буде взяти за ймовірнісний розподіл параметра Ω. З означення опорної гіперплощини, а’у(d*)=c, a’ y>=c для всіх y є G. із цих співвідношень видно, що y(d*) дає найменше значення a’y серед всіх векторів y є G. Отже, d* -- баєсівське рішення а.
Важливий висновок з означень баєсівської/ допустимої границі –
допустима границя – це підмножина баєсівської границі. /*всі допустимі рішення – є баєсівським.*/
30. Два типи спостережень (експериментів) у задачах прийняття рішень (ЗПР).
Існує два типи спостережень у ЗПР :
1. Експеремент проводиться перед тим як прийняти рішення. Досліджуються параметри середовища(параметри що впливають на дії).
y = Function(θ,Ω)
y - результат
експеременту для певного параметра.
![]() .
Де Ω - множина параметрів. ξ - похибка
приладу. Сприймайте функцію Function як
функцію-експеремент.
.
Де Ω - множина параметрів. ξ - похибка
приладу. Сприймайте функцію Function як
функцію-експеремент.
2. Експеремент проводиться після приняття рішення. Досліджуються наслідки минулого рішення.
y = Function(c,Ω)
![]() -
наслідок з множини наслідків.
-
наслідок з множини наслідків.
У другому типі експеременту наявна дінаміка, тому що поточне рішення приймається спираючись на результат минулого. Тобто дінамічно.
Загальним
ризиком від спостереження X
і прийняття вирішальної функції
 називається сума ризику
називається сума ризику
 й середньої ціни спостереження
й середньої ціни спостереження
 .
Статистик
повинен вибрати спостереження X
з деякого класу доступних спостереженню
випадкових величин і відповідну
байєсівскую вирішальну функцію
,
яка мінімізує загальний ризик.
Виражаючи загальний ризик у вигляді
суми ризику вирішальної функції
й середньої ціни спостереження, ми
неявно використаємо припущення про
аддитивності корисностей статистика.
.
Статистик
повинен вибрати спостереження X
з деякого класу доступних спостереженню
випадкових величин і відповідну
байєсівскую вирішальну функцію
,
яка мінімізує загальний ризик.
Виражаючи загальний ризик у вигляді
суми ризику вирішальної функції
й середньої ціни спостереження, ми
неявно використаємо припущення про
аддитивності корисностей статистика.
Розглянемо
приклад. Припустимо тепер, що ціна
спостереження випадкової величини X
дорівнює
 ,
,
 .
Статистик може або прийняти рішення,
не спостерігаючи X, або заплатити суму
й спостерігати X перед ухваленням
рішення. При заданому апріорному
розподілі
.
Статистик може або прийняти рішення,
не спостерігаючи X, або заплатити суму
й спостерігати X перед ухваленням
рішення. При заданому апріорному
розподілі
 запитується, на яку суму с
варто погоджуватися статистику?
запитується, на яку суму с
варто погоджуватися статистику?
Для
рішення цього завдання треба порівняти
мінімальне значення ризику
 без обліку ціни спостереження с,
що може бути отримане на основі
спостереження X,
з мінімальним ризиком
без обліку ціни спостереження с,
що може бути отримане на основі
спостереження X,
з мінімальним ризиком
 ,
що відповідає байєсівскому рішенню при
відсутності спостережень. Функція
,
що відповідає байєсівскому рішенню при
відсутності спостережень. Функція
 вже знайдена. Функція
вже знайдена. Функція
 має вигляд
має вигляд
 (2)
(2)
Графіки
функцій
і
зображені на мал. 8.7. Із цього малюнка
видно, що
 ,
якщо
,
якщо
 або
або
 .
Отже, при значенні апріорної ймовірності
,
що лежить в одному із цих інтервалів,
статистик може досягти й без спостереження
X
того ж значення ризику, що й при
спостереженні X
.
Отже, при значенні апріорної ймовірності
,
що лежить в одному із цих інтервалів,
статистик може досягти й без спостереження
X
того ж значення ризику, що й при
спостереженні X
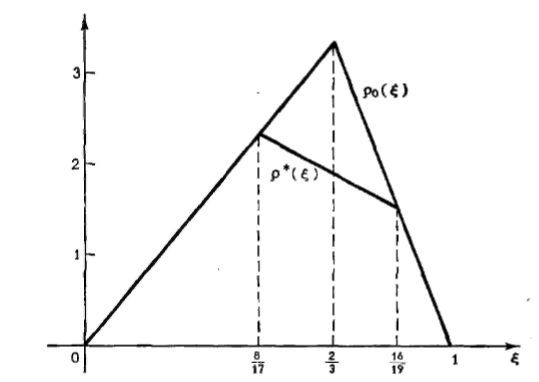
Рис. 8.7. Ризики та із приклада 1.
Якщо
ж
 ,
то
,
то
 за можливість спостереження величини
X
перед ухваленням рішення статистику
треба погоджуватися на будь-яку ціну
,
таку, що
за можливість спостереження величини
X
перед ухваленням рішення статистику
треба погоджуватися на будь-яку ціну
,
таку, що
 ,
Різницю між ризиками
,
Різницю між ризиками
 максимальна для
максимальна для
 ,
де вона дорівнює
,
де вона дорівнює
 .
.
У
багатьох статистичних задачах рішення
спостереження випадкової величини X
пов'язане з певними витратами, які
повинні враховуватися статистиком при
розрахунку ризику від прийняття
вирішальної функції, що використає
результати спостереження X.
Ця обставина грає особливо важливу роль
у випадку, коли статистику треба вирішити,
яку з декількох випадкових величин
краще спостерігати, або вирішити, чи
робити спостереження взагалі. Нехай
 позначає ціну спостереження значення
х
величини X,
якщо
позначає ціну спостереження значення
х
величини X,
якщо
 . Тоді, якщо
є о. в. п. випадкової величини W,
то середня ціна спостереження дорівнює
. Тоді, якщо
є о. в. п. випадкової величини W,
то середня ціна спостереження дорівнює

31.
32. Побудова байєсівських вирішуючих функцій нормальним методом.
Апріорний розподіл - розподіл на Ω, який відомо до експерименту.
Апостеріорний розподіл - умовний розподіл на Ω за умови, що ми спостерігали .
Апостеріорний розподіл дає нам додаткову інформацію про параметр і може зменшити байєсівський ризик.
Формула Байєса для обчислення апостеріорного розподілу
ξω(X)=
-ймовірність настання параметра ω, якщо спостерігали .