

23.Для автоматизации принятия решений в современных ас увд реализованы следующие функции:
-обнаружение и сигнализация конфликтных ситуаций (КС) между ВС;
-прогнозирование воздушной обстановки и сигнализация возможного возникновения потенциально конфликтной ситуации (ПКС) между ВС;
-обнаружение и сигнализация достижения минимальной безопасной высоты;
согласование условий входа/выхода ВС между смежными диспетчерскими пунктами;
-сигнализация прохождения контрольных точек;
-сигнализация пересечения рубежей приема/передачи;
-сигнализация пересечений/попаданий в зону запретов и ограничений;
-расчет и предложение оптимальной очередности захода ВС на посадку;
-сигнализация нарушения параметров установленной траектории при заходе ВС на посадку;
-корректировка плановой информации по фактическим данным как в рамках одной системы, так и между смежными центрами УВД;
-присвоение/предложение свободных кодов ВРЛ воздушным судам, входящим в зону действия РЛК во избежание появления повторяющихся кодов
24. Проблема предотвращения столкновений вс в воздухе имеет три фазы своего решения:
Первая - обнаружение и сигнализация об угрозе столкновения.
Вторая состоит в выработке управляющих команд.
Третья - в исполнении этих команд.
Определяющим для выбора варианта решения задачи является наличие полной информации о ВС в той области ВП, где создалась угроза столкновения. Эту информацию обеспечивают бортовые системы предотвращения столкновений (БСПС). БСПС могут взаимодействовать с диспетчерами ВРЛ или работать независимо от в их.
Каждая БСПС позволяет в радиусе до 25 м.миль (45 км) и более оценить параметры движения ВС, наличие угрозы столкновения, выработать рекомендации по предотвращению КС и провести согласование рекомендаций для конфликтующих ВС.
Выполнение этих операций возможно, если ВС оборудованы БСПС и самолетными ответчиками, обеспеченными каналами дискретно-адресной связи, позволяющей обмениваться информацией как между ВС, так и с наземными диспетчерскими пунктами.
Пилоты ВС выполняют только те маршруты, которые соответствуют визуальным и речевым предупредительным и корректирующим рекомендациям БСПС. Диспетчер УВД при получении информации от пилота о выполнении маневра в соответствии с рекомендациями БСПС воздерживается от указаний, которые противоречат рекомендациям.
Ответственность за выдерживание норм эшелонирования ВС, участвующими в разрешении конфликта по командам БСПС, вновь возвращается диспетчеру УВД после наступления следующих событий:
диспетчер подтвердил получение от пилота донесения о том, что его сопровождаемое ВС вновь вернулось на заданную траекторию;
диспетчер подтвердил получение от пилота донесения, что его ВС возобновляет выполнение текущего диспетчерского разрешения, но выдает новое альтернативное разрешение, получение которого подтверждается экипажем.
25. Одна из главных задач диспетчера УВД - обеспечить соблюдение норм эшелонирования для каждого участника ВД. Нормы эшелонирования можно представить в виде геометрического защитного объема, построенного вокруг ВС, параметрами которого являются действующие в данной зоне ответственности службы УВД нормы эшелонирования для каждого ВС (вертикальное и продольное). Тогда КС можно определить как попадание в защитный объем контролируемой ВС других участников ВД. Если под КС подразумевать сближение двух ВС, вызванное нарушением (по крайней мере одним из них) норм горизонтального и/или вертикального эшелонировании, то под ПКС следует понимать ситуацию, которая может привести к конфликтной, если не изменить пространственно-временные траектории участвующих в ней ВС (по крайней мере одного из них).
Последовательность шагов процедуры предотвращения возникновения КС представлена на рис
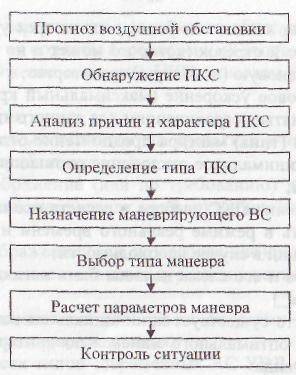
26. прогноз КС и обнаружение ПКС должны осуществляться с временным и пространственным запасом, достаточным для: расчета маневра; передачи команд на борт ВС; выполнения маневра для разрешения (парирования) КС;
анализ причин и характера возникновения КС должен определить способ дальнейших действий;
если ПКС вызвана маневрированием ВС в вертикальной плоскости, то должны быть приняты меры к изменению параметров маневра или к его прекращению;
разрешение КС, возникшей из-за сближения ВС на одном эшелоне, должно осуществляться маневром только одного ВС, что повышает безопасность полетов и снижает напряженность ситуации, как для диспетчера УВД, так и для экипажа ВС;
маневр осуществляется, как правило, только в горизонтальной плоскости. Это позволяет снизить риск возникновения «повторных» КС на одном высотном эшелоне. Маневр по высоте допускается только в исключительных ситуациях;
назначение маневрирующего ВС должно быть обоснованно прокомментировано диспетчером;
вид (тип) маневра должен прямо и непосредственно выбираться из небольшого списка стандартных схем;
с тандартный
маневр состоит не более, чем из трех
участков: S-образный
отворот, прямолинейный отрезок (которого
может и не быть) и S-образный
маневр возврата на плановую (исходную)
траекторию;
тандартный
маневр состоит не более, чем из трех
участков: S-образный
отворот, прямолинейный отрезок (которого
может и не быть) и S-образный
маневр возврата на плановую (исходную)
траекторию;
максимальное боковое ускорение (максимальный крен и темп его изменения) должно подчиняться ограничениям для данного типа ВС;
при выборе схемы (типа) маневра предпочтение отдается той, при которой обеспечивается минимальное отклонение от плановой пространственно-временной траектории;
алгоритм обнаружения ПКС, выбора и расчета схемы разрешающего маневра должен работать в режиме реального времени и допускать внесение определенных коррекций в случае необходимости;
параметры маневра и его схема должны быть наглядно представлены на экране видеомонитора.