

33. Причины возникновения ложных тревог при определении кс могут быть следующие:
-недостаток и недостоверность исходных данных для определения точных норм эшелонирования;
-погрешности измерений или сбой в работе источников информации.
Причинами возникновения ложных тревог при определении ПКС могут быть:
- отсутствие или недостоверности плановой траектории (особенно в маневренных зонах, например, в зоне взлета и посадки);
- отсутствие планового вертикального профиля;
-значительные изменения скоростного режима (например, в зоне взлета и посадки).
вероятность ложных тревог при КС и ПКС является одним из параметров, характеризующих качество функционирования АС УВД. Таким образом, в целях максимального уменьшения вероятностей появления ложных тревог и пропусков ПКС и КС необходим как можно более полный сбор исходных данных (при условии наличия соответствующей степени достоверности и оперативности).
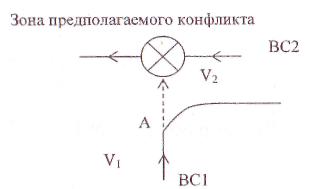
Рис7Пример возникновения ложной тревоги, где сплошные линии показывают маршрут плановых полетов ВС1 и ВС2, а пунктирная линия показывает прогноз движения ВС2 после т. А маршрута
34. Комплекс «Альфа» выполняет функции по сбору и преобразованию радиолокационных данных о ВО, пеленгационной и плановой информации, распределение данных по рабочим местам диспетчеров УВД и их отображение. Предназначен для использования в районных и аэродромных центрах УВД.
Источником информации для КСА УВД «Альфа» могут служить РЛС и РЛК типа 1РЛ-139, ДРЛ-7СМ, Экран-85 и др., при этом возможна совместная обработка информации от нескольких РЛС (как от первичных, так и от вторичных). Кроме того, в комплексе предусмотрено сопряжение с радиопеленгатором, аппаратурой АРМ диспетчера АДП, аппаратурой АРМ «Метеоролог», сетью АФТН и др
Система «Альфа» предусматривает максимальное использование существующих средств РЛК, коммуникаций, линий связи и т.д., что позволяет модернизировать оборудование УВД с минимальными затратами.
Для повышения надежаости комплекса в нем используются методы аппаратного и информационного резервирования.
Система имеет распределенную архитектуру, в которой каждая ЭВМ выполняет свою, независимую от другой ЭВМ, функцию. Распределённая архитектура позволяет оптимизировать связь, наращивать системы и модернизировать их. Такая архитектура допускает работу в режиме сокращенного состава технических средств, что обеспечивает полную эксплуатационную готовность системы при возкикновении локальных отказов.
Для упрощения технического обслуживания и сокращения затрат в течение срока службы оборудование комплекса «Альфа» ориентировано на максимальное использование стандартных средств.
К нестандартному оборудованию относятся:
устройство преобразования радиолокационной информации;
устройство сопряжения с АРП;
платы сопряжения с сетью АФТН;
часть интерфейсного оборудования.
Вычислительный комплекс строится на базе ПЭВМ и/или рабочих станций
35.

Комплекс «Альфа включает в себя групповое и индивидуальное оборудование. Групповое оборудование осуществляет прием и обработку РЛИ, а также передачу обработанной информации на РМ диспетчеров средствами ЛВС. Индивидуальное оборудование осуществляет прием и отображение РЛИ, принятой и обработанной в групповом оборудовании
В состав группового оборудования входят:
модуль централизованной обработки (только для сетевого варианта) -сервер системы;
коммуникационное оборудование;
модуль распределения исходных сигналов РЛС (только для локального варианта).
В состав индивидуального оборудования входят:
модуль отображения динамической воздушной обстановки (ДВО) - рабочая станция диспетчера;
модуль сопряжения с АРП.
Комплекс также включает модуль преобразования РЛИ, входящий в состав группового оборудования.36 вопрос
Обработка плановой информации осуществляется отдельной подсистемой - аппаратурой АРМ диспетчера АДП.
Модуль отображения комплекса «Альфа» способен воспроизводить первичную, координатную информацию в оцифрованной аналоговой форме, вторичную координатную и дополнительную (полетную) информацию в цифровой и в оцифрованной аналоговой формах
36. Модуль преобразования РЛИ включает устройство двух типов:
1. Скан-конвертер (по одному на каждый ПРЛ);
2. Дешифратор активного канала (по одному на каждый ВРЛ);
Скан-конвертер преобразует сигналы ПРЛ в цифровую форму для получения координатной информации в оцифрованной аналоговой форме. Дешифратор активного канала преобразует исходные сигналы ВРЛ в цифровую форму для получения координатной информации в оцифрованной аналоговой форме и производит дешифрирование полетной информации по каналам УВД и RBS. В том случае, если в состав РЛС входит АПОИ, возможно использование информации от АПОИ в цифровой форме. Модуль преобразования РЛИ формирует кодограммы следующих типов:
1. Кодограмма сервера.
2. Кодограмма оцифрованной аналоговой (первичной или вторичной) координатной информации.
3. Кодограмма вторичной координатной и полетной информации.
В зависимости от типа РЛС и конкретных условий модуль преобразования РЛИ располагается либо целиком на КДП, либо частично на радиолокационной позиции (РЛП), а частично на КДП- Во втором случае обмен данными между РЛП КДП осуществляется по телефонным линиям при помощи модемов. Для обеспечения надежности связь с каждой РЛП осуществляется по двум параллельным линиям связи.
37. Модуль централизованной обработки представляет собой сервер РЛИ. В целях повышения надежности устанавливают два комплекта серверов - основной и резервный, которые полностью взаимозаменяемы. Сервер РЛИ по лучает от модуля преобразования РЛИ данные от всех используемых РЛС и обеспечивает их рассылку по рабочим местам диспетчеров
38. Обработка планов полетов осуществляется входящей в состав КСА «Альфа» аппаратурой АРМ диспетчера УВД, о чем говорилось выше (3-й раздел). Рассмотрим вопрос более подробно.
АРМ диспетчера АДП предназначен для работы по предварительному, суточному и текущему планированию на основе Центрального расписания, повторяющихся планов полетов и рейсов, выполняемых вне расписания (заявок типа «ППЛ»). Предусмотрено соединение АРМ с линией АФТН, автоматизация основных процедур по составлению, получению и обработке исходящих и приходящих телеграмм.
АРМ АДП осуществляет обработку сообщений сети АФТН и распределение планов полетов. Обработка планов полетов включает представление каждого полученного сообщения в стандартных формах, выдачу диспетчеру сообщений о выявленных ошибках, идентификацию каждого сообщения в соответствии с установленной классификацией, принятой в ГА, последующий автоматический или ручной ввод в базу данных, корректировку планов полетов по информации, полученной из нескольких источников.