

39. Арм диспетчера адп позволяет:
-осуществлять предварительное планирование движения ВС на основе Центрального расписания и повторяющихся планов полетов;
-составлять расписание движения ВС на заданную дату по данным Центрального расписания и заявок;
-осуществлять суточное планирование на основе расписания движения ВС и заявок типа «ППЛ»;
-автоматически составлять расписание движения ВС на текущие сутки с разделением на вылет и прилет;
- создавать предварительные планы полетов в полуавтоматическом режиме в виде таблицы или путем заполнения экранной формы;
-производить обработку повторяющихся планов полетов и автоматическую активизацию планов;
-создавать гибкие выходные формы по данным Центрального расписания, суточного и текущего планов полета;
-передавать заранее подготовленные и оперативно составленные телеграммы по сети АФТН согласно табелю сообщений о движении ВС, а также телеграммы в произвольной форме;
-принимать по сети АФТН и обрабатывать телеграммы с целью коррекции существующих планов полетов и заявок;
-создавать архивы текущих планов полетов на вылет и прилет, принятых и переданных телеграмм с указанием выходной формы архива;
-создавать выходные формы по данным архивов
40. Циркулирующая в комплексе «Альфа» информация может быть разделена на статическую и динамическую части. К статическим данным относятся: карта ВП; параметры ВС;
параметры зон управления и аэродромов; нормативная и справочная информация. В свою очередь, карта ВП включает: секторы управления; географические точки и ПОД; аэродромы; маршруты; трассы
Помимо этого, картогргафическая информация описывает способ визуализации всех объектов ВП - обозначение пунктов, аэродромов, трасс и т.д
41. К динамической информации относится: координатная (цифровая и оцифрованная аналоговая) и полетная информации, пеленгационная информация, планы полетов и сообщения о корректировке планов полетов. Блок полетной информации содержит:
Координаты ВС, позывной (режим УВД; или код ответчика (режим RBS, текущую высоту, остаток топлива (только режим УВД
42. Формуляр сопровождения состоит из трех строк по десять знакомест в каждой строке, и позволяет выводить следующую информацию:
код ответчика;
позывной;
признак сектора управления;
признак бедствия;
высота текущая;
тенденция изменения высоты;
высота заданная;
пункт назначения;
азимут, дальность;
широта, долгота;
остаток топлива;
предписанный эшелон.
Формат формуляра включает в себе восемь полей, каждое из которых несет следующую информацию (рис. 9):
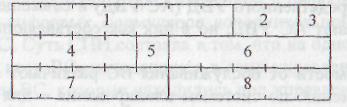
Поле 1: 1) код автоматизации ВС;
2) радиотелефонный позывной ВС.
Поле 2: признак рабочего места, на управлении которого находится ВС.
Поле 3: дополнительная информация, которая может принимать следующие значения: «Б» - если от ВС поступил сигнал бедствия.
Поле 4: значение текущей высоты в десятках метров (с буквой «А» на первом знакоместе относительно уровня аэродрома, без буквы «А» - относительно уровня с атмосферным давлением со значением 760 мм рт.ст.).
Поле 5: символ тенденции изменения высоты («I» - набор высоты, «4» -снижение высоты).
Поле 6:1) заданный диспетчером эшелон в сотнях метров; 2) сокращенное название пункта назначения
Поле 7: 1) путевая скорость ВС (в км/ч) с буквой «С» на первом знакоместе;2)остаток топлива (в процентах) с буквой «Т» на первом знакоме сте;3) азимут ВС с буквой «А» на первом знакоместе;
4)географическая широта ВС в формате: первые три цифры - градусы, следующие две цифры - минуты.
Поле 8: 1) предписанный эшелон в сотнях метров с буквой «Н» на первом знакоместе;2)курс ВС с буквой «К» на первом знакоместе;3)удаление ВС с буквой «Д» на первом знакоместе;4)географическая долгота ВС в формате: первые три цифры -градусы, следующие две цифры – минуты
43. Различные автоматизированные системы, связанные с воздушным движением, классифицируют по назначению и по районам применения.
По назначению различают АС планирования воздушного движения (АС ПВД), непосредственного УВД (АС УВД) и совмещенные системы, которые также называют АС УВД, но в них как составляющая часть могут входить АС ПВД.
В зависимости от обслуживания ВС различают следующие АС по районам применения: по системам планирования - для главного, зонального и районных центров ЕС ОрВД; по системам непосредственного УВД - районные, аэродромные, аэроузловые и смешанные АС УВД; АС контроля за движениям наземного транспорта
44. АС УВД «Старт» обеспечивала автоматизированный сбор и обработку координатной РЛИ по всем ВС независимо от того, оборудованы они ответчиками системы ВРЛ или нет, реализовывала автоматическое сопровождение 36 ВС, находящихся в зоне действия обзорной РЛС, и до двух ВС, заходящих на посадку и находящихся в зоне действия посадочной РЛС. По ВС, оборудованным самолетными ответчиками, были автоматизированы сбор и обработка дополнительной информации, передаваемой по информационному каналу системы ВРЛ (бортовой номер ВС, высота полета, потеря радиосвязи и некоторая другая информация).
В качестве основных источников информации о воздушной обстановке использовались обзорная и вторичная РЛС, а при наблюдении за ВС на предпосадочной прямой - посадочный радиолокатор. Данные о координатах ВС от РЛС транслировались по узкополосным телефонным, широкополосным кабельным и радиорелейным линиям. Вспомогательным источником информации являлся АРП.
Вычислительный комплекс состоял из двух ЭВМ: одна - основная, вторая находилась в нагруженном режиме (переход на резервную ЭВМ осуществлялся автоматически). Каждая ЭВМ принимала информацию о координатах ВС и данных о нем, получаемых от системы вторичной радиолокации, проверяла правильность получаемой информации, а затем подвергала ее вторичной обработке, которая сводилась к завязке траектории, построению траектории движения ВС, вычислению параметров движения, необходимых диспетчеру, в том числе и экстраполированных значений координат, одновременно решалась задачи идентификации траекторий, т.е. их принадлежности данному ВС.
Подсистема отображения и оперативного управления предназначалась для отображения на совмещенном плане-индикаторе (СПИ) ВО радиолокационной координатной информации, представленной в цифровой и аналоговой формах, буквенно-цифровых формуляров дополнительной информации по сопровождаемым ВС. Суть СПИ состояла в том, что на одном экране отображались отметки от всех ВС, находящихся в зоне управления, а рядом с отметками - формуляры ВС, которые находились под управлением у диспетчера, причем данная информация отображалась в зоне структуры ВП.
Используемые методы отображения информации определяли три режима отображения:
Совместный, когда на экране одновременно отображалась радиолокационная, графическая и дополнительная знаковая информация.
Радиолокационный, при котором на фоне статической графической информации отображалась аналоговая радиолокационная информация.
Знаковый, предусматривающий отображения знаковой информации на фоне статической графической.
Как видно из вышесказанного, комплекс «Старт» в своей основе уже имел все те основные подсистемы, которые входят в состав современных АС УВД. Были приняты меры по обеспечению высокого уровня надежности (для того времени - 70-е годы), обеспечению соответствующей степени автоматизации и т.д. Но технические, вычислительные, организационные и другие возможности комплекса «Старт» не позволяли его использовать по мере увеличения интенсивности полетов и нарастания плотности ВД. Поэтому на смену комплекса «Старт» приходили другие АС УВД, начиная с АС УВД «Спектр».
45. Комплекс «Спектр» позволяет осуществлять автоматизированное УВД на всех этапах полета ВС в ВП аэроузла, включая посадку, взлет и руление (частично). АС УВД «Спектр» отличается от АС УВД «Старт» более совершенной и полной обработкой РЛИ, наличием подсистем обработки планов полетов и метеоинформации, существенно большими вычислительными возможностями и объемами решаемых задач.
В функции АС УВД «Спектр» входит сбор и обработка данных: координатной информации о действительном местонахождении ВС (по сигналам ПРЛ и ВРЛ, причем информация от обоих радиолокаторов объединяется); информации о планах полетев; информации, поступающей с рабочих мест диспетчеров подхода, круга, руководителей полетов аэроузлового диспетчерского центра (АДЦ), а также диспетчеров старта, руления, посадки аэродромного командно-диспетчерского пункта (АКДП) трех аэродромов аэроузла. Кроме того, ведется прием, обработка и передача информации, циркулирующей в АФТН (плановой к метеорологической); автоматически рассчитываются и печатаются элементы планов полетов (так называемые «стрипы»); обрабатывается и отображается информации о фактической и прогнозируемой погоде, об очагах опасных метеоявлений; отображаются данные об ограничениях ВП. В комплексе «Спектр» предусмотрены: идентификация координат ВС с помощью АРП; документирование и воспроизведение информации о ВО, а также речевой информации, передаваемой по внутренним и внешним каналам связи; тренировка диспетчерского состава на резервных пультах; непрерывный функциональный и тестовый контроль работоспособности оборудования.
В результате обработки разнообразной информации комплекс определяет и предупреждает диспетчеров о возможных КС и о снижении ВС ниже минимально безопасной высоты.
Источниками информации служат РЛК, посадочные радиолокаторы, ЦКС АФТН, приемо-передающий центр, подсистема обработки метеоинформации об очагах опасных метеоявлений «Метеоячейка - С2», комплексные радиотехнические автоматические метеостанции (КРАМС).
Индикаторы ВО могут работать в трех режимах:
1 Аналоговый, когда отображаются метки азимута, дальности и отметки ВС.
2Синтетический, в котором отображаются синтетические отметки местоположений ВС, с формулярами сопровождения, картографическая информация, плановая информация в виде списков входа и вылета, метеоинформация и сведения о положении очагов опасныхметеоявлений, границы действующих ограничений для полетов, информация, предупреждающая диспетчера о снижении ВС ниже минимально безопасной высоты, возможности возникновении КС и т.п., дополнительная знаковая и графическая системная информация
3Совместный, когда сочетаются аналоговая и синтетическая информация.
В АС УВД «Спектр» был впервые применен принцип модульного построения системы, который позволяет на базе функциональных блоков комплекса «Спектр» создавать АС различной емкости и производительности не только для районов аэродромов, но и для РЦ, образуя интегрированные аэро-дромно-районные АС УВД (АРАС УВД).
46. Районные АС УВД являются наиболее сложными, так как объекты системы разнесены на большой территории, число радиолокационных позиций велико, управление ими достаточно сложное..
Районная АС УВД «Теркас» решает следующие основные задачи:
автоматический ввод в сопровождение и автоматическое сопровождение ВС по данным вторичных и первичных РЛС (ПРЛ);
буквенно-цифровое отображение информации о действительном и планируемом движении;
автоматизированный прием-передачу ВС на управление внутри системы и с внешними АС;
прием и обработку информации о планах полета на этапах предварительного и текущего планирования;
расчет и отображение текущих планов полетов и информации о планируемой загрузке отдельных элементов структуры ВП;
коррекцию текущих планов полета по РЛИ;
прием и отображение метеоинформации и информации от ОВЧ-радиопеленгаторов;
документирование, оперативное воспроизведение информации о ВО, а также информации, передаваемой по внутренним и внешним каналам связи;
объединение РЛИ от РЛС, установленных на радиолокационных позициях.
В состав структурной схемы районной АС УВД «Теркас» входят радиолокационная подсистема, включающая 10 радиолокационных позиций (Московский район УВД) и центр управления.
Каждая радиолокационная позиция содержит ПРЛ с радиопрозрачным укрытием (в Московской зоне УВД - это ПРЛ типа ATCR-22, ATCR-44, ТРЛК-10, УТЕС-А, УТЕС-Т) и сопряженный с ним ВРЛ (в Московской зоне УВД - это ВРЛ типа Kopeнь-AC, Радуга-В, МВРЛ-СВК, Крона), сдвоенный комплект комбинированной .АПОИ, АРП, а также ОВЧ-радиостанцию с аппаратурой дистанционного управления и модемы подсистемы связи и передачи данных
47.стр-я схема «теркас»
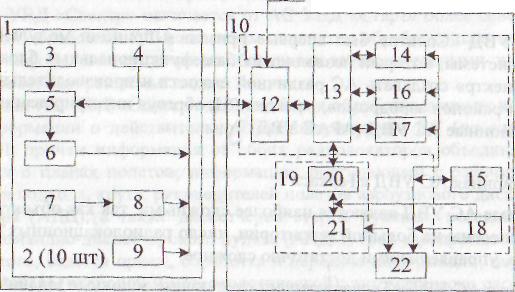
1 - радиолокационная подсистема; 2 - радиолокационная позиция; 3 - ПРЛ; 4 - ВРЛ; 5 - АПОИ; 6 -модем подсистемы связи; 7 - АРП; 8 - модем передачи данных; 9 - ОВЧ-радиостанция; 10 - Центр управления; 11 - подсистема связи и передачи данных; 12 - аппаратура приема данных от радиолокационных позиций и смежных систем УВД; 13 - кроссировочное устройство; 14 - средства передачи данных; 15 - средства записи переговоров; 16 - средства связи с ВС; 17 - средства внутренней и внешней оперативной телефонной связи; 18 - система единого времени; 19 - комплекс обработки информации; 20 - аппаратура сопряжения; 21 - ЭВМ; 22 - комплекс отображении информации
Центр управления 10 связан с каждой РЛП двумя узкополосными линиями связи с пропускной способностью по 2400 бит/с каждая.
Линии связи имеют встроенный канал обратной связи с малой пропускной способностью (75 бит/с). Он используется для контроля параметров линии и в случае неисправности одной из линий выход АПОИ (комплект АПОИ также называют экстрактором) автоматически переключается на исправную линию.
С помощью средств передачи данных 14 и телеграфной связи на Центр управления поступает в цифровом виде плановая информация, а также осуществляется автоматизированный обмен информацией с аэроузловой АСУВД. Планы полетов передаются по четырем телеграфным каналам со скоростью 50 бод на центр телеграфной связи.
Средства связи с ВС делятся на ближние 16, которые размещаются на передающем и приемном радиоцентрах, удаленных от Центра управления на расстояние до 5 км, и дальние 9, находящиеся, как правило, на РЛП. Ближние радиостанции управляются напрямую по проводным каналам, а дальние - по стандартным телефонным каналам связи."
48. Аэроузловые АС УВД предназначены для обеспечения безопасности полетов и повышения эффективности УВД в районе аэроузла, в состав которого входит несколько аэродромов и ВП над ним. Непрерывный радиолокационный контроль в районе аэроузла достигается одновременной работой нескольких РЛС, поэтому в аэроузловых АС УВД большинство задач радиолокационной обработки аналогичны тем задачам, которые решаются в трассовых (районных) АС УВД. Особенности построения аэроузловых АС УВД рассмотрим на примере Московской аэроузловой системы. Данная система решает следующие основные задачи:
прием и обработку РЛИ, поступающей от всех РЛК, оснащенных ПРЛ и ВРЛ;
объединение информации, поступающей от РЛК, и формирование единой картины ВО;
автосопровождение до 100 ВС одновременно по данным ВРЛ и планов полетов;
автоматизированную прием-передачу управления ВС;
прием и обработку данных АРП с четырех позиций;
автоматизированный обмен плановой и радиолокационной информацией с трассовой АС УВД;
буквенно-цифровое отображение радиолокационной и дополнительной информации о ВС, а также вспомогательной динамической и статической графической информации;
прием-передачу сообщений с КДП четырех аэродромов, входящих в состав аэроузла.
Эти задачи и определили структуру аэроузловой АС УВД «Теркас» (рис. 11). Технические средства, входящие в состав аэроузловой АС УВД аналогичны техническим средствам районной АС УВД «Теркас».
Характерной особенностью аэроузловой АС УВД является наличие в ней комплексов отображения РЛИ и оконечных устройств для взаимодействия с диспетчерами посадки, старта и руления, расположенных на аэродромах. Такое построение системы УВД обеспечивает оперативное взаимодействие между диспетчерами круга, расположенными в Центре управления, с диспетчерами старта и посадки каждого аэродрома, соответственно, а также с диспет черскими пунктами аэродрома, непосредственно планирующими вылеты и посадки ВС

49. Районная АС УВД «Стрела» предназначена для автоматизации процесса планирования и УВД в районах с интенсивным ВД. В ней предусмотрено решение задач долгосрочного, суточного и текущего планирования, а также непосредственного (оперативного) УВД. Структура АС УВД «Стрела» типовая. В ее состав входят комплексы аппаратуры Центра управления, радиолокационные, аппаратуры речевой связи, а также радиоцентры, автоматические радиопеленгаторы и абонентские пункты.
Основы Центра управления составляют пять ЭВМ, по две из которых группируются в вычислительные комплексы обработки радиолокационной и плановой информации, а пятая ЭВМ является резервной. Информация с вычислительных комплексов поступает на пульты диспетчеров секторов УВД и на группу пультов технического обслуживания.
РЛП обеспечивают непрерывное радиолокационное поле в районе функционирования системы с высоты 3000м, а вблизи мест базирования радиолокационного комплекса и с меньших высот. Каждая позиция состоит из ПРЛ и ВРЛ, информация с которых поступает на два комплекса комбинированной аппаратуры первичной обработки информации, из АРП, используемого как резервное средство опознавания ВС, и ОВЧ-радиостанций для связи с экипажами ВС. Комплекты АПОИ функционируют независимо друг от друга, причем один комплект рабочий, а второй - резервный. Сигналы с них и АРП через модемы поступают в линии телефонной связи с Центром управления.
Центр управления связан с каждой РЛП двумя узкополосными линиями связи (скорость передачи по каждой 2400 бит/с). В случае неисправности одной из линий модем автоматически подключается к исправной линии. Для обеспечения связи и передачи данных используется несколько приемопередающих радиоцентров и автоматизированных абонентских пунктов аэропортов. Обеспечивается также взаимодействие с соседними РЦ и диспетчерскими пунктами, ЗЦ и другими АС УВД. Средства внутренней и внешней оперативной телефонной связи служат для ведения переговоров диспетчеров с абонентами. Средства магнитной записи дают возможность записывать переговоры диспетчера по радиоканалам, каналам внутренней и внешней связи с одновременной записью сигналов единого времени. Система единого времени (СЕВ) выдает информацию о текущем времени на все диспетчерские пункты и на средства магнитной записи.
Центр управления принимает информацию, поступающую с РЛП, проводит ее вторичную обработку и объединяет данные от одних и тех же ВС, причем ввод в автосопровождение возможен как вручную с использованием датчика прямоугольных координат, так и автоматически на основе информации о планах полетов. Автоматизирован также процесс приема и передачи управления диспетчерами системных секторов, т.е. этот процесс осуществляется без ведения специальных переговоров между диспетчерами.
Одновременно с информацией о ВО Центр управления принимает и обрабатывает информацию о планах полетов. Предусмотрено также документирование информации, при котором возможно воссоздание картами ВО в прошлом, в точно указанное время. В систему также поступает метеоинформация от нескольких метеорадиолокаторов и метеоданные о состоянии погоды на аэродромах, которые используются для планирования и оперативного УВД,
Комплекс технических средств РЦ дает возможность организовать тренировку диспетчеров одновременно с основным режимом работы. Для тренировки используются находящиеся в резерве пульты управления и планирования полетов. Предусмотрена возможность тренировки по данным реальной ВО и действующим планам полета.
В АС УВД «Стрела» для предварительного (суточного) планирования полетов разработаны специальные пульты организации потоков ВС. Этот процесс позволяет также более эффективно использовать ВП, сглаживать пики в движении ВС и исключать перегрузки в отдельных зонах управления
50 Для районов со средней интенсивностью ВД разработана система «Трасса». Она предназначена для приема, обработки, трансляции, объединения и отображения информации о ВО, получаемой от четырех РЛП, одна из которых находится не далее 5км от центра. Система «Трасса» состоит из КСА РЛП и РЦ. Каждая РЛП оборудована ПРЛ, ВРЛ, АПОИ, аппаратурой сопряжения и передачи данных. На каждой РЛП дополнительно установлен АРП и радиостанции. КСА РЛП предназначен для автоматического съема, первичной обработки и преобразования информации о ВО в зоне действия позиции; автоматического приема информации, поступающей от АРП; отождествления и объединения данных от ПРЛ, ВРЛ и АРП и передачи их в РЦ по четырем телекодовым каналам связи; ретрансляции сигналов дистанционного управления радиостанциями, развернутыми на РЛП
КСА РЦ имеет групповую аппаратуру обработки информации и коллективные РМ диспетчеров; радиолокационного управления, диспетчера графической информации и диспетчера-оператора. Групповая аппаратура принимает сообщения, поступающие по телекодовым каналам от КСА РЛП, и аналоговую информацию от РЛС, расположенной вблизи центра. Затем информацию от РЛС отождествляют в зонах перекрытия радиолокационных полей, исключают избыточность и строят мозаичное отображение информации. Групповая аппаратура анализирует сообщения по каналу ВРЛ, устраняет ложные сообщения, очищает от помех дополнительную информацию ВРЛ, используя несколько источников. Предусмотрен автоматизированный ввод в автоматическое сопровождение до 15 ВС, не оборудованных ответчиками ВРЛ. Как только РЛИ обработана, групповая аппаратура распределяет ее по секторам управления и направляет на индикаторы ВО (ИВО) коллективных РМ диспетчеров.
Коллективное РМ диспетчера содержит два ИВО с панелями управления, обеспечивающими независимое и идентичное управление изображениями, алфавитно-цифровой дисплей с двумя видеоконтрольными устройствами, датчик прямоугольных координат, планшет диспетчера для ведения графика «Время-путь», пульты дистанционного управления радиостанциями, панели аппаратуры громкоговорящей и телефонной связи.
ИВО диет возможность отображать информацию в синтетическом и аналого-цифровом режимах, изменять масштаб изображения и смещать центр отображаемого района в любую точку. На экране ИВО отображается карта-схема и до 850 знаков и символов, рассчитанных на одновременное отображение на одном ИВО до 25 отметок от ВС и формуляров к ним. Предусмотрены документирование видеоинформации и запись переговоров.
КСА «Трасса» дешевле и проще трассовых АС УВД, она приспособлена к использованию имеющихся сравнительно дешевых серийных РЛС, однако в ней отсутствует автоматизация планирования, и нет метеообеспечения. Поэтому применение системы «Трасса» существенно улучшает условия труда только диспетчеров оперативного УВД
51. Рост интенсивности потоков ВС, с одной стороны, а с другой - протяженность территории и особенности географического положения России диктуют необходимость укрупнения центров УВД и создание объединенных центров управления полетами (ЦУП). При этом преследуются следующие цели:
-достижение мирового уровня безопасности полетов в соответствии с рекомендациями ИКАО и концепцией CNS/ATM;
-обеспечение гибкости системы ОВД, позволяющей ей развиваться и адаптироваться к изменяющимся условиям и потребностям пользователей ВП; повышение технико-экономической эффективности системы ОВД путем снижения эксплуатационных расходов при повышении уровня безопасности УВД.
Поставленные цели достигаются за счет применение новых высоких информационных технологий и современных технических средств связи, наблюдения и навигации. С их помощью обеспечиваются высокая надежность и достоверность больших объемов обрабатываемой и передаваемой информации. Все это, в свою очередь, приводит к уменьшению загрузки диспетчеров, так как снижает риск несвоевременного обнаружения КС или неправильного их разрешения.
В итоге открываются новые возможности совершенствования структуры ЕС ОрВД РФ, сокращения количества РЦ (ВРЦ), уменьшения числа секторов управления и упрощения их конфигурации
52создание объединенных ЦУП требует решения целого комплекса организационно-технических проблем, наиболее важная из которых - обеспечение их новыми современными средствами радиотехнического обеспечения полетов (РТОП) и связи.
В качество источников информации о ВО, поступающей в ЦУП, должны использоваться высокоинформативные современные сенсоры. К ним относятся:
первичные обзорные трассовые РЛС (ОРЛ-Т);
моноимпульсные ВРЛ;
АРП;
транспондеры системы АЗН.
Соответствующее количество РЛП и их взаимное расположение обеспечивают необходимость перекрытия зоны наблюдения и мультисенсорную обработку информации. Включение в состав РЛК первичных ОРЛ-Т позволяет существенно повысить эксплуатационные характеристики и характеристики надежности (непрерывность, безотказность, целостность, готовность и др.) при отказах бортового РЭО (самолетных ответчиков и транспондеров АЗН), а также при обслуживании ВС, не оборудованных самолетными ответчиками.
Фиксированная авиационная связь используется для передачи в ЦУП РЛИ и данных о состоянии и режимах работы средств РТОП, а также для посылки команд управления на РЛП и для прямой речевой связи. Для этих целей используются арендованные каналы связи и соединительные линии для подключения к магистральным линиям связи, цифровые линии передачи данных и земные станции спутниковой связи.
При создании ЦУП возникает необходимость централизованного управления всеми ОВЧ-приемопередатчиками, установленными на РЛП, и объединения их работы на одной частоте для создания единого ОВЧ-поля. Для реализации этих потребителей внедряются принципиально новые технические решения. К ним следует отнести установку на РЛП совместных унифицированных автоматизированных приемопередающих центров со встроенными наземными комплексами передачи данных. Собственно оборудование ЦУП разделяется на следующие сегменты:
сегмент УВД;
сегмент планирования полетов и ИВП.
Оборудование сегмента УВД включает серверы и АРМ диспетчеров (по числу секторов управления и, кроме того, используются резервные АРМ), которые объединены в локальные сети. Сюда же входят АРМ руководителей полетов (районов и аэродромов), АРМ инженера и групповое оборудование, система речевой связи, средства документирования, тренировочный модуль, вспомогательное оборудование.
Интерфейс осуществляется устройствами сопряжения с ЛПД, связывающими ЦУП с РЛП, и линиями связи с внешними источниками - потребителями информации.
Сбор, обработка информации, ее преобразование, реализация функций поддержки принятия решений и управление отображением выполняются подсистемами, входящими в АС УВД, которая представляет собой вычислительное ядро объединенного ЦУП.
Высокий уровень надежности и безопасности полетов обеспечивается сочетанием ряда факторов. К ним относятся:
высокая информативность источников информации и их рациональное сочетание;
совершенствование алгоритмов обработки данных;
наглядное и качественное представление информации о ВО;
организация помощи диспетчеру УВД в принятии решений
53. В качестве базовой АС УВД целесообразно принять аэродромно-районную систему (АРАС УВД), которая в зависимости от конкретных условий может быть реконфигурирована как в районную, так и аэродромную систему.
АР АС предназначена для обеспечения безопасности полетов, повышения регулярности и экономичности полетов авиации различных ведомств в районе аэродрома, на воздушных трассах и во внетрассовом ВП путем автоматизации текущего планирования, сбора, обработки и отображения РЛИ (в перспективе информации, получаемой по каналам АЗН) и метеоинформации.
В соответствии со своим назначением такие системы должны решать следующие основные задачи:
прием, обработка и отображение информации, в том числе радиолокационной, радиопеленгационной, плановой, аэронавигационной, справочной и вспомогательной, а также данных о техническом состоянии и режимах работы оборудования периферийных объектов и каналов передачи данных;
передача информации внешним пользователям по каналам сети аэронавигационной СЛужбы передачи данных;
обеспечение взаимодействия с периферийными объектами, со смежнымиАС и комплексами УВД, метеорологическими комплексами и системами, а также объектами системами технологического взаимодействия органов ЕС ОрВД РФ (службы аэропортов, авиакомпании, органы УВД района или аэроузла, органы УВД смежных зон или центров УВД и др.);
обеспечение обучения и тренировки диспетчерского состава;
осуществление контроля и управления техническим состоянием оборудования системы;
документирование и воспроизведение различных видов информации;
информационная поддержка расчетов по сборам за аэронавигационное обслуживание